Distributed Artificial Intelligence as a Means to Achieve Self-X-Functions for Increasing Resilience: the First Steps
2404.06159
0
0
📶
Abstract
Using sensors as a means to achieve self-awareness and artificial intelligence for decision-making, may be a way to make complex systems self-adaptive, autonomous and resilient. Investigating the combination of distributed artificial intelligence methods and bio-inspired robotics can provide results that will be helpful for implementing autonomy of such robots and other complex systems. In this paper, we describe Distributed Artificial Intelligence application area, the most common examples of continuum robots and provide a description of our first steps towards implementing distributed control.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This paper explores the use of sensors and distributed artificial intelligence (AI) methods to create self-adaptive, autonomous, and resilient complex systems.
- The authors investigate the combination of distributed artificial intelligence methods and bio-inspired robotics to implement autonomy in robots and other complex systems.
- The paper describes the distributed AI application area and provides examples of continuum robots, as well as the first steps towards implementing distributed control.
Plain English Explanation
The paper explores using sensors and distributed artificial intelligence (AI) methods to create complex systems that can adapt, operate independently, and withstand changes on their own. The researchers investigate combining bio-inspired robotics and distributed AI techniques to make robots and other intricate systems more autonomous. The paper outlines the distributed AI field, gives examples of flexible "continuum" robots, and describes the initial steps towards implementing distributed control in these systems.
Technical Explanation
The paper explores the use of sensors and distributed artificial intelligence (AI) methods as a means to achieve self-awareness and decision-making capabilities in complex systems. This can potentially make such systems self-adaptive, autonomous, and resilient. The researchers investigate the combination of distributed AI and bio-inspired robotics to implement autonomy in robots and other complex systems.
The paper describes the distributed AI application area, providing examples of continuum robots, which are flexible, snake-like robots inspired by biological structures. The authors then outline their initial steps towards implementing distributed control in these robotic systems, leveraging the principles of distributed AI to enable autonomous decision-making and adaptation.
Critical Analysis
The paper presents a promising approach to enhancing the autonomy and resilience of complex systems through the integration of distributed AI and bio-inspired robotics. However, the research is still in its early stages, and the authors acknowledge the need for further development and testing to fully realize the potential of this approach.
One potential concern is the complexity of implementing distributed control in real-world systems, which may require overcoming significant technical challenges. Additionally, the authors do not address potential ethical or societal implications of deploying such autonomous systems, which is an important consideration as this technology advances.
Conclusion
This paper presents a novel approach to achieving self-awareness and autonomous decision-making in complex systems through the integration of distributed AI and bio-inspired robotics. The initial steps described in the paper lay the groundwork for further research and development in this area, which could lead to the creation of more adaptable, resilient, and autonomous systems. As the technology progresses, it will be crucial to consider the broader implications and potential societal impacts of such advancements.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌐
Intelligence and Motion Models of Continuum Robots: an Overview
Oxana Shamilyan, Ievgen Kabin, Zoya Dyka, Oleksandr Sudakov, Andrii Cherninskyi, Marcin Brzozowski, Peter Langendoerfer
0
0
Many technical solutions are bio-inspired. Octopus-inspired robotic arms belong to continuum robots which are used in minimally invasive surgery or for technical system restoration in areas difficult-toaccess. Continuum robot missions are bounded with their motions, whereby the motion of the robots is controlled by humans via wireless communication. In case of a lost connection, robot autonomy is required. Distributed control and distributed decision-making mechanisms based on artificial intelligence approaches can be a promising solution to achieve autonomy of technical systems and to increase their resilience. However these methods are not well investigated yet. Octopuses are the living example of natural distributed intelligence but their learning and decision-making mechanisms are also not fully investigated and understood yet. Our major interest is investigating mechanisms of Distributed Artificial Intelligence as a basis for improving resilience of complex systems. We decided to use a physical continuum robot prototype that is able to perform some basic movements for our research. The idea is to research how a technical system can be empowered to combine movements into sequences of motions by itself. For the experimental investigations a suitable physical prototype has to be selected, its motion control has to be implemented and automated. In this paper, we give an overview combining different fields of research, such as Distributed Artificial Intelligence and continuum robots based on 98 publications. We provide a detailed description of the basic motion control models of continuum robots based on the literature reviewed, discuss different aspects of autonomy and give an overview of physical prototypes of continuum robots.
4/10/2024
Synergising Human-like Responses and Machine Intelligence for Planning in Disaster Response
Savvas Papaioannou, Panayiotis Kolios, Christos G. Panayiotou, Marios M. Polycarpou
0
0
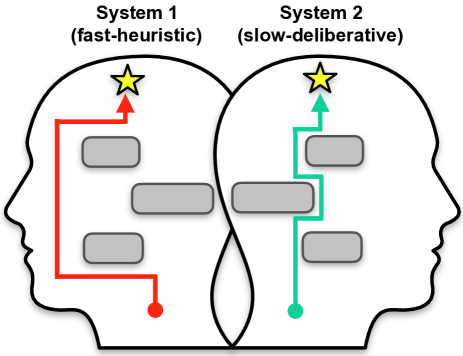
In the rapidly changing environments of disaster response, planning and decision-making for autonomous agents involve complex and interdependent choices. Although recent advancements have improved traditional artificial intelligence (AI) approaches, they often struggle in such settings, particularly when applied to agents operating outside their well-defined training parameters. To address these challenges, we propose an attention-based cognitive architecture inspired by Dual Process Theory (DPT). This framework integrates, in an online fashion, rapid yet heuristic (human-like) responses (System 1) with the slow but optimized planning capabilities of machine intelligence (System 2). We illustrate how a supervisory controller can dynamically determine in real-time the engagement of either system to optimize mission objectives by assessing their performance across a number of distinct attributes. Evaluated for trajectory planning in dynamic environments, our framework demonstrates that this synergistic integration effectively manages complex tasks by optimizing multiple mission objectives.
4/16/2024
🤖
New!Societal Adaptation to Advanced AI
Jamie Bernardi, Gabriel Mukobi, Hilary Greaves, Lennart Heim, Markus Anderljung
0
0
Existing strategies for managing risks from advanced AI systems often focus on affecting what AI systems are developed and how they diffuse. However, this approach becomes less feasible as the number of developers of advanced AI grows, and impedes beneficial use-cases as well as harmful ones. In response, we urge a complementary approach: increasing societal adaptation to advanced AI, that is, reducing the expected negative impacts from a given level of diffusion of a given AI capability. We introduce a conceptual framework which helps identify adaptive interventions that avoid, defend against and remedy potentially harmful uses of AI systems, illustrated with examples in election manipulation, cyberterrorism, and loss of control to AI decision-makers. We discuss a three-step cycle that society can implement to adapt to AI. Increasing society's ability to implement this cycle builds its resilience to advanced AI. We conclude with concrete recommendations for governments, industry, and third-parties.
5/17/2024
📉
Bridging Intelligence and Instinct: A New Control Paradigm for Autonomous Robots
Shimian Zhang, Qiuhong Lu
0
0
As the advent of artificial general intelligence (AGI) progresses at a breathtaking pace, the application of large language models (LLMs) as AI Agents in robotics remains in its nascent stage. A significant concern that hampers the seamless integration of these AI Agents into robotics is the unpredictability of the content they generate, a phenomena known as ``hallucination''. Drawing inspiration from biological neural systems, we propose a novel, layered architecture for autonomous robotics, bridging AI agent intelligence and robot instinct. In this context, we define Robot Instinct as the innate or learned set of responses and priorities in an autonomous robotic system that ensures survival-essential tasks, such as safety assurance and obstacle avoidance, are carried out in a timely and effective manner. This paradigm harmoniously combines the intelligence of LLMs with the instinct of robotic behaviors, contributing to a more safe and versatile autonomous robotic system. As a case study, we illustrate this paradigm within the context of a mobile robot, demonstrating its potential to significantly enhance autonomous robotics and enabling a future where robots can operate independently and safely across diverse environments.
5/1/2024