Distributed online constrained convex optimization with event-triggered communication
2311.01957
0
0
🛠️
Abstract
This paper focuses on the distributed online convex optimization problem with time-varying inequality constraints over a network of agents, where each agent collaborates with its neighboring agents to minimize the cumulative network-wide loss over time. To reduce communication overhead between the agents, we propose a distributed event-triggered online primal-dual algorithm over a time-varying directed graph. With several classes of appropriately chose decreasing parameter sequences and non-increasing event-triggered threshold sequences, we establish dynamic network regret and network cumulative constraint violation bounds. Finally, a numerical simulation example is provided to verify the theoretical results.
Create account to get full access
Overview
- This paper explores a distributed online convex optimization problem with time-varying inequality constraints over a network of agents.
- The goal is for each agent to collaborate with its neighbors to minimize the cumulative network-wide loss over time.
- To reduce communication overhead, the authors propose a distributed event-triggered online primal-dual algorithm over a time-varying directed graph.
- The paper establishes bounds on dynamic network regret and network cumulative constraint violation under certain parameter conditions.
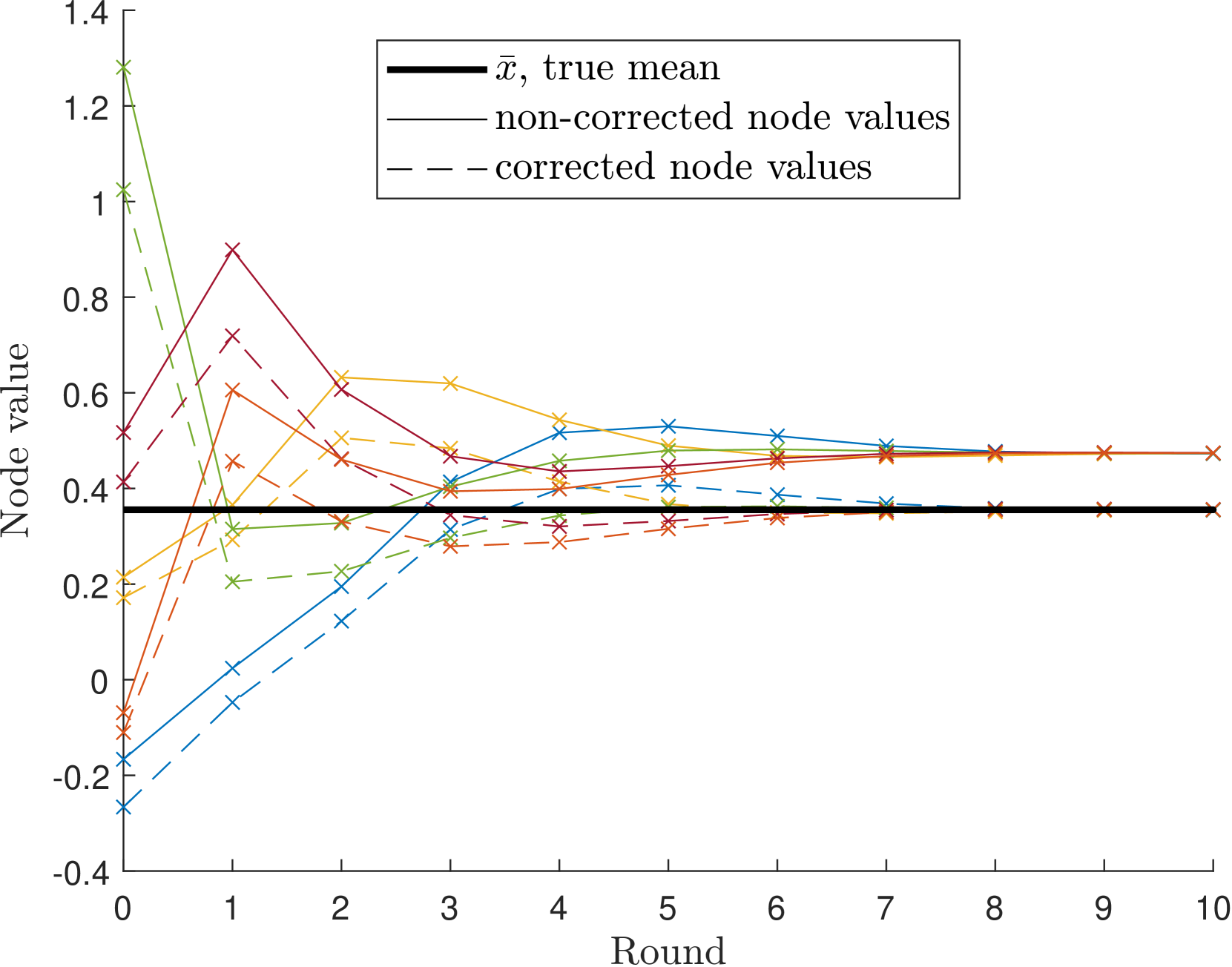
- A numerical simulation is provided to verify the theoretical results.
Plain English Explanation
In this research, the authors look at a problem where a group of interconnected agents (like computers or sensors) need to work together to minimize a shared cost over time. Each agent has its own local constraints that can change over time. To solve this problem efficiently, the researchers developed a new algorithm that allows the agents to communicate and coordinate with their neighbors in the network, but only when necessary.
This "event-triggered" approach reduces the amount of communication required compared to having the agents exchange information continuously. The paper provides mathematical guarantees on how well this algorithm performs in terms of minimizing the overall cost and satisfying the time-varying constraints, as long as the parameters are chosen carefully. The researchers also demonstrate the effectiveness of their approach through computer simulations.
The key idea is to enable a group of interconnected agents to collaboratively optimize a shared objective while respecting their individual constraints, using an efficient communication strategy. This could be applicable to problems like distributed resource allocation, coordinated control of robotic systems, or decentralized optimization in sensor networks.
Technical Explanation
The paper formulates a distributed online convex optimization problem where a network of agents collaborate to minimize the cumulative network-wide loss over time, subject to time-varying local inequality constraints.
To reduce the communication overhead, the authors propose a distributed event-triggered online primal-dual algorithm. In this approach, each agent updates its decision variables based on information from its neighbors, but only triggers a communication event when necessary according to a predefined threshold. This allows the agents to coordinate their actions while significantly reducing the number of messages exchanged.
The researchers establish dynamic network regret and network cumulative constraint violation bounds for their algorithm under several classes of decreasing parameter sequences and non-increasing event-triggered threshold sequences. These theoretical guarantees ensure that the algorithm can closely track the optimal solution while satisfying the time-varying constraints.
A numerical simulation example is provided to validate the theoretical findings. The results demonstrate the effectiveness of the event-triggered approach in minimizing the network-wide loss and constraint violation compared to a continuous communication strategy.
Critical Analysis
The paper presents a well-designed and theoretically-grounded solution to the distributed online convex optimization problem with time-varying constraints. The event-triggered communication strategy is a clever way to reduce the coordination overhead while maintaining strong performance guarantees.
One potential limitation is that the analysis assumes the graph topology is time-varying but deterministic. It would be interesting to see how the algorithm and its theoretical properties extend to the case of stochastic graph dynamics, which may be more realistic in practical applications.
Additionally, the paper focuses on establishing regret and constraint violation bounds, but does not provide much insight into the practical implications or real-world use cases of the proposed approach. Further research could explore the application of this framework to concrete problems, such as distributed resource allocation, sensor network coordination, or multi-agent control, to better understand its advantages and limitations.
Overall, this is a technically solid contribution that advances the state-of-the-art in distributed optimization under time-varying constraints. The event-triggered communication strategy is a clever and promising approach that deserves further investigation and validation in practical settings.
Conclusion
This paper presents a distributed online convex optimization framework with time-varying inequality constraints, where a network of agents collaborate to minimize a shared objective. To reduce communication overhead, the authors propose an event-triggered online primal-dual algorithm that allows the agents to coordinate their actions without constantly exchanging information.
The theoretical analysis establishes regret and constraint violation bounds for the proposed algorithm under various parameter settings, demonstrating its ability to closely track the optimal solution while satisfying the time-varying local constraints. The numerical simulations further validate the effectiveness of the event-triggered approach.
This research contributes valuable insights to the field of distributed optimization and has the potential to enable more efficient coordination in a wide range of applications, such as distributed resource allocation, multi-agent control, and sensor network management. By striking a balance between communication and optimization performance, the event-triggered strategy offers a promising direction for developing scalable and robust distributed optimization algorithms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Robust Constrained Consensus and Inequality-constrained Distributed Optimization with Guaranteed Differential Privacy and Accurate Convergence
Yongqiang Wang, Angelia Nedic
0
0
We address differential privacy for fully distributed optimization subject to a shared inequality constraint. By co-designing the distributed optimization mechanism and the differential-privacy noise injection mechanism, we propose the first distributed constrained optimization algorithm that can ensure both provable convergence to a global optimal solution and rigorous $epsilon$-differential privacy, even when the number of iterations tends to infinity. Our approach does not require the Lagrangian function to be strictly convex/concave, and allows the global objective function to be non-separable. As a byproduct of the co-design, we also propose a new constrained consensus algorithm that can achieve rigorous $epsilon$-differential privacy while maintaining accurate convergence, which, to our knowledge, has not been achieved before. Numerical simulation results on a demand response control problem in smart grid confirm the effectiveness of the proposed approach.
4/4/2024
🛠️
Lower Bounds and Optimal Algorithms for Non-Smooth Convex Decentralized Optimization over Time-Varying Networks
Dmitry Kovalev, Ekaterina Borodich, Alexander Gasnikov, Dmitrii Feoktistov
0
0
We consider the task of minimizing the sum of convex functions stored in a decentralized manner across the nodes of a communication network. This problem is relatively well-studied in the scenario when the objective functions are smooth, or the links of the network are fixed in time, or both. In particular, lower bounds on the number of decentralized communications and (sub)gradient computations required to solve the problem have been established, along with matching optimal algorithms. However, the remaining and most challenging setting of non-smooth decentralized optimization over time-varying networks is largely underexplored, as neither lower bounds nor optimal algorithms are known in the literature. We resolve this fundamental gap with the following contributions: (i) we establish the first lower bounds on the communication and subgradient computation complexities of solving non-smooth convex decentralized optimization problems over time-varying networks; (ii) we develop the first optimal algorithm that matches these lower bounds and offers substantially improved theoretical performance compared to the existing state of the art.
5/29/2024
🛠️
A cutting-surface consensus approach for distributed robust optimization of multi-agent systems
Jun Fu, Xunhao Wu
0
0
A novel and fully distributed optimization method is proposed for the distributed robust convex program (DRCP) over a time-varying unbalanced directed network under the uniformly jointly strongly connected (UJSC) assumption. Firstly, a tractable approximated DRCP (ADRCP) is introduced by discretizing the semi-infinite constraints into a finite number of inequality constraints and restricting the right-hand side of the constraints with a positive parameter. This problem is iteratively solved by a distributed projected gradient algorithm proposed in this paper, which is based on epigraphic reformulation and subgradient projected algorithms. Secondly, a cutting-surface consensus approach is proposed for locating an approximately optimal consensus solution of the DRCP with guaranteed feasibility. This approach is based on iteratively approximating the DRCP by successively reducing the restriction parameter of the right-hand constraints and populating the cutting-surfaces into the existing finite set of constraints. Thirdly, to ensure finite-time termination of the distributed optimization, a distributed termination algorithm is developed based on consensus and zeroth-order stopping conditions under UJSC graphs. Fourthly, it is proved that the cutting-surface consensus approach terminates finitely and yields a feasible and approximate optimal solution for each agent. Finally, the effectiveness of the approach is illustrated through a numerical example.
6/18/2024
Decentralized Optimization in Time-Varying Networks with Arbitrary Delays
Tomas Ortega, Hamid Jafarkhani
0
0
We consider a decentralized optimization problem for networks affected by communication delays. Examples of such networks include collaborative machine learning, sensor networks, and multi-agent systems. To mimic communication delays, we add virtual non-computing nodes to the network, resulting in directed graphs. This motivates investigating decentralized optimization solutions on directed graphs. Existing solutions assume nodes know their out-degrees, resulting in limited applicability. To overcome this limitation, we introduce a novel gossip-based algorithm, called DT-GO, that does not need to know the out-degrees. The algorithm is applicable in general directed networks, for example networks with delays or limited acknowledgment capabilities. We derive convergence rates for both convex and non-convex objectives, showing that our algorithm achieves the same complexity order as centralized Stochastic Gradient Descent. In other words, the effects of the graph topology and delays are confined to higher-order terms. Additionally, we extend our analysis to accommodate time-varying network topologies. Numerical simulations are provided to support our theoretical findings.
5/31/2024