Direct Imitation Learning-based Visual Servoing using the Large Projection Formulation
2406.09120
0
0

Abstract
Today robots must be safe, versatile, and user-friendly to operate in unstructured and human-populated environments. Dynamical system-based imitation learning enables robots to perform complex tasks stably and without explicit programming, greatly simplifying their real-world deployment. To exploit the full potential of these systems it is crucial to implement closed loops that use visual feedback. Vision permits to cope with environmental changes, but is complex to handle due to the high dimension of the image space. This study introduces a dynamical system-based imitation learning for direct visual servoing. It leverages off-the-shelf deep learning-based perception backbones to extract robust features from the raw input image, and an imitation learning strategy to execute sophisticated robot motions. The learning blocks are integrated using the large projection task priority formulation. As demonstrated through extensive experimental analysis, the proposed method realizes complex tasks with a robotic manipulator.
Create account to get full access
Overview
- The paper presents a direct imitation learning-based approach for visual servoing, which allows a robot to learn how to control its movements by observing and imitating human demonstrations.
- The key innovation is the use of the "large projection formulation", a technique that can efficiently learn the complex mapping between visual observations and control actions.
- The method is evaluated on a simulated robotic manipulation task, demonstrating its ability to accurately reproduce human-like motions.
Plain English Explanation
In this research, the authors developed a new way for robots to learn how to move and control their actions by watching and imitating humans. Instead of programming the robot with a set of rules, the robot can learn directly from examples of human behavior.
The key part of their approach is the "large projection formulation", which is a mathematical technique that allows the robot to efficiently learn the complex relationship between what it sees (the visual information) and how it should move (the control actions). This means the robot can take in visual observations, like images of an object, and use that to figure out how it should move its joints to manipulate the object in a human-like way.
The researchers tested their method in a simulated robotic manipulation task, where the robot had to pick up and move objects. They found that the robot was able to closely reproduce the motions and behaviors demonstrated by humans, showing the effectiveness of the direct imitation learning approach powered by the large projection formulation.
Technical Explanation
The paper presents a direct imitation learning-based approach for visual servoing, where a robot learns to control its movements by observing and imitating human demonstrations. The key innovation is the use of the "large projection formulation" [1], a technique that can efficiently learn the complex mapping between visual observations and control actions.
The method works by first collecting a dataset of human demonstrations, where a person performs various manipulation tasks while the robot records the visual inputs (camera images) and the corresponding control actions (joint positions and velocities). This data is then used to train a neural network model that can predict the appropriate control actions given new visual observations.
The large projection formulation [1] is a key part of the training process. It allows the model to effectively capture the high-dimensional, nonlinear relationship between the visual inputs and control outputs, without requiring an overly complex architecture. This makes the learning process more efficient and robust compared to naive approaches.
The authors evaluate their method on a simulated robotic manipulation task, where the robot must pick up and move objects to target locations. They show that the robot is able to accurately reproduce human-like motions and behaviors, demonstrating the effectiveness of the direct imitation learning approach powered by the large projection formulation.
Critical Analysis
The paper presents a compelling approach for enabling robots to learn complex manipulation skills through imitation of human behavior. The use of the large projection formulation [1] is a key technical contribution, as it allows the neural network model to efficiently capture the high-dimensional mapping between vision and control without becoming overly complex.
However, the evaluation is limited to a simulated environment, and it would be important to see how the method performs on real-world robotic hardware. Additionally, the paper does not address potential issues around safety, robustness, or generalization to novel tasks or environments. Further research would be needed to understand the practical limitations and deployment challenges of this approach.
It would also be interesting to see how this direct imitation learning method compares to alternative approaches that leverage pre-trained representations or hierarchical task decomposition. A more thorough comparison with state-of-the-art techniques in robotic imitation learning would help situate the contributions of this work.
Overall, the paper presents a promising step towards enabling robots to learn complex manipulation skills through intuitive human demonstration. The use of the large projection formulation is a noteworthy technical innovation that could be applicable to a wider range of imitation learning problems.
Conclusion
This research introduces a direct imitation learning-based approach for visual servoing, where a robot learns to control its movements by observing and imitating human demonstrations. The key technical innovation is the use of the "large projection formulation", a mathematically-grounded technique that allows the robot to efficiently learn the complex mapping between visual inputs and control actions.
The method is evaluated on a simulated robotic manipulation task, demonstrating the robot's ability to accurately reproduce human-like motions and behaviors. While the current evaluation is limited to a simulated environment, the paper presents a compelling approach for enabling robots to learn complex skills through intuitive imitation of human demonstrations.
Further research would be needed to explore the real-world performance, safety, and generalization capabilities of this direct imitation learning approach. Comparing it to alternative imitation learning techniques could also provide valuable insights. Overall, this work represents an important step towards more natural and flexible robot control through human-inspired learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏋️
Fusion Dynamical Systems with Machine Learning in Imitation Learning: A Comprehensive Overview
Yingbai Hu, Fares J. Abu-Dakka, Fei Chen, Xiao Luo, Zheng Li, Alois Knoll, Weiping Ding
0
0
Imitation Learning (IL), also referred to as Learning from Demonstration (LfD), holds significant promise for capturing expert motor skills through efficient imitation, facilitating adept navigation of complex scenarios. A persistent challenge in IL lies in extending generalization from historical demonstrations, enabling the acquisition of new skills without re-teaching. Dynamical system-based IL (DSIL) emerges as a significant subset of IL methodologies, offering the ability to learn trajectories via movement primitives and policy learning based on experiential abstraction. This paper emphasizes the fusion of theoretical paradigms, integrating control theory principles inherent in dynamical systems into IL. This integration notably enhances robustness, adaptability, and convergence in the face of novel scenarios. This survey aims to present a comprehensive overview of DSIL methods, spanning from classical approaches to recent advanced approaches. We categorize DSIL into autonomous dynamical systems and non-autonomous dynamical systems, surveying traditional IL methods with low-dimensional input and advanced deep IL methods with high-dimensional input. Additionally, we present and analyze three main stability methods for IL: Lyapunov stability, contraction theory, and diffeomorphism mapping. Our exploration also extends to popular policy improvement methods for DSIL, encompassing reinforcement learning, deep reinforcement learning, and evolutionary strategies.
4/1/2024
🤯
Robotic Imitation of Human Actions
Josua Spisak, Matthias Kerzel, Stefan Wermter
0
0
Imitation can allow us to quickly gain an understanding of a new task. Through a demonstration, we can gain direct knowledge about which actions need to be performed and which goals they have. In this paper, we introduce a new approach to imitation learning that tackles the challenges of a robot imitating a human, such as the change in perspective and body schema. Our approach can use a single human demonstration to abstract information about the demonstrated task, and use that information to generalise and replicate it. We facilitate this ability by a new integration of two state-of-the-art methods: a diffusion action segmentation model to abstract temporal information from the demonstration and an open vocabulary object detector for spatial information. Furthermore, we refine the abstracted information and use symbolic reasoning to create an action plan utilising inverse kinematics, to allow the robot to imitate the demonstrated action.
6/4/2024
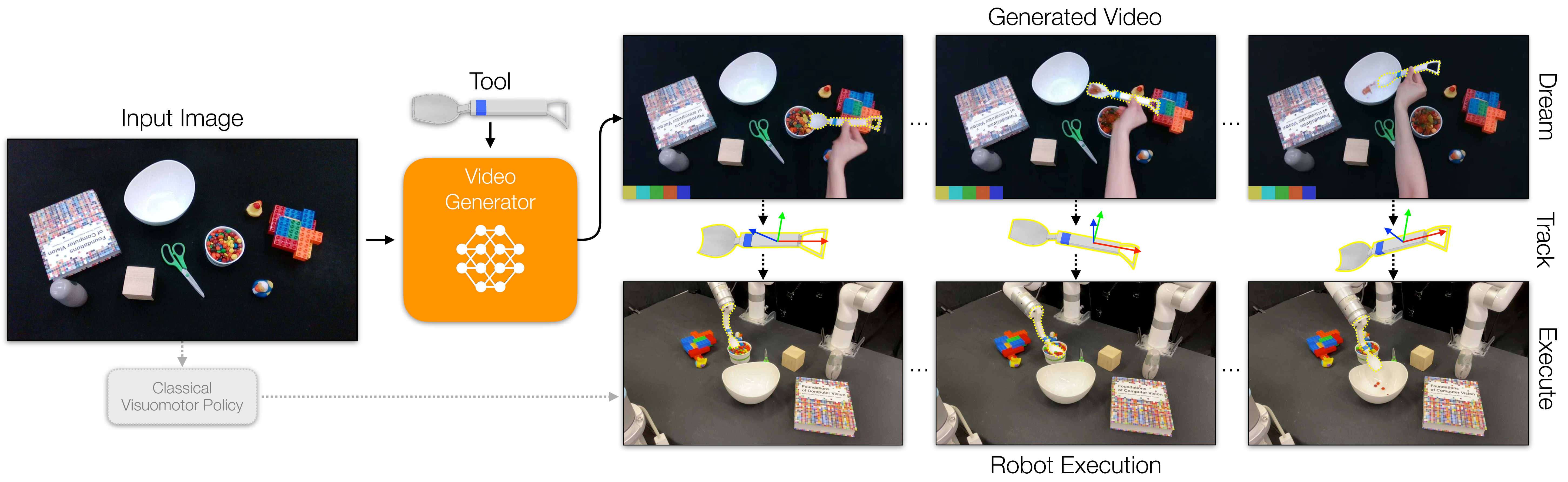
Dreamitate: Real-World Visuomotor Policy Learning via Video Generation
Junbang Liang, Ruoshi Liu, Ege Ozguroglu, Sruthi Sudhakar, Achal Dave, Pavel Tokmakov, Shuran Song, Carl Vondrick
0
0
A key challenge in manipulation is learning a policy that can robustly generalize to diverse visual environments. A promising mechanism for learning robust policies is to leverage video generative models, which are pretrained on large-scale datasets of internet videos. In this paper, we propose a visuomotor policy learning framework that fine-tunes a video diffusion model on human demonstrations of a given task. At test time, we generate an example of an execution of the task conditioned on images of a novel scene, and use this synthesized execution directly to control the robot. Our key insight is that using common tools allows us to effortlessly bridge the embodiment gap between the human hand and the robot manipulator. We evaluate our approach on four tasks of increasing complexity and demonstrate that harnessing internet-scale generative models allows the learned policy to achieve a significantly higher degree of generalization than existing behavior cloning approaches.
6/26/2024

Contrastive Imitation Learning for Language-guided Multi-Task Robotic Manipulation
Teli Ma, Jiaming Zhou, Zifan Wang, Ronghe Qiu, Junwei Liang
0
0
Developing robots capable of executing various manipulation tasks, guided by natural language instructions and visual observations of intricate real-world environments, remains a significant challenge in robotics. Such robot agents need to understand linguistic commands and distinguish between the requirements of different tasks. In this work, we present Sigma-Agent, an end-to-end imitation learning agent for multi-task robotic manipulation. Sigma-Agent incorporates contrastive Imitation Learning (contrastive IL) modules to strengthen vision-language and current-future representations. An effective and efficient multi-view querying Transformer (MVQ-Former) for aggregating representative semantic information is introduced. Sigma-Agent shows substantial improvement over state-of-the-art methods under diverse settings in 18 RLBench tasks, surpassing RVT by an average of 5.2% and 5.9% in 10 and 100 demonstration training, respectively. Sigma-Agent also achieves 62% success rate with a single policy in 5 real-world manipulation tasks. The code will be released upon acceptance.
6/17/2024