Embodied Neuromorphic Artificial Intelligence for Robotics: Perspectives, Challenges, and Research Development Stack
2404.03325
0
0
Abstract
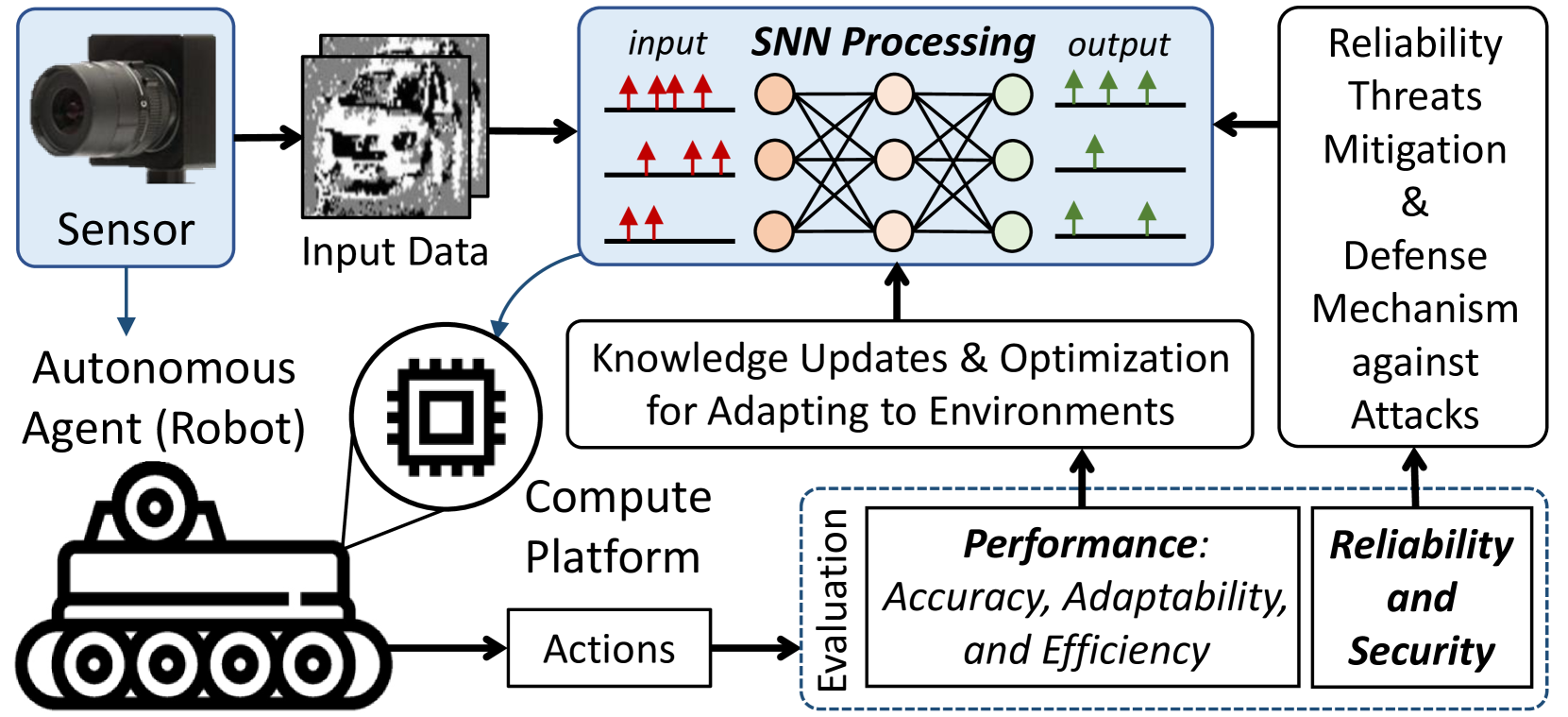
Robotic technologies have been an indispensable part for improving human productivity since they have been helping humans in completing diverse, complex, and intensive tasks in a fast yet accurate and efficient way. Therefore, robotic technologies have been deployed in a wide range of applications, ranging from personal to industrial use-cases. However, current robotic technologies and their computing paradigm still lack embodied intelligence to efficiently interact with operational environments, respond with correct/expected actions, and adapt to changes in the environments. Toward this, recent advances in neuromorphic computing with Spiking Neural Networks (SNN) have demonstrated the potential to enable the embodied intelligence for robotics through bio-plausible computing paradigm that mimics how the biological brain works, known as neuromorphic artificial intelligence (AI). However, the field of neuromorphic AI-based robotics is still at an early stage, therefore its development and deployment for solving real-world problems expose new challenges in different design aspects, such as accuracy, adaptability, efficiency, reliability, and security. To address these challenges, this paper will discuss how we can enable embodied neuromorphic AI for robotic systems through our perspectives: (P1) Embodied intelligence based on effective learning rule, training mechanism, and adaptability; (P2) Cross-layer optimizations for energy-efficient neuromorphic computing; (P3) Representative and fair benchmarks; (P4) Low-cost reliability and safety enhancements; (P5) Security and privacy for neuromorphic computing; and (P6) A synergistic development for energy-efficient and robust neuromorphic-based robotics. Furthermore, this paper identifies research challenges and opportunities, as well as elaborates our vision for future research development toward embodied neuromorphic AI for robotics.
Create account to get full access
Overview
- This paper explores the potential of neuromorphic artificial intelligence (AI) for robotics, discussing the perspectives, challenges, and research development stack.
- It examines the integration of neuromorphic computing and AI-powered systems in embodied robotic platforms, aiming to advance the field of robotics.
- The research highlights the benefits of neuromorphic AI for improved energy efficiency, real-time processing, and more human-like cognitive capabilities in robots.
- The paper also outlines the key technical and conceptual components required to develop this emerging field, including hardware, software, and algorithms.
Plain English Explanation
Neuromorphic AI is a form of artificial intelligence that is inspired by the structure and function of the human brain. Instead of traditional computer chips, neuromorphic systems use specialized hardware that mimics the way neurons and synapses work in the brain. This allows them to process information more efficiently and in a more natural, human-like way.
The researchers in this paper believe that integrating neuromorphic AI with robotic systems could lead to some exciting advancements. Robots powered by neuromorphic AI could potentially be more energy-efficient, process information in real-time, and even develop cognitive abilities that are more similar to humans. This could enable robots to interact with the world and with people in more intuitive and natural ways.
However, developing this kind of neuromorphic robotics is not a simple task. The paper outlines the various technical and conceptual components that need to be put in place, including specialized hardware, software, and algorithms. The researchers also discuss the key challenges and hurdles that need to be overcome to make neuromorphic AI-powered robots a reality.
Overall, the paper presents a vision for the future of robotics, where machines are imbued with brain-like intelligence and capabilities. While there is still a lot of work to be done, the potential benefits of this approach, such as improved energy efficiency and more natural human-robot interactions, make it a promising area of research.
Technical Explanation
The paper begins by discussing the motivations and potential benefits of integrating neuromorphic computing and AI-powered systems into embodied robotic platforms. Neuromorphic AI, which is inspired by the structure and function of the human brain, offers several advantages over traditional computer architectures, including improved energy efficiency, real-time processing capabilities, and more human-like cognitive abilities.
The researchers then outline the key technical and conceptual components required to develop this emerging field of neuromorphic robotics. This includes hardware, such as specialized neuromorphic chips and sensors, as well as software and algorithms designed to leverage the unique properties of neuromorphic systems. The paper also explores the challenges and research questions that need to be addressed, such as the development of robust learning algorithms, efficient power management, and the integration of neuromorphic components with traditional robotics systems.
To illustrate the potential of this approach, the paper discusses several use cases and application scenarios, such as the implementation of neuromorphic AI in robotic platforms for navigation, object recognition, and human-robot interaction. The researchers argue that the integration of neuromorphic computing and AI can lead to significant advancements in the field of robotics, enabling the development of more efficient, intelligent, and adaptable robotic systems.
Critical Analysis
The paper provides a comprehensive overview of the current state of neuromorphic AI-based robotics and highlights the promising potential of this approach. However, the authors also acknowledge the significant technical and conceptual challenges that need to be overcome to realize this vision.
One key challenge mentioned in the paper is the integration of neuromorphic components with traditional robotics systems. While the potential benefits of neuromorphic AI are clear, seamlessly integrating these systems with existing hardware and software architectures may require substantial engineering efforts and compatibility issues.
Additionally, the paper notes that the development of robust learning algorithms and efficient power management solutions are critical for the successful deployment of neuromorphic robotics in real-world applications. The ability of these systems to adapt and learn in dynamic environments, while maintaining energy efficiency, will be a crucial factor in their widespread adoption.
The paper also highlights the need for further research in areas such as the scalability of neuromorphic architectures, the interpretation and explainability of neuromorphic AI decision-making, and the ethical implications of deploying these systems in real-world settings. As the field of neuromorphic robotics continues to evolve, addressing these challenges will be essential to ensure the responsible and effective development of this technology.
Conclusion
This paper presents a compelling vision for the future of robotics, where the integration of neuromorphic AI can lead to significant advancements in energy efficiency, real-time processing, and human-like cognitive capabilities. By outlining the key technical and conceptual components required to develop this emerging field, the researchers have provided a valuable roadmap for researchers and engineers working in this area.
While the challenges and hurdles are substantial, the potential benefits of neuromorphic robotics, such as more natural human-robot interactions and the ability to operate in complex environments, make this a promising area of research. As the field continues to evolve, addressing the technical, conceptual, and ethical considerations will be crucial to ensuring the responsible and effective development of this technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌀
Embedded Silicon-Organic Integrated Neuromorphic System
Shengjie Zheng, Ling Liu, Junjie Yang, Jianwei Zhang, Tao Su, Bin Yue, Xiaojian Li
0
0
The development of artificial intelligence (AI) and robotics are both based on the tenet of science and technology are people-oriented, and both need to achieve efficient communication with the human brain. Based on multi-disciplinary research in systems neuroscience, computer architecture, and functional organic materials, we proposed the concept of using AI to simulate the operating principles and materials of the brain in hardware to develop brain-inspired intelligence technology, and realized the preparation of neuromorphic computing devices and basic materials. We simulated neurons and neural networks in terms of material and morphology, using a variety of organic polymers as the base materials for neuroelectronic devices, for building neural interfaces as well as organic neural devices and silicon neural computational modules. We assemble organic artificial synapses with simulated neurons from silicon-based Field-Programmable Gate Array (FPGA) into organic artificial neurons, the basic components of neural networks, and later construct biological neural network models based on the interpreted neural circuits. Finally, we also discuss how to further build neuromorphic devices based on these organic artificial neurons, which have both a neural interface friendly to nervous tissue and interact with information from real biological neural networks.
6/27/2024
🐍
Towards Reverse-Engineering the Brain: Brain-Derived Neuromorphic Computing Approach with Photonic, Electronic, and Ionic Dynamicity in 3D integrated circuits
S. J. Ben Yoo, Luis El-Srouji, Suman Datta, Shimeng Yu, Jean Anne Incorvia, Alberto Salleo, Volker Sorger, Juejun Hu, Lionel C Kimerling, Kristofer Bouchard, Joy Geng, Rishidev Chaudhuri, Charan Ranganath, Randall O'Reilly
0
0
The human brain has immense learning capabilities at extreme energy efficiencies and scale that no artificial system has been able to match. For decades, reverse engineering the brain has been one of the top priorities of science and technology research. Despite numerous efforts, conventional electronics-based methods have failed to match the scalability, energy efficiency, and self-supervised learning capabilities of the human brain. On the other hand, very recent progress in the development of new generations of photonic and electronic memristive materials, device technologies, and 3D electronic-photonic integrated circuits (3D EPIC ) promise to realize new brain-derived neuromorphic systems with comparable connectivity, density, energy-efficiency, and scalability. When combined with bio-realistic learning algorithms and architectures, it may be possible to realize an 'artificial brain' prototype with general self-learning capabilities. This paper argues the possibility of reverse-engineering the brain through architecting a prototype of a brain-derived neuromorphic computing system consisting of artificial electronic, ionic, photonic materials, devices, and circuits with dynamicity resembling the bio-plausible molecular, neuro/synaptic, neuro-circuit, and multi-structural hierarchical macro-circuits of the brain based on well-tested computational models. We further argue the importance of bio-plausible local learning algorithms applicable to the neuromorphic computing system that capture the flexible and adaptive unsupervised and self-supervised learning mechanisms central to human intelligence. Most importantly, we emphasize that the unique capabilities in brain-derived neuromorphic computing prototype systems will enable us to understand links between specific neuronal and network-level properties with system-level functioning and behavior.
4/1/2024
🤖
Neuromorphic hardware for sustainable AI data centers
Bernhard Vogginger, Amirhossein Rostami, Vaibhav Jain, Sirine Arfa, Andreas Hantsch, David Kappel, Michael Schafer, Ulrike Faltings, Hector A. Gonzalez, Chen Liu, Christian Mayr, Wolfgang Maa{ss}
0
0
As humans advance toward a higher level of artificial intelligence, it is always at the cost of escalating computational resource consumption, which requires developing novel solutions to meet the exponential growth of AI computing demand. Neuromorphic hardware takes inspiration from how the brain processes information and promises energy-efficient computing of AI workloads. Despite its potential, neuromorphic hardware has not found its way into commercial AI data centers. In this article, we try to analyze the underlying reasons for this and derive requirements and guidelines to promote neuromorphic systems for efficient and sustainable cloud computing: We first review currently available neuromorphic hardware systems and collect examples where neuromorphic solutions excel conventional AI processing on CPUs and GPUs. Next, we identify applications, models and algorithms which are commonly deployed in AI data centers as further directions for neuromorphic algorithms research. Last, we derive requirements and best practices for the hardware and software integration of neuromorphic systems into data centers. With this article, we hope to increase awareness of the challenges of integrating neuromorphic hardware into data centers and to guide the community to enable sustainable and energy-efficient AI at scale.
6/28/2024

A Neuromorphic Approach to Obstacle Avoidance in Robot Manipulation
Ahmed Faisal Abdelrahman, Matias Valdenegro-Toro, Maren Bennewitz, Paul G. Ploger
0
0
Neuromorphic computing mimics computational principles of the brain in $textit{silico}$ and motivates research into event-based vision and spiking neural networks (SNNs). Event cameras (ECs) exclusively capture local intensity changes and offer superior power consumption, response latencies, and dynamic ranges. SNNs replicate biological neuronal dynamics and have demonstrated potential as alternatives to conventional artificial neural networks (ANNs), such as in reducing energy expenditure and inference time in visual classification. Nevertheless, these novel paradigms remain scarcely explored outside the domain of aerial robots. To investigate the utility of brain-inspired sensing and data processing, we developed a neuromorphic approach to obstacle avoidance on a camera-equipped manipulator. Our approach adapts high-level trajectory plans with reactive maneuvers by processing emulated event data in a convolutional SNN, decoding neural activations into avoidance motions, and adjusting plans using a dynamic motion primitive. We conducted experiments with a Kinova Gen3 arm performing simple reaching tasks that involve obstacles in sets of distinct task scenarios and in comparison to a non-adaptive baseline. Our neuromorphic approach facilitated reliable avoidance of imminent collisions in simulated and real-world experiments, where the baseline consistently failed. Trajectory adaptations had low impacts on safety and predictability criteria. Among the notable SNN properties were the correlation of computations with the magnitude of perceived motions and a robustness to different event emulation methods. Tests with a DAVIS346 EC showed similar performance, validating our experimental event emulation. Our results motivate incorporating SNN learning, utilizing neuromorphic processors, and further exploring the potential of neuromorphic methods.
4/10/2024