Distributed Stochastic Optimization of a Neural Representation Network for Time-Space Tomography Reconstruction

0
🛠️
Sign in to get full access
Overview
- Presents a novel approach for 4D time-space reconstruction of dynamic events or deforming objects using X-ray computed tomography (CT)
- Addresses the limitations of existing methods that assume static objects during data acquisition
- Proposes a Distributed Implicit Neural Representation (DINR) network trained with a novel distributed stochastic algorithm
- Leverages continuous time and space forward measurement models to enable high-fidelity 4D reconstructions from large CT datasets
Plain English Explanation
The paper tackles the challenge of reconstructing the 4D (3D space + time) structure of dynamic objects or events using X-ray computed tomography (CT) scans. Existing methods for this task often assume the object being imaged remains static during the entire data acquisition process, which can lead to inaccurate reconstructions and unwanted artifacts when this assumption is violated.
To address this, the researchers developed a Distributed Implicit Neural Representation (DINR) network that can learn to reconstruct the 4D structure of the object from the CT scan data. Unlike previous neural network approaches that operate on dense voxel grids covering the entire space-time domain, DINR only computes the reconstruction at a sparse set of selected points. This allows for a significant reduction in memory and computational requirements, enabling the network to handle very large CT datasets.
The key innovation is the use of a continuous time and space forward measurement model that is integrated with the DINR network. This allows the network to be trained more efficiently by only performing calculations at the specific points needed to match the measured CT projection images, rather than the entire 4D volume.
The researchers demonstrate the effectiveness of their approach using both simulated and real-world experimental CT datasets, showing that DINR can produce high-fidelity 4D reconstructions of dynamic objects and events.
Technical Explanation
The paper presents a novel approach for performing 4D time-space reconstruction of dynamic events or deforming objects using X-ray computed tomography (CT). Existing methods for this task typically assume that the object remains static during the entire data acquisition process, which involves capturing numerous X-ray projection images over time. This assumption is often violated in many in-situ experiments, leading to spurious artifacts and inaccurate morphological reconstructions.
To address this problem, the researchers propose a Distributed Implicit Neural Representation (DINR) network that is trained using a novel distributed stochastic training algorithm. The DINR network learns to reconstruct the object by iteratively optimizing its network parameters to ensure that the measured projection images best match the output of the CT forward measurement model.
Unlike existing neural representation architectures that operate on dense voxel grids covering the entire time-space domain, the DINR network only computes the reconstruction at a sparse set of selected object coordinates. This allows for an order-of-magnitude reduction in memory and computational requirements, enabling the network to handle very large CT datasets.
The key innovation in this approach is the use of a continuous time and space forward measurement model that is integrated with the DINR network. This model serves as a function of the DINR outputs at the sparsely sampled object coordinates, allowing the network to be trained more efficiently by only performing calculations at the specific points needed to match the measured CT projection images.
The researchers demonstrate the performance of their approach using both simulated parallel-beam and experimental cone-beam X-ray CT datasets. Their results show that the DINR network can produce high-fidelity 4D time-space reconstructions, even for extremely large CT data sizes, by leveraging distributed computation across multiple compute nodes and GPUs.
Critical Analysis
The paper presents a promising approach for addressing the challenge of 4D time-space reconstruction of dynamic objects or events using X-ray CT. The use of a Distributed Implicit Neural Representation (DINR) network and the integration of a continuous time and space forward measurement model are notable innovations that enable efficient and accurate reconstructions, even for very large CT datasets.
However, the paper does not provide a detailed discussion of the limitations or potential drawbacks of the proposed method. For example, it would be helpful to understand the sensitivity of the approach to factors such as noise, artifacts, or irregularities in the CT projection data, as these are common challenges in real-world experimental settings.
Additionally, the paper could benefit from a more thorough comparison to other state-of-the-art techniques for 4D reconstruction, such as endoscopic monocular scene reconstruction, dynamic neural fields for LiDAR, or space-variant total variation approaches. This would help readers better understand the unique advantages and potential limitations of the DINR-based approach.
Overall, the paper presents a novel and promising solution to the problem of 4D time-space reconstruction from CT data. Further research and validation, particularly in more realistic experimental settings, would help strengthen the claims and establish the practical utility of the proposed novel spike transformer network for depth estimation.
Conclusion
This paper introduces a novel approach for 4D time-space reconstruction of dynamic events or deforming objects using X-ray computed tomography (CT). The key innovation is the use of a Distributed Implicit Neural Representation (DINR) network that is trained with a novel distributed stochastic algorithm and leverages a continuous time and space forward measurement model.
By only computing the reconstruction at a sparse set of selected object coordinates, the DINR network can handle very large CT datasets with a significant reduction in memory and computational requirements compared to previous neural representation architectures. The researchers demonstrate the effectiveness of their approach using both simulated and experimental CT data, showcasing the ability to produce high-fidelity 4D time-space reconstructions.
The proposed method represents an important step forward in addressing the challenge of 4D reconstruction from CT data, with potential applications in fields such as materials science, biomedical imaging, and in-situ experimentation. Further research and validation, particularly in realistic experimental settings, will be crucial to fully establish the practical utility and limitations of this approach.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛠️
0
Distributed Stochastic Optimization of a Neural Representation Network for Time-Space Tomography Reconstruction
K. Aditya Mohan, Massimiliano Ferrucci, Chuck Divin, Garrett A. Stevenson, Hyojin Kim
4D time-space reconstruction of dynamic events or deforming objects using X-ray computed tomography (CT) is an extremely ill-posed inverse problem. Existing approaches assume that the object remains static for the duration of several tens or hundreds of X-ray projection measurement images (reconstruction of consecutive limited-angle CT scans). However, this is an unrealistic assumption for many in-situ experiments that causes spurious artifacts and inaccurate morphological reconstructions of the object. To solve this problem, we propose to perform a 4D time-space reconstruction using a distributed implicit neural representation (DINR) network that is trained using a novel distributed stochastic training algorithm. Our DINR network learns to reconstruct the object at its output by iterative optimization of its network parameters such that the measured projection images best match the output of the CT forward measurement model. We use a continuous time and space forward measurement model that is a function of the DINR outputs at a sparsely sampled set of continuous valued object coordinates. Unlike existing state-of-the-art neural representation architectures that forward and back propagate through dense voxel grids that sample the object's entire time-space coordinates, we only propagate through the DINR at a small subset of object coordinates in each iteration resulting in an order-of-magnitude reduction in memory and compute for training. DINR leverages distributed computation across several compute nodes and GPUs to produce high-fidelity 4D time-space reconstructions even for extremely large CT data sizes. We use both simulated parallel-beam and experimental cone-beam X-ray CT datasets to demonstrate the superior performance of our approach.
Read more5/1/2024
🧠
0
Implicit Neural Representations for Robust Joint Sparse-View CT Reconstruction
Jiayang Shi, Junyi Zhu, Daniel M. Pelt, K. Joost Batenburg, Matthew B. Blaschko
Computed Tomography (CT) is pivotal in industrial quality control and medical diagnostics. Sparse-view CT, offering reduced ionizing radiation, faces challenges due to its under-sampled nature, leading to ill-posed reconstruction problems. Recent advancements in Implicit Neural Representations (INRs) have shown promise in addressing sparse-view CT reconstruction. Recognizing that CT often involves scanning similar subjects, we propose a novel approach to improve reconstruction quality through joint reconstruction of multiple objects using INRs. This approach can potentially leverage both the strengths of INRs and the statistical regularities across multiple objects. While current INR joint reconstruction techniques primarily focus on accelerating convergence via meta-initialization, they are not specifically tailored to enhance reconstruction quality. To address this gap, we introduce a novel INR-based Bayesian framework integrating latent variables to capture the inter-object relationships. These variables serve as a dynamic reference throughout the optimization, thereby enhancing individual reconstruction fidelity. Our extensive experiments, which assess various key factors such as reconstruction quality, resistance to overfitting, and generalizability, demonstrate significant improvements over baselines in common numerical metrics. This underscores a notable advancement in CT reconstruction methods.
Read more5/7/2024

0
DPER: Diffusion Prior Driven Neural Representation for Limited Angle and Sparse View CT Reconstruction
Chenhe Du, Xiyue Lin, Qing Wu, Xuanyu Tian, Ying Su, Zhe Luo, Rui Zheng, Yang Chen, Hongjiang Wei, S. Kevin Zhou, Jingyi Yu, Yuyao Zhang
Limited-angle and sparse-view computed tomography (LACT and SVCT) are crucial for expanding the scope of X-ray CT applications. However, they face challenges due to incomplete data acquisition, resulting in diverse artifacts in the reconstructed CT images. Emerging implicit neural representation (INR) techniques, such as NeRF, NeAT, and NeRP, have shown promise in under-determined CT imaging reconstruction tasks. However, the unsupervised nature of INR architecture imposes limited constraints on the solution space, particularly for the highly ill-posed reconstruction task posed by LACT and ultra-SVCT. In this study, we introduce the Diffusion Prior Driven Neural Representation (DPER), an advanced unsupervised framework designed to address the exceptionally ill-posed CT reconstruction inverse problems. DPER adopts the Half Quadratic Splitting (HQS) algorithm to decompose the inverse problem into data fidelity and distribution prior sub-problems. The two sub-problems are respectively addressed by INR reconstruction scheme and pre-trained score-based diffusion model. This combination first injects the implicit image local consistency prior from INR. Additionally, it effectively augments the feasibility of the solution space for the inverse problem through the generative diffusion model, resulting in increased stability and precision in the solutions. We conduct comprehensive experiments to evaluate the performance of DPER on LACT and ultra-SVCT reconstruction with two public datasets (AAPM and LIDC), an in-house clinical COVID-19 dataset and a public raw projection dataset created by Mayo Clinic. The results show that our method outperforms the state-of-the-art reconstruction methods on in-domain datasets, while achieving significant performance improvements on out-of-domain (OOD) datasets.
Read more7/22/2024
0
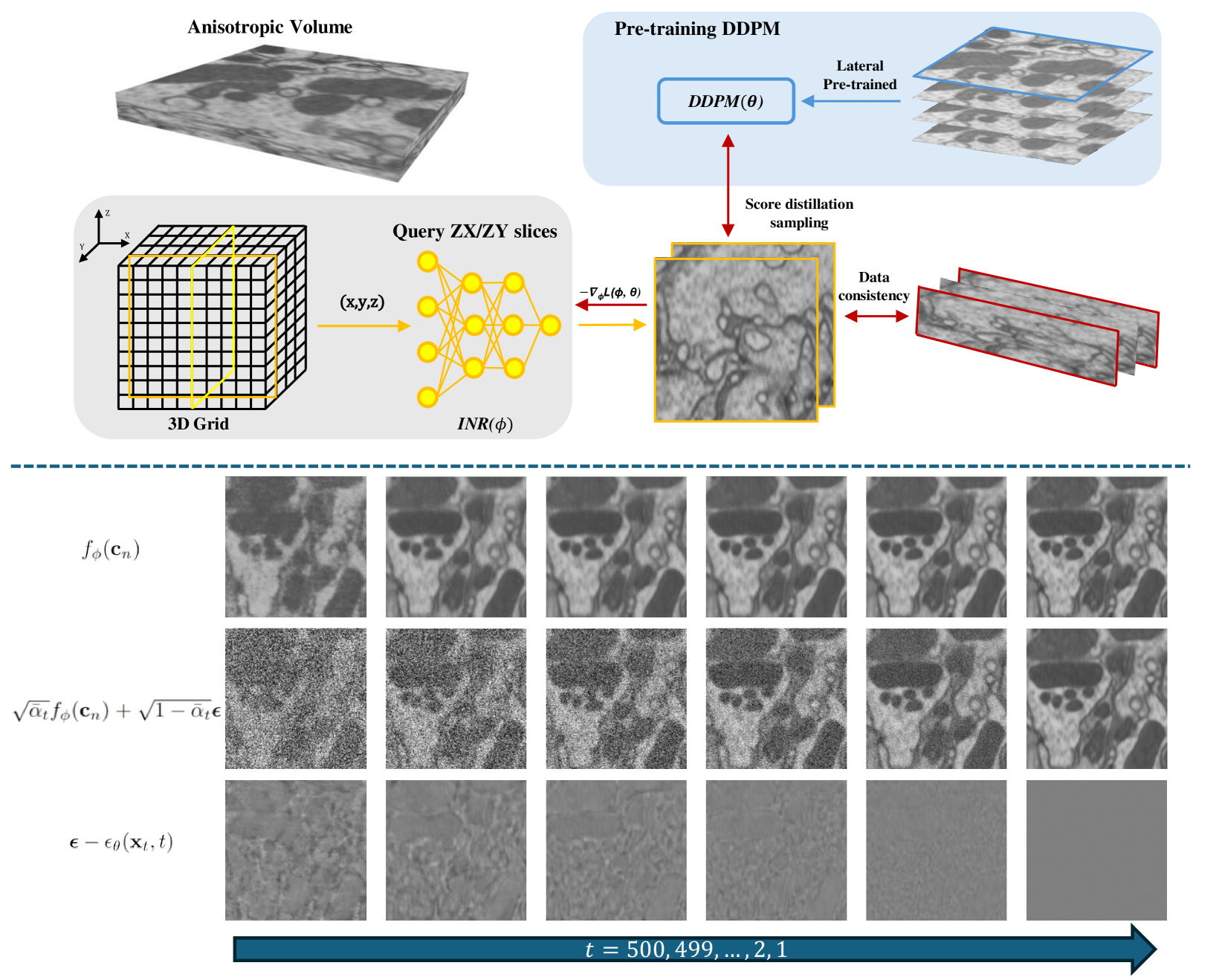
Reference-free Axial Super-resolution of 3D Microscopy Images using Implicit Neural Representation with a 2D Diffusion Prior
Kyungryun Lee, Won-Ki Jeong
Analysis and visualization of 3D microscopy images pose challenges due to anisotropic axial resolution, demanding volumetric super-resolution along the axial direction. While training a learning-based 3D super-resolution model seems to be a straightforward solution, it requires ground truth isotropic volumes and suffers from the curse of dimensionality. Therefore, existing methods utilize 2D neural networks to reconstruct each axial slice, eventually piecing together the entire volume. However, reconstructing each slice in the pixel domain fails to give consistent reconstruction in all directions leading to misalignment artifacts. In this work, we present a reconstruction framework based on implicit neural representation (INR), which allows 3D coherency even when optimized by independent axial slices in a batch-wise manner. Our method optimizes a continuous volumetric representation from low-resolution axial slices, using a 2D diffusion prior trained on high-resolution lateral slices without requiring isotropic volumes. Through experiments on real and synthetic anisotropic microscopy images, we demonstrate that our method surpasses other state-of-the-art reconstruction methods. The source code is available on GitHub: https://github.com/hvcl/INR-diffusion.
Read more8/19/2024