Domain Generalization for 6D Pose Estimation Through NeRF-based Image Synthesis

0

Sign in to get full access
Overview
- This paper introduces a novel approach for 6D pose estimation that leverages neural radiance fields (NeRFs) for image synthesis to improve domain generalization.
- The proposed method, Domain Generalization for 6D Pose Estimation Through NeRF-based Image Synthesis, combines NeRF-based image generation with a 6D pose estimation network to enable robust pose estimation across diverse domains.
- The researchers explore how NeRFs can be leveraged for pose estimation and demonstrate the power of data augmentation techniques for improving domain generalization.
- The method also builds on generative lifting approaches to bridge the gap between 2D images and 3D pose estimation.
Plain English Explanation
This research paper introduces a new way to estimate the 6D pose (position and orientation) of objects in images. Traditional pose estimation methods can struggle when the images come from very different environments or settings. The key idea in this paper is to use a special type of AI model called a neural radiance field (NeRF) to synthesize new images that help the pose estimation network generalize better.
NeRFs are AI models that can generate realistic 3D images from 2D photos. By training a NeRF on images from various domains, the researchers were able to create a diverse set of synthetic images to supplement the original training data. This NeRF-based image synthesis helped the pose estimation network become more robust and able to handle the differences between training and test environments.
The paper demonstrates that this approach outperforms other state-of-the-art methods for 6D pose estimation, particularly when the test data comes from domains that are very different from the training data. By leveraging the power of NeRFs and data augmentation, the researchers were able to develop a more generalizable and effective 6D pose estimation system.
Technical Explanation
The key technical contribution of this paper is the integration of NeRF-based image synthesis into a 6D pose estimation pipeline to improve domain generalization. The researchers first train a NeRF model on images from various domains to learn a rich 3D representation. They then use this NeRF to generate additional synthetic images that are used to augment the training data for the pose estimation network.
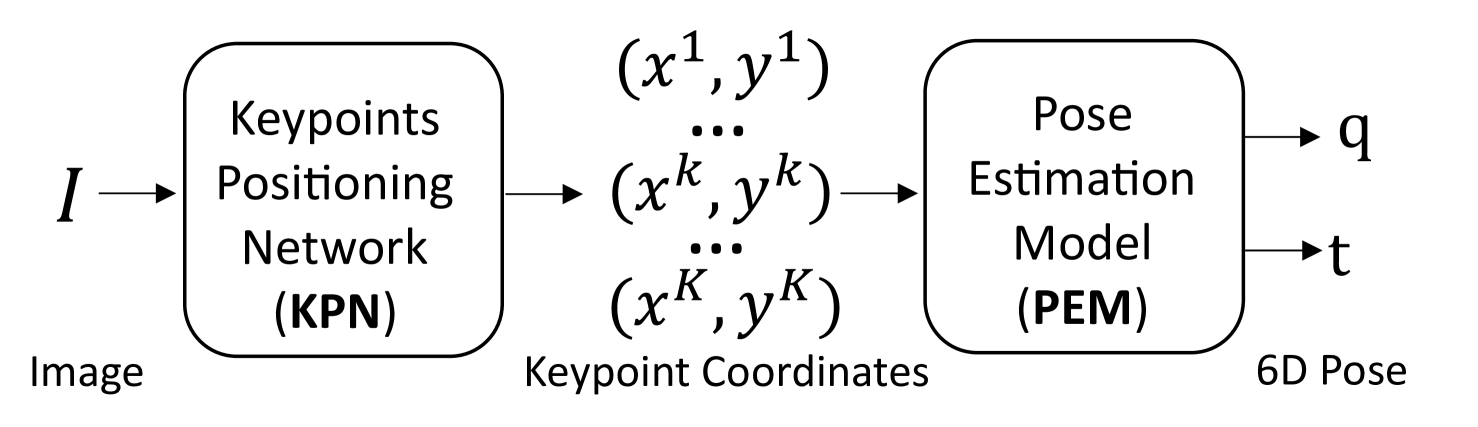
The pose estimation network takes in an image and predicts the 6D pose (3D translation and 3D rotation) of the object of interest. By training this network on the expanded dataset that includes the NeRF-generated images, the model becomes more robust to domain shifts between the training and test environments.
The paper provides a detailed experimental evaluation of this approach on several benchmark datasets for 6D pose estimation. The results demonstrate significant improvements in pose estimation accuracy when compared to other state-of-the-art methods, particularly in challenging cross-domain test scenarios.
Critical Analysis
One potential limitation of this approach is the computational overhead required to train the NeRF model and generate the synthetic images. While the authors show the benefits of this data augmentation strategy, the additional training time and resources needed may be a practical concern for some applications.
Additionally, the paper does not deeply explore the potential biases or artifacts that may be introduced by the NeRF-generated images. It would be valuable to investigate how the fidelity and realism of the synthetic data impacts the final pose estimation performance.
Another area for further research is the integration of generative lifting techniques to better bridge the gap between 2D images and 3D pose estimation. Exploring hybrid approaches that combine NeRF-based synthesis with other 3D reconstruction methods could lead to even more robust and accurate pose estimation systems.
Conclusion
In summary, this paper presents a novel approach for improving 6D pose estimation through the use of NeRF-based image synthesis. By leveraging the power of NeRFs to generate diverse synthetic training data, the researchers were able to develop a pose estimation system that demonstrates strong cross-domain generalization performance.
This work highlights the potential of combining 3D representation learning and data augmentation techniques to address the challenge of domain shift in computer vision tasks. As NeRF and other generative models continue to advance, we can expect to see more innovative applications of these tools for improving the robustness and real-world applicability of pose estimation and other 3D perception systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Domain Generalization for 6D Pose Estimation Through NeRF-based Image Synthesis
Antoine Legrand, Renaud Detry, Christophe De Vleeschouwer
This work introduces a novel augmentation method that increases the diversity of a train set to improve the generalization abilities of a 6D pose estimation network. For this purpose, a Neural Radiance Field is trained from synthetic images and exploited to generate an augmented set. Our method enriches the initial set by enabling the synthesis of images with (i) unseen viewpoints, (ii) rich illumination conditions through appearance extrapolation, and (iii) randomized textures. We validate our augmentation method on the challenging use-case of spacecraft pose estimation and show that it significantly improves the pose estimation generalization capabilities. On the SPEED+ dataset, our method reduces the error on the pose by 50% on both target domains.
Read more7/16/2024
0
Domain Generalization for In-Orbit 6D Pose Estimation
Antoine Legrand, Renaud Detry, Christophe De Vleeschouwer
We address the problem of estimating the relative 6D pose, i.e., position and orientation, of a target spacecraft, from a monocular image, a key capability for future autonomous Rendezvous and Proximity Operations. Due to the difficulty of acquiring large sets of real images, spacecraft pose estimation networks are exclusively trained on synthetic ones. However, because those images do not capture the illumination conditions encountered in orbit, pose estimation networks face a domain gap problem, i.e., they do not generalize to real images. Our work introduces a method that bridges this domain gap. It relies on a novel, end-to-end, neural-based architecture as well as a novel learning strategy. This strategy improves the domain generalization abilities of the network through multi-task learning and aggressive data augmentation policies, thereby enforcing the network to learn domain-invariant features. We demonstrate that our method effectively closes the domain gap, achieving state-of-the-art accuracy on the widespread SPEED+ dataset. Finally, ablation studies assess the impact of key components of our method on its generalization abilities.
Read more6/18/2024
🧠
0
Leveraging Neural Radiance Fields for Pose Estimation of an Unknown Space Object during Proximity Operations
Antoine Legrand, Renaud Detry, Christophe De Vleeschouwer
We address the estimation of the 6D pose of an unknown target spacecraft relative to a monocular camera, a key step towards the autonomous rendezvous and proximity operations required by future Active Debris Removal missions. We present a novel method that enables an off-the-shelf spacecraft pose estimator, which is supposed to known the target CAD model, to be applied on an unknown target. Our method relies on an in-the wild NeRF, i.e., a Neural Radiance Field that employs learnable appearance embeddings to represent varying illumination conditions found in natural scenes. We train the NeRF model using a sparse collection of images that depict the target, and in turn generate a large dataset that is diverse both in terms of viewpoint and illumination. This dataset is then used to train the pose estimation network. We validate our method on the Hardware-In-the-Loop images of SPEED+ that emulate lighting conditions close to those encountered on orbit. We demonstrate that our method successfully enables the training of an off-the-shelf spacecraft pose estimation network from a sparse set of images. Furthermore, we show that a network trained using our method performs similarly to a model trained on synthetic images generated using the CAD model of the target.
Read more6/12/2024
📊
0
On the power of data augmentation for head pose estimation
Michael Welter
Deep learning has been impressively successful in the last decade in predicting human head poses from monocular images. For in-the-wild inputs, the research community has predominantly relied on a single training set of semi-synthetic nature. This paper suggest the combination of different flavors of synthetic data in order to achieve better generalization to natural images. Moreover, additional expansion of the data volume using traditional out-of-plane rotation synthesis is considered. Together with a novel combination of losses and a network architecture with a standard feature-extractor, a competitive model is obtained, both in accuracy and efficiency, which allows full 6 DoF pose estimation in practical real-time applications.
Read more7/12/2024