DistGrid: Scalable Scene Reconstruction with Distributed Multi-resolution Hash Grid

0
Sign in to get full access
Overview
- Introduces a distributed algorithm called DistGrid for scalable scene reconstruction using multi-resolution hash grids
- Addresses the challenge of scaling neural radiance field (NeRF) models to large scenes by leveraging distributed computing
- Proposes a hierarchical data structure and efficient communication strategies to enable distributed training and inference of NeRF models
Plain English Explanation
The paper presents a new approach called DistGrid for reconstructing large-scale 3D scenes using neural radiance fields (NeRFs). NeRFs are a powerful technique for creating high-quality 3D models from images, but they can be computationally intensive, especially for large or complex scenes.
DistGrid aims to address this by using a distributed computing approach. It divides the 3D scene into a grid of smaller regions, and trains separate NeRF models for each region in parallel on different machines. This allows the system to scale to much larger scenes than a single NeRF model could handle.
The key innovation is the use of a multi-resolution hash grid data structure to efficiently represent and coordinate the different NeRF models. This hierarchical grid allows the system to quickly identify which NeRF model is responsible for rendering a particular part of the scene, and to blend the outputs of multiple models when necessary.
The paper also describes efficient communication strategies to enable the distributed NeRF models to share information and produce a cohesive 3D reconstruction. This includes techniques for aggregating the outputs of the individual NeRF models and handling view-dependent effects at the boundaries between regions.
Overall, DistGrid provides a scalable approach for building high-quality 3D models of large-scale scenes, by leveraging distributed computing to overcome the limitations of standard NeRF models. This could have applications in areas like virtual reality, robotics, and urban planning, where detailed 3D reconstructions of complex environments are important.
Technical Explanation
The key technical contributions of the DistGrid paper are:
-
Hierarchical Multi-resolution Hash Grid: DistGrid uses a multi-resolution hash grid data structure to partition the 3D scene into a hierarchy of regions. This allows the system to efficiently identify which NeRF model is responsible for rendering a particular part of the scene, and to blend the outputs of multiple models when necessary.
-
Distributed NeRF Training and Inference: The DistGrid system trains separate NeRF models for each region of the grid in parallel, using distributed computing resources. This enables scaling to much larger scenes than a single NeRF model could handle.
-
Efficient Communication Strategies: The paper describes techniques for aggregating the outputs of the individual NeRF models and handling view-dependent effects at the boundaries between regions. This includes methods for efficiently transmitting the necessary data between the distributed NeRF models.
The authors evaluate DistGrid on several large-scale 3D reconstruction benchmarks, demonstrating its ability to produce high-quality results while scaling to much larger scenes than previous NeRF-based approaches. They also show that DistGrid can achieve significant speedups in training and inference time by leveraging distributed computing.
Critical Analysis
The DistGrid paper presents a compelling approach for scaling NeRF-based 3D reconstruction to large-scale scenes. The use of a distributed, hierarchical data structure is a clever way to overcome the limitations of standard NeRF models, which can struggle with complex or expansive environments.
That said, the paper does not address some potential limitations and areas for further research:
-
Boundary Artifacts: While the authors describe techniques for handling view-dependent effects at region boundaries, it's not clear how well these methods work in practice. Visible seams or artifacts at the boundaries could be a concern, especially for applications that require seamless 3D models.
-
Load Balancing: The paper does not discuss how the system handles uneven distributions of scene complexity across the grid. If some regions require significantly more computation than others, this could lead to load imbalances and inefficiencies in the distributed training and inference.
-
Generalization: The evaluation in the paper focuses on specific 3D reconstruction benchmarks. It would be helpful to see how well DistGrid generalizes to a broader range of scene types and use cases, including dynamic or cluttered environments.
-
Comparison to Other Distributed NeRF Approaches: While the paper cites related work on distributed NeRF algorithms, it would be informative to see a more direct comparison to these alternative approaches, in terms of both technical implementation and empirical performance.
Overall, the DistGrid paper presents a promising step forward in scaling NeRF-based 3D reconstruction. Further research and experimentation could help address the remaining challenges and unlock the full potential of this distributed approach.
Conclusion
The DistGrid paper introduces a novel distributed algorithm for scalable scene reconstruction using multi-resolution hash grids and neural radiance fields (NeRFs). By partitioning the 3D scene into a hierarchical grid and training separate NeRF models in parallel, DistGrid can handle much larger and more complex environments than previous NeRF-based techniques.
The key innovations of DistGrid include the use of a multi-resolution hash grid data structure, efficient communication strategies for coordinating the distributed NeRF models, and techniques for blending the outputs of multiple models to produce a cohesive 3D reconstruction.
The authors demonstrate the effectiveness of DistGrid on several large-scale 3D reconstruction benchmarks, showing that it can achieve high-quality results while scaling to much larger scenes than standard NeRF models. This distributed approach could have significant implications for applications like virtual reality, robotics, and urban planning, where detailed 3D models of expansive environments are crucial.
While the paper highlights the strengths of DistGrid, it also identifies some potential limitations and areas for further research, such as handling boundary artifacts, load balancing, and generalization to a broader range of scene types. Continued advancements in distributed NeRF algorithms like DistGrid will be an important step towards realizing the full potential of neural 3D reconstruction at scale.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
DistGrid: Scalable Scene Reconstruction with Distributed Multi-resolution Hash Grid
Sidun Liu, Peng Qiao, Zongxin Ye, Wenyu Li, Yong Dou
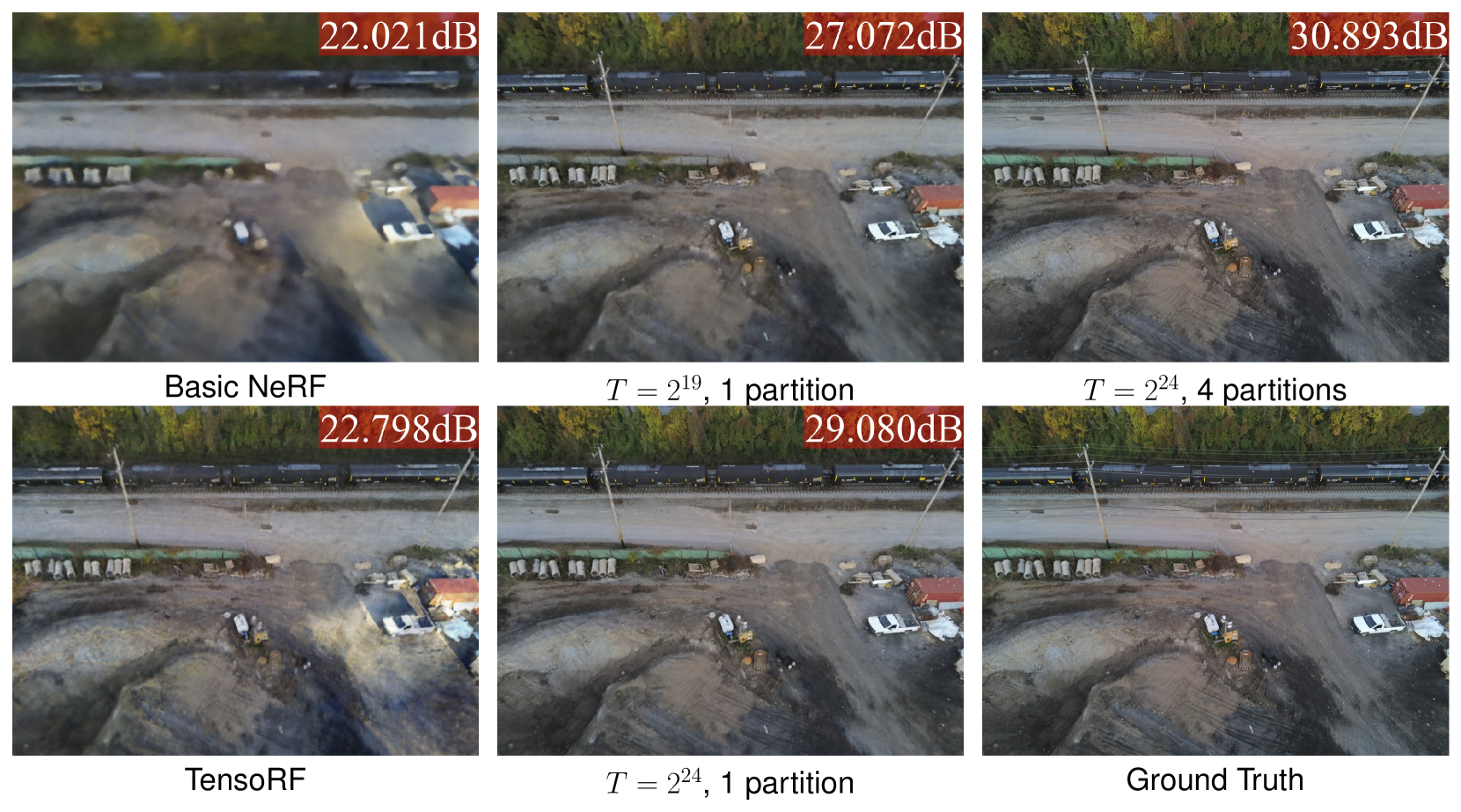
Neural Radiance Field~(NeRF) achieves extremely high quality in object-scaled and indoor scene reconstruction. However, there exist some challenges when reconstructing large-scale scenes. MLP-based NeRFs suffer from limited network capacity, while volume-based NeRFs are heavily memory-consuming when the scene resolution increases. Recent approaches propose to geographically partition the scene and learn each sub-region using an individual NeRF. Such partitioning strategies help volume-based NeRF exceed the single GPU memory limit and scale to larger scenes. However, this approach requires multiple background NeRF to handle out-of-partition rays, which leads to redundancy of learning. Inspired by the fact that the background of current partition is the foreground of adjacent partition, we propose a scalable scene reconstruction method based on joint Multi-resolution Hash Grids, named DistGrid. In this method, the scene is divided into multiple closely-paved yet non-overlapped Axis-Aligned Bounding Boxes, and a novel segmented volume rendering method is proposed to handle cross-boundary rays, thereby eliminating the need for background NeRFs. The experiments demonstrate that our method outperforms existing methods on all evaluated large-scale scenes, and provides visually plausible scene reconstruction. The scalability of our method on reconstruction quality is further evaluated qualitatively and quantitatively.
Read more5/9/2024

0
ASSR-NeRF: Arbitrary-Scale Super-Resolution on Voxel Grid for High-Quality Radiance Fields Reconstruction
Ding-Jiun Huang, Zi-Ting Chou, Yu-Chiang Frank Wang, Cheng Sun
NeRF-based methods reconstruct 3D scenes by building a radiance field with implicit or explicit representations. While NeRF-based methods can perform novel view synthesis (NVS) at arbitrary scale, the performance in high-resolution novel view synthesis (HRNVS) with low-resolution (LR) optimization often results in oversmoothing. On the other hand, single-image super-resolution (SR) aims to enhance LR images to HR counterparts but lacks multi-view consistency. To address these challenges, we propose Arbitrary-Scale Super-Resolution NeRF (ASSR-NeRF), a novel framework for super-resolution novel view synthesis (SRNVS). We propose an attention-based VoxelGridSR model to directly perform 3D super-resolution (SR) on the optimized volume. Our model is trained on diverse scenes to ensure generalizability. For unseen scenes trained with LR views, we then can directly apply our VoxelGridSR to further refine the volume and achieve multi-view consistent SR. We demonstrate quantitative and qualitatively that the proposed method achieves significant performance in SRNVS.
Read more7/1/2024

0
InterNeRF: Scaling Radiance Fields via Parameter Interpolation
Clinton Wang, Peter Hedman, Polina Golland, Jonathan T. Barron, Daniel Duckworth
Neural Radiance Fields (NeRFs) have unmatched fidelity on large, real-world scenes. A common approach for scaling NeRFs is to partition the scene into regions, each of which is assigned its own parameters. When implemented naively, such an approach is limited by poor test-time scaling and inconsistent appearance and geometry. We instead propose InterNeRF, a novel architecture for rendering a target view using a subset of the model's parameters. Our approach enables out-of-core training and rendering, increasing total model capacity with only a modest increase to training time. We demonstrate significant improvements in multi-room scenes while remaining competitive on standard benchmarks.
Read more6/18/2024
🧠
0
Multi-tiling Neural Radiance Field (NeRF) -- Geometric Assessment on Large-scale Aerial Datasets
Ningli Xu, Rongjun Qin, Debao Huang, Fabio Remondino
Neural Radiance Fields (NeRF) offer the potential to benefit 3D reconstruction tasks, including aerial photogrammetry. However, the scalability and accuracy of the inferred geometry are not well-documented for large-scale aerial assets,since such datasets usually result in very high memory consumption and slow convergence.. In this paper, we aim to scale the NeRF on large-scael aerial datasets and provide a thorough geometry assessment of NeRF. Specifically, we introduce a location-specific sampling technique as well as a multi-camera tiling (MCT) strategy to reduce memory consumption during image loading for RAM, representation training for GPU memory, and increase the convergence rate within tiles. MCT decomposes a large-frame image into multiple tiled images with different camera models, allowing these small-frame images to be fed into the training process as needed for specific locations without a loss of accuracy. We implement our method on a representative approach, Mip-NeRF, and compare its geometry performance with threephotgrammetric MVS pipelines on two typical aerial datasets against LiDAR reference data. Both qualitative and quantitative results suggest that the proposed NeRF approach produces better completeness and object details than traditional approaches, although as of now, it still falls short in terms of accuracy.
Read more6/7/2024