DRL-Based Federated Self-Supervised Learning for Task Offloading and Resource Allocation in ISAC-Enabled Vehicle Edge Computing

0

Sign in to get full access
Overview
- This paper presents a deep reinforcement learning (DRL)-based federated self-supervised learning approach for task offloading and resource allocation in integrated sensing and communication (ISAC)-enabled vehicle edge computing.
- The proposed system aims to optimize task offloading decisions and resource allocation to improve the performance of vehicle edge computing applications.
- Key aspects include federated learning, self-supervised learning, and DRL-based decision-making.
Plain English Explanation
In this paper, the researchers developed a new method to help vehicles at the edge of a network run their computing tasks more efficiently. The method uses deep reinforcement learning (a type of AI that learns by trial and error) along with federated learning (a way for devices to collaborate on training AI models without sharing their private data) and self-supervised learning (a technique that allows the AI to learn useful features from data without being given the right answers).
The key idea is to have the vehicles work together to figure out the best way to offload (send to other devices) their computing tasks and allocate the available network resources (like bandwidth and processing power) to maximize the overall performance of the vehicle edge computing system. This is important because vehicle edge computing, which brings computing power closer to vehicles, is crucial for things like autonomous driving and real-time data processing.
By using this combined approach of deep reinforcement learning, federated learning, and self-supervised learning, the researchers were able to create a system that can adapt to the changing conditions in the vehicle edge computing network and make smart decisions about task offloading and resource allocation without any single vehicle or server having to know everything about the entire network.
Technical Explanation
The paper introduces a DRL-based federated self-supervised learning framework for task offloading and resource allocation in ISAC-enabled vehicle edge computing. The system consists of three key components:
-
Federated Learning: Vehicles collaboratively train a shared deep learning model without sharing their private data, leveraging the computing and storage resources at the network edge.
-
Self-Supervised Learning: The federated learning model is trained using self-supervised learning techniques, allowing it to learn useful representations from the vehicle data without relying on labeled data.
-
DRL-based Decision-Making: A DRL agent is used to make optimal decisions for task offloading and resource allocation, based on the learned representations from the federated self-supervised learning model.
The authors formulate the task offloading and resource allocation problem as a Markov decision process and solve it using a DRL algorithm. The DRL agent learns to make decisions that balance factors like computing latency, energy consumption, and network resource utilization.
Through extensive simulations, the authors demonstrate that their proposed approach outperforms baseline methods in terms of task completion rate, latency, and energy efficiency, showcasing the benefits of the integrated federated self-supervised learning and DRL-based decision-making framework.
Critical Analysis
The paper presents a compelling approach to address the challenges of task offloading and resource allocation in ISAC-enabled vehicle edge computing. The key strengths of the proposed system are:
-
Adaptability: The DRL-based decision-making allows the system to adapt to dynamic changes in the vehicle edge computing environment, which is crucial given the highly variable and unpredictable nature of this domain.
-
Privacy-Preserving: The federated learning component enables vehicles to collaborate on training the deep learning model without sharing their private data, addressing important privacy concerns.
-
Data Efficiency: The self-supervised learning approach allows the system to learn useful representations from the vehicle data without the need for costly manual labeling.
However, the paper also acknowledges several limitations and areas for further research, including:
- Simulation-based Evaluation: The performance of the proposed approach is only evaluated through simulations, and its real-world deployment and performance would need to be further investigated.
- Heterogeneous Devices: The current framework assumes homogeneous vehicle devices, and extending it to handle heterogeneous computational capabilities and communication resources would be an important next step.
- Scalability: The scalability of the federated learning and DRL-based decision-making components as the number of vehicles increases would need to be carefully analyzed.
Addressing these limitations and continuing to refine the proposed approach could lead to significant advancements in the field of ISAC-assisted vehicle edge computing.
Conclusion
This paper presents a novel DRL-based federated self-supervised learning framework for task offloading and resource allocation in ISAC-enabled vehicle edge computing. By leveraging the strengths of federated learning, self-supervised learning, and DRL-based decision-making, the proposed approach demonstrates the potential to improve the performance and efficiency of vehicle edge computing applications, while also addressing important privacy concerns. As vehicle edge computing continues to play a crucial role in enabling advanced automotive technologies, this research represents an important step forward in optimizing the underlying computing and networking infrastructure.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
DRL-Based Federated Self-Supervised Learning for Task Offloading and Resource Allocation in ISAC-Enabled Vehicle Edge Computing
Xueying Gu, Qiong Wu, Pingyi Fan, Nan Cheng, Wen Chen, Khaled B. Letaief
Intelligent Transportation Systems (ITS) leverage Integrated Sensing and Communications (ISAC) to enhance data exchange between vehicles and infrastructure in the Internet of Vehicles (IoV). This integration inevitably increases computing demands, risking real-time system stability. Vehicle Edge Computing (VEC) addresses this by offloading tasks to Road Side Unit (RSU), ensuring timely services. Our previous work FLSimCo algorithm, which uses local resources for Federated Self-Supervised Learning (SSL), though vehicles often can't complete all iterations task. Our improved algorithm offloads partial task to RSU and optimizes energy consumption by adjusting transmission power, CPU frequency, and task assignment ratios, balancing local and RSU-based training. Meanwhile, setting an offloading threshold further prevents inefficiencies. Simulation results show that the enhanced algorithm reduces energy consumption, improves offloading efficiency and the accuracy of Federated SSL.
Read more8/28/2024

0
Reconfigurable Intelligent Surface Aided Vehicular Edge Computing: Joint Phase-shift Optimization and Multi-User Power Allocation
Kangwei Qi, Qiong Wu, Pingyi Fan, Nan Cheng, Wen Chen, Khaled B. Letaief
Vehicular edge computing (VEC) is an emerging technology with significant potential in the field of internet of vehicles (IoV), enabling vehicles to perform intensive computational tasks locally or offload them to nearby edge devices. However, the quality of communication links may be severely deteriorated due to obstacles such as buildings, impeding the offloading process. To address this challenge, we introduce the use of Reconfigurable Intelligent Surfaces (RIS), which provide alternative communication pathways to assist vehicular communication. By dynamically adjusting the phase-shift of the RIS, the performance of VEC systems can be substantially improved. In this work, we consider a RIS-assisted VEC system, and design an optimal scheme for local execution power, offloading power, and RIS phase-shift, where random task arrivals and channel variations are taken into account. To address the scheme, we propose an innovative deep reinforcement learning (DRL) framework that combines the Deep Deterministic Policy Gradient (DDPG) algorithm for optimizing RIS phase-shift coefficients and the Multi-Agent Deep Deterministic Policy Gradient (MADDPG) algorithm for optimizing the power allocation of vehicle user (VU). Simulation results show that our proposed scheme outperforms the traditional centralized DDPG, Twin Delayed Deep Deterministic Policy Gradient (TD3) and some typical stochastic schemes.
Read more7/19/2024
0
Adaptive and Parallel Split Federated Learning in Vehicular Edge Computing
Xianke Qiang, Zheng Chang, Yun Hu, Lei Liu, Timo Hamalainen
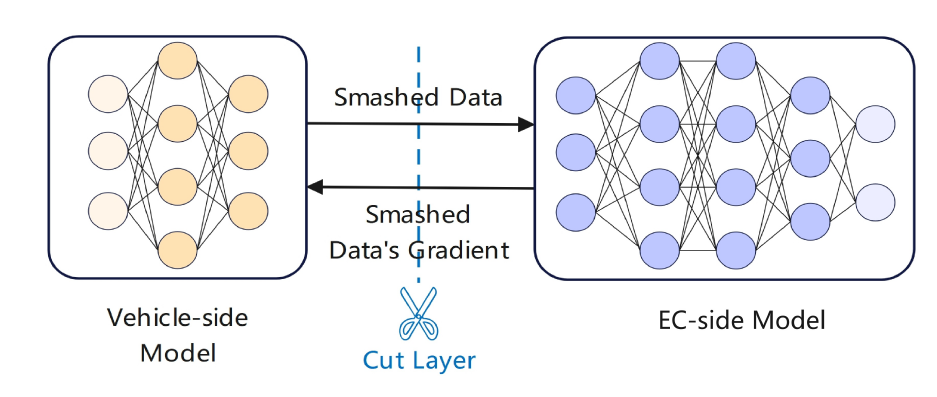
Vehicular edge intelligence (VEI) is a promising paradigm for enabling future intelligent transportation systems by accommodating artificial intelligence (AI) at the vehicular edge computing (VEC) system. Federated learning (FL) stands as one of the fundamental technologies facilitating collaborative model training locally and aggregation, while safeguarding the privacy of vehicle data in VEI. However, traditional FL faces challenges in adapting to vehicle heterogeneity, training large models on resource-constrained vehicles, and remaining susceptible to model weight privacy leakage. Meanwhile, split learning (SL) is proposed as a promising collaborative learning framework which can mitigate the risk of model wights leakage, and release the training workload on vehicles. SL sequentially trains a model between a vehicle and an edge cloud (EC) by dividing the entire model into a vehicle-side model and an EC-side model at a given cut layer. In this work, we combine the advantages of SL and FL to develop an Adaptive Split Federated Learning scheme for Vehicular Edge Computing (ASFV). The ASFV scheme adaptively splits the model and parallelizes the training process, taking into account mobile vehicle selection and resource allocation. Our extensive simulations, conducted on non-independent and identically distributed data, demonstrate that the proposed ASFV solution significantly reduces training latency compared to existing benchmarks, while adapting to network dynamics and vehicles' mobility.
Read more5/30/2024

0
Digital Twin Vehicular Edge Computing Network: Task Offloading and Resource Allocation
Yu Xie, Qiong Wu, Pingyi Fan
With the increasing demand for multiple applications on internet of vehicles. It requires vehicles to carry out multiple computing tasks in real time. However, due to the insufficient computing capability of vehicles themselves, offloading tasks to vehicular edge computing (VEC) servers and allocating computing resources to tasks becomes a challenge. In this paper, a multi task digital twin (DT) VEC network is established. By using DT to develop offloading strategies and resource allocation strategies for multiple tasks of each vehicle in a single slot, an optimization problem is constructed. To solve it, we propose a multi-agent reinforcement learning method on the task offloading and resource allocation. Numerous experiments demonstrate that our method is effective compared to other benchmark algorithms.
Read more7/17/2024