Dynamic Posture Manipulation During Tumbling for Closed-Loop Heading Angle Control
2405.05447
0
0

Abstract
Passive tumbling uses natural forces like gravity for efficient travel. But without an active means of control, passive tumblers must rely entirely on external forces. Northeastern University's COBRA is a snake robot that can morph into a ring, which employs passive tumbling to traverse down slopes. However, due to its articulated joints, it is also capable of dynamically altering its posture to manipulate the dynamics of the tumbling locomotion for active steering. This paper presents a modelling and control strategy based on collocation optimization for real-time steering of COBRA's tumbling locomotion. We validate our approach using Matlab simulations.
Create account to get full access
Overview
- This paper presents a method for dynamic posture manipulation during tumbling to achieve closed-loop heading angle control for robots.
- The researchers develop a control framework that allows robots to adjust their posture in mid-air to steer their orientation during tumbling motions.
- This capability could enable more precise and agile aerial maneuvers for applications like drone navigation or juggling/tossing tasks.
Plain English Explanation
The paper describes a way for robots to control their orientation during complex aerial movements like tumbling. Normally, a robot's heading (the direction it's facing) during a tumbling motion would be hard to predict and control. But the researchers developed a control system that allows the robot to intentionally adjust its body position in the air to steer its orientation.
This could be really useful for robots that need to perform precise aerial maneuvers, like drones navigating through tight spaces or robots juggling or tossing objects. Instead of just tumbling unpredictably, the robot can use its body movements to control which way it's facing as it moves through the air. This added control and agility could enable new aerial behaviors for robots inspired by how bacteria propel themselves or snake-like slithering motions.
Technical Explanation
The paper presents a control framework for dynamic posture manipulation during tumbling maneuvers to enable closed-loop heading angle control for robots. The key idea is to leverage the robot's ability to actively adjust its body configuration in the air to steer its orientation, rather than just relying on the uncontrolled dynamics of the tumbling motion.
The researchers develop a model-based control approach that plans the robot's body movements to achieve a desired final heading angle at the end of the tumbling sequence. This involves optimizing a set of control parameters that define the robot's posture adjustments over the course of the maneuver.
They validate their approach through simulations and hardware experiments using a custom tumbling robot platform. The results demonstrate the ability to precisely control the robot's heading angle during the tumbling motion, which could enable new aerial robot behaviors not possible with traditional control approaches.
Critical Analysis
The paper presents a novel and promising approach for enhancing the aerial agility and control of robots through dynamic posture manipulation during tumbling motions. However, the research is still at a relatively early stage, with validation limited to simulations and a single hardware testbed.
Some key areas for further investigation include:
- Extending the control framework to handle more complex, multi-link robot morphologies
- Demonstrating the approach on a wider range of tumbling maneuvers and aerial tasks
- Analyzing the robustness of the control system to disturbances and uncertainties
- Investigating the energy efficiency and physical limitations of the posture adjustment capabilities
Additionally, while the paper focuses on the technical aspects of the control system, there may be interesting questions around the ethical implications of enhancing robot agility and autonomy for real-world applications.
Conclusion
This paper introduces an innovative control framework that enables robots to actively manipulate their body posture during aerial tumbling maneuvers to precisely steer their heading angle. This added control and agility could unlock new possibilities for aerial robot behaviors, from drone navigation to dexterous object manipulation. While the research is still in early stages, the potential of this approach to enhance robot mobility and adaptability is an exciting area for further development and exploration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Non-impulsive Contact-Implicit Motion Planning for Morpho-functional Loco-manipulation
Adarsh Salagame, Kruthika Gangaraju, Harin Kumar Nallaguntla, Eric Sihite, Gunar Schirner, Alireza Ramezani
0
0
Object manipulation has been extensively studied in the context of fixed base and mobile manipulators. However, the overactuated locomotion modality employed by snake robots allows for a unique blend of object manipulation through locomotion, referred to as loco-manipulation. The following work presents an optimization approach to solving the loco-manipulation problem based on non-impulsive implicit contact path planning for our snake robot COBRA. We present the mathematical framework and show high fidelity simulation results for fixed-shape lateral rolling trajectories that demonstrate the object manipulation.
4/16/2024
✅
Controlling the Cascade: Kinematic Planning for N-ball Toss Juggling
Kai Ploeger, Jan Peters
0
0
Dynamic movements are ubiquitous in human motor behavior as they tend to be more efficient and can solve a broader range of skill domains than their quasi-static counterparts. For decades, robotic juggling tasks have been among the most frequently studied dynamic manipulation problems since the required dynamic dexterity can be scaled to arbitrarily high difficulty. However, successful approaches have been limited to basic juggling skills, indicating a lack of understanding of the required constraints for dexterous toss juggling. We present a detailed analysis of the toss juggling task, identifying the key challenges and formalizing it as a trajectory optimization problem. Building on our state-of-the-art, real-world toss juggling platform, we reach the theoretical limits of toss juggling in simulation, evaluate a resulting real-time controller in environments of varying difficulty and achieve robust toss juggling of up to 17 balls on two anthropomorphic manipulators.
4/8/2024
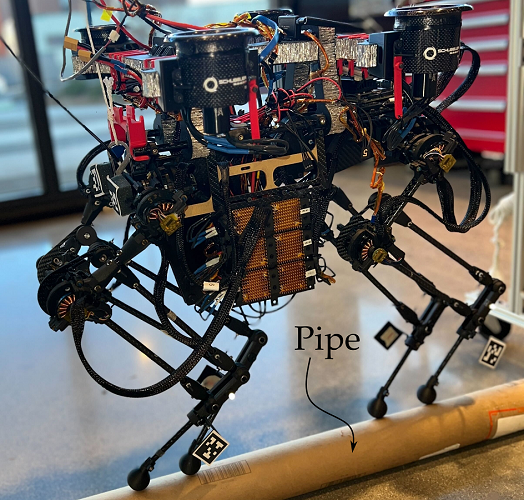
Narrow-Path, Dynamic Walking Using Integrated Posture Manipulation and Thrust Vectoring
Kaushik Venkatesh Krishnamurthy, Chenghao Wang, Shreyansh Pitroda, Adarsh Salagame, Eric Sihite, Reza Nemovi, Alireza Ramezani, Morteza Gharib
0
0
This research concentrates on enhancing the navigational capabilities of Northeastern Universitys Husky, a multi-modal quadrupedal robot, that can integrate posture manipulation and thrust vectoring, to traverse through narrow pathways such as walking over pipes and slacklining. The Husky is outfitted with thrusters designed to stabilize its body during dynamic walking over these narrow paths. The project involves modeling the robot using the HROM (Husky Reduced Order Model) and developing an optimal control framework. This framework is based on polynomial approximation of the HROM and a collocation approach to derive optimal thruster commands necessary for achieving dynamic walking on narrow paths. The effectiveness of the modeling and control design approach is validated through simulations conducted using Matlab.
5/13/2024

Multi-Wheeled Passive Sliding with Fully-Actuated Aerial Robots: Tip-Over Recovery and Avoidance
Tong Hui, Eugenio Cuniato, Michael Pantic, Jefferson Ghielmini, Christian Lanegger, Dimitrios Papageorgiou, Marco Tognon, Roland Siegwart, Matteo Fumagalli
0
0
Push-and-slide tasks carried out by fully-actuated aerial robots can be used for inspection and simple maintenance tasks at height, such as non-destructive testing and painting. Often, an end-effector based on multiple non-actuated contact wheels is used to contact the surface. This approach entails challenges in ensuring consistent wheel contact with a surface whose exact orientation and location might be uncertain due to sensor aliasing and drift. Using a standard full-pose controller dependent on the inaccurate surface position and orientation may cause wheels to lose contact during sliding, and subsequently lead to robot tip-over. To address the tip-over issue, we present two approaches: (1) tip-over avoidance guidelines for hardware design, and (2) control for tip-over recovery and avoidance. Physical experiments with a fully-actuated aerial vehicle were executed for a push-and-slide task on a flat surface. The resulting data is used in deriving tip-over avoidance guidelines and designing a simulator that closely captures real-world conditions. We then use the simulator to test the effectiveness and robustness of the proposed approaches in risky scenarios against uncertainties.
5/30/2024