Dreamitate: Real-World Visuomotor Policy Learning via Video Generation
2406.16862
0
0
Abstract
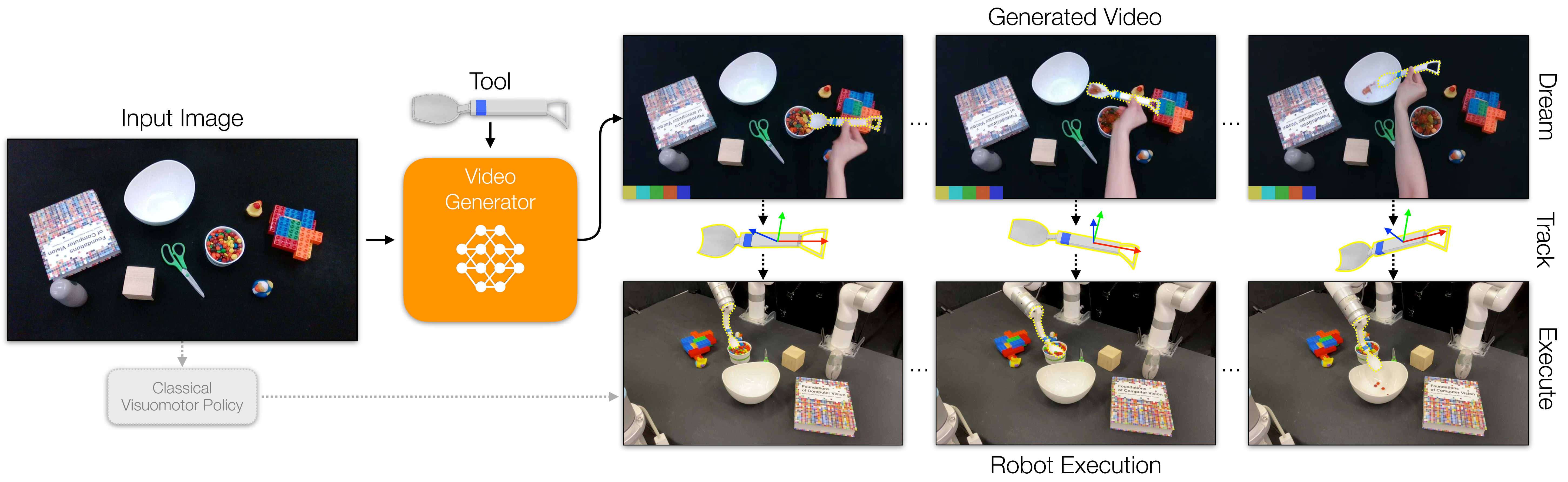
A key challenge in manipulation is learning a policy that can robustly generalize to diverse visual environments. A promising mechanism for learning robust policies is to leverage video generative models, which are pretrained on large-scale datasets of internet videos. In this paper, we propose a visuomotor policy learning framework that fine-tunes a video diffusion model on human demonstrations of a given task. At test time, we generate an example of an execution of the task conditioned on images of a novel scene, and use this synthesized execution directly to control the robot. Our key insight is that using common tools allows us to effortlessly bridge the embodiment gap between the human hand and the robot manipulator. We evaluate our approach on four tasks of increasing complexity and demonstrate that harnessing internet-scale generative models allows the learned policy to achieve a significantly higher degree of generalization than existing behavior cloning approaches.
Create account to get full access
Overview
- This paper presents a method called "Dreamitate" for learning real-world visuomotor policies from video data.
- The key idea is to use a generative video model to "hallucinate" additional training data, which is then used to train a policy network.
- The authors demonstrate that this approach can enable robots to learn complex manipulation skills from just a single human demonstration video.
Plain English Explanation
The goal of this research is to help robots learn new skills by watching humans perform tasks. Typically, robots need to be programmed with detailed instructions or trained on large datasets of demonstrations to learn complex skills. However, this can be time-consuming and expensive.
The researchers developed a method called "Dreamitate" that allows robots to learn from just a single video of a human performing a task. The key insight is to use a special type of AI model called a "generative video model" to create additional training data. This generative model can "hallucinate" or imagine new variations of the task, which the robot can then use to train its own control policy.
The benefit of this approach is that it allows robots to learn complex visuomotor skills - skills that involve coordinating vision and movement - from very limited real-world data. By generating additional synthetic training examples, the robot can learn a general policy that applies to a wide range of variations of the task, rather than just the specific example it was shown.
The researchers demonstrate the effectiveness of their approach on several challenging robotic manipulation tasks, such as [link to "vision-based manipulation" paper] and [link to "imagination-policy" paper]. They show that their method allows robots to learn policies that can successfully complete these tasks after seeing just a single human demonstration.
Technical Explanation
The key technical innovation in this paper is the use of a generative video model to augment the training data available to the policy network. Specifically, the authors train a [link to "MODEM-V2" paper] generative model on a dataset of human demonstration videos. This model can then be used to "hallucinate" new variations of the task, which are fed into a policy network to train a visuomotor control policy.
The policy network architecture follows a standard design, with a visual encoder to process the input video and a control decoder to output motor commands. The key difference is that the policy is trained not just on the original human demonstration videos, but also on the synthetic videos generated by the [link to "human-demonstrations" paper] model.
Through extensive experiments, the authors show that this approach allows the policy network to learn highly generalizable skills that can be transferred to new variations of the task and even to real-world robot platforms. The benefit of this approach is that it enables robots to learn complex manipulation skills from very limited data, by leveraging the power of generative models to expand the training distribution.
Critical Analysis
One potential limitation of the Dreamitate approach is the reliance on a high-quality generative video model. If the model fails to accurately capture the dynamics and variations of the task, the synthetic training data it generates may not be representative of the real-world scenarios the robot needs to handle. The authors acknowledge this issue and discuss potential ways to mitigate it, such as using more robust generative models or incorporating additional constraints during the training process.
Another concern is the potential for the policy network to overfit to the synthetic data and fail to generalize to real-world situations. The authors attempt to address this by carefully curating the dataset of human demonstration videos and applying various data augmentation techniques. However, there may be inherent limitations to how well synthetic data can substitute for real-world experience, particularly for complex tasks involving physical interaction with the environment.
Despite these caveats, the Dreamitate approach represents an intriguing and promising direction for enabling robots to learn from limited real-world data. By leveraging the power of generative models, the method has the potential to significantly reduce the data and time required for robots to acquire new skills, which could have important implications for the field of [link to "view-visual-imitation-learning" paper] and the broader goal of developing more capable and adaptable robotic systems.
Conclusion
The Dreamitate method presented in this paper offers a novel approach to learning real-world visuomotor policies from video data. By using a generative video model to synthesize additional training examples, the authors demonstrate that robots can learn complex manipulation skills from just a single human demonstration. This approach has the potential to greatly reduce the data and time required for robots to acquire new capabilities, which could have significant implications for the field of [link to "view-visual-imitation-learning" paper] and the development of more versatile and adaptable robotic systems.
While the method has some limitations, the authors' work represents an important step forward in bridging the gap between human demonstrations and robotic skill acquisition. As the field of [link to "view-visual-imitation-learning" paper] continues to evolve, the Dreamitate approach and similar techniques could play a key role in enabling robots to learn from the rich visual knowledge that humans possess, ultimately leading to more capable and natural-
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Vision-based Manipulation from Single Human Video with Open-World Object Graphs
Yifeng Zhu, Arisrei Lim, Peter Stone, Yuke Zhu
0
0
We present an object-centric approach to empower robots to learn vision-based manipulation skills from human videos. We investigate the problem of imitating robot manipulation from a single human video in the open-world setting, where a robot must learn to manipulate novel objects from one video demonstration. We introduce ORION, an algorithm that tackles the problem by extracting an object-centric manipulation plan from a single RGB-D video and deriving a policy that conditions on the extracted plan. Our method enables the robot to learn from videos captured by daily mobile devices such as an iPad and generalize the policies to deployment environments with varying visual backgrounds, camera angles, spatial layouts, and novel object instances. We systematically evaluate our method on both short-horizon and long-horizon tasks, demonstrating the efficacy of ORION in learning from a single human video in the open world. Videos can be found in the project website https://ut-austin-rpl.github.io/ORION-release.
5/31/2024
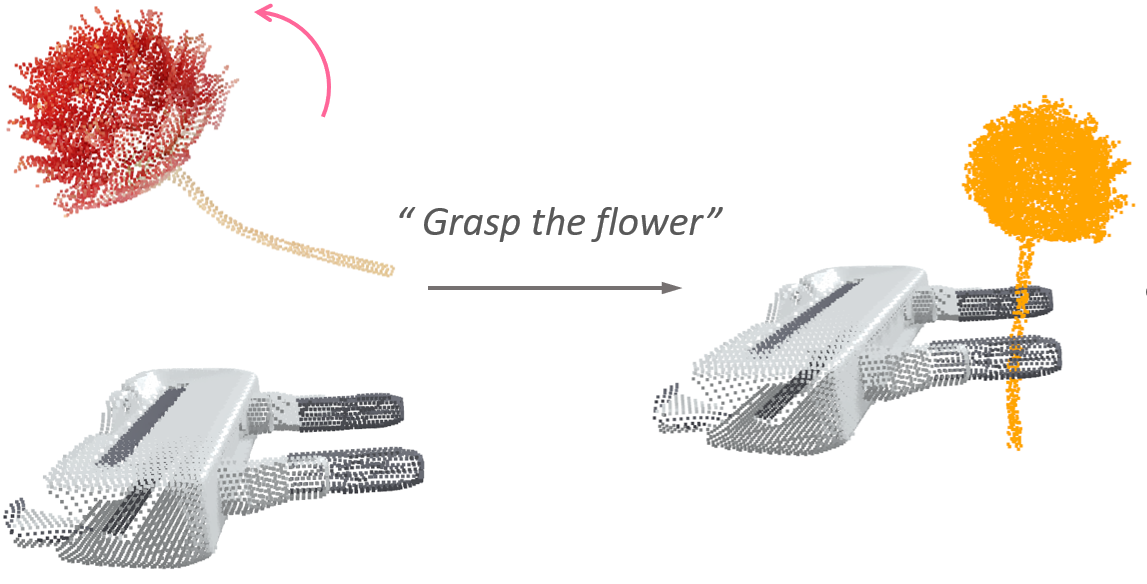
Imagination Policy: Using Generative Point Cloud Models for Learning Manipulation Policies
Haojie Huang, Karl Schmeckpeper, Dian Wang, Ondrej Biza, Yaoyao Qian, Haotian Liu, Mingxi Jia, Robert Platt, Robin Walters
0
0
Humans can imagine goal states during planning and perform actions to match those goals. In this work, we propose Imagination Policy, a novel multi-task key-frame policy network for solving high-precision pick and place tasks. Instead of learning actions directly, Imagination Policy generates point clouds to imagine desired states which are then translated to actions using rigid action estimation. This transforms action inference into a local generative task. We leverage pick and place symmetries underlying the tasks in the generation process and achieve extremely high sample efficiency and generalizability to unseen configurations. Finally, we demonstrate state-of-the-art performance across various tasks on the RLbench benchmark compared with several strong baselines.
6/18/2024
📉
MoDem-V2: Visuo-Motor World Models for Real-World Robot Manipulation
Patrick Lancaster, Nicklas Hansen, Aravind Rajeswaran, Vikash Kumar
0
0
Robotic systems that aspire to operate in uninstrumented real-world environments must perceive the world directly via onboard sensing. Vision-based learning systems aim to eliminate the need for environment instrumentation by building an implicit understanding of the world based on raw pixels, but navigating the contact-rich high-dimensional search space from solely sparse visual reward signals significantly exacerbates the challenge of exploration. The applicability of such systems is thus typically restricted to simulated or heavily engineered environments since agent exploration in the real-world without the guidance of explicit state estimation and dense rewards can lead to unsafe behavior and safety faults that are catastrophic. In this study, we isolate the root causes behind these limitations to develop a system, called MoDem-V2, capable of learning contact-rich manipulation directly in the uninstrumented real world. Building on the latest algorithmic advancements in model-based reinforcement learning (MBRL), demo-bootstrapping, and effective exploration, MoDem-V2 can acquire contact-rich dexterous manipulation skills directly in the real world. We identify key ingredients for leveraging demonstrations in model learning while respecting real-world safety considerations -- exploration centering, agency handover, and actor-critic ensembles. We empirically demonstrate the contribution of these ingredients in four complex visuo-motor manipulation problems in both simulation and the real world. To the best of our knowledge, our work presents the first successful system for demonstration-augmented visual MBRL trained directly in the real world. Visit https://sites.google.com/view/modem-v2 for videos and more details.
5/14/2024

Manipulate-Anything: Automating Real-World Robots using Vision-Language Models
Jiafei Duan, Wentao Yuan, Wilbert Pumacay, Yi Ru Wang, Kiana Ehsani, Dieter Fox, Ranjay Krishna
0
0
Large-scale endeavors like RT-1 and widespread community efforts such as Open-X-Embodiment have contributed to growing the scale of robot demonstration data. However, there is still an opportunity to improve the quality, quantity, and diversity of robot demonstration data. Although vision-language models have been shown to automatically generate demonstration data, their utility has been limited to environments with privileged state information, they require hand-designed skills, and are limited to interactions with few object instances. We propose Manipulate-Anything, a scalable automated generation method for real-world robotic manipulation. Unlike prior work, our method can operate in real-world environments without any privileged state information, hand-designed skills, and can manipulate any static object. We evaluate our method using two setups. First, Manipulate-Anything successfully generates trajectories for all 5 real-world and 12 simulation tasks, significantly outperforming existing methods like VoxPoser. Second, Manipulate-Anything's demonstrations can train more robust behavior cloning policies than training with human demonstrations, or from data generated by VoxPoser and Code-As-Policies. We believe Manipulate-Anything can be the scalable method for both generating data for robotics and solving novel tasks in a zero-shot setting.
7/1/2024