EdgeLoc: A Communication-Adaptive Parallel System for Real-Time Localization in Infrastructure-Assisted Autonomous Driving

0
Sign in to get full access
Overview
- Proposes a communication-adaptive parallel system called EdgeLoc for real-time localization in infrastructure-assisted autonomous driving
- Leverages edge computing and parallel processing to enable efficient localization with reduced communication overhead
- Designed to adapt to varying network conditions and provide reliable localization in challenging environments
Plain English Explanation
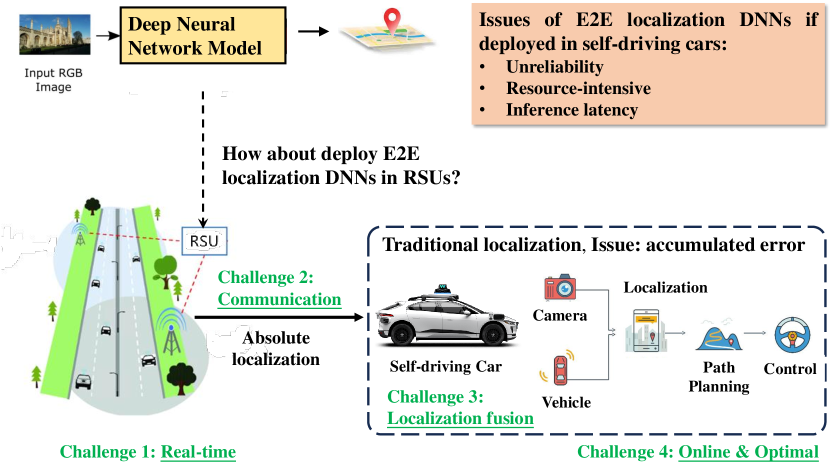
The paper introduces a system called EdgeLoc that aims to enable efficient and reliable real-time localization for autonomous vehicles in infrastructure-assisted driving scenarios. Autonomous vehicles rely on accurate localization to navigate safely, but this can be challenging in environments with limited GPS coverage or other obstacles.
EdgeLoc addresses this by using a combination of edge computing and parallel processing. The system offloads computationally intensive localization tasks to edge servers, which can provide faster processing and reduced communication overhead compared to a cloud-based approach. EdgeLoc is also designed to adapt to changing network conditions, ensuring reliable localization even in areas with poor connectivity.
By leveraging the benefits of edge computing and parallel processing, EdgeLoc seeks to enable robust real-time localization for autonomous vehicles, even in challenging infrastructure-assisted driving environments. This could have important implications for the development of more capable and reliable self-driving technologies.
Technical Explanation
The EdgeLoc system proposed in the paper uses a communication-adaptive parallel architecture to enable efficient real-time localization for autonomous vehicles in infrastructure-assisted driving scenarios. The key elements of the system include:
-
Edge Computing: EdgeLoc offloads computationally intensive localization tasks to edge servers, which are placed strategically along the road infrastructure. This reduces the communication overhead between the vehicle and the cloud, improving responsiveness and reliability.
-
Parallel Processing: The localization pipeline is designed to leverage parallel processing, with different components running concurrently on the edge servers. This allows for faster overall processing and more efficient use of available compute resources.
-
Adaptive Communication: EdgeLoc monitors network conditions and dynamically adjusts the communication strategy to maintain reliable localization even in areas with poor connectivity. This includes selectively offloading tasks to edge servers or the cloud based on available bandwidth.
The paper describes the system architecture and presents experimental results demonstrating the performance and adaptability of EdgeLoc in various infrastructure-assisted driving scenarios. The authors compare EdgeLoc to a cloud-based localization approach and show significant improvements in latency, communication overhead, and localization accuracy.
Critical Analysis
The EdgeLoc system proposed in the paper addresses an important challenge in autonomous driving by enabling reliable real-time localization in infrastructure-assisted environments. The use of edge computing and parallel processing is a promising approach, as it can reduce communication overhead and improve responsiveness compared to a traditional cloud-based solution.
However, the paper does not fully address the potential challenges and limitations of the EdgeLoc system. For example, the authors do not discuss the scalability of the system as the number of vehicles and edge servers increases, or the potential impact of edge server failures on overall system reliability. Additionally, the paper does not explore the cost and deployment considerations associated with the required edge infrastructure.
Further research could also investigate the integration of EdgeLoc with other autonomous driving technologies, such as G-Loc: Tightly-Coupled Graph Localization Prior, Leveraging Edge Detection Neural Networks for Better UAV Localization, or ECAR: Edge-Assisted Collaborative Augmented Reality Framework, to further enhance the overall capabilities and robustness of the self-driving system.
Conclusion
The EdgeLoc system proposed in the paper represents a significant step towards enabling reliable real-time localization for autonomous vehicles in infrastructure-assisted driving scenarios. By leveraging edge computing and parallel processing, the system can reduce communication overhead, improve responsiveness, and maintain accurate localization even in challenging environments with poor connectivity.
While the paper presents promising results, further research is needed to address potential scalability and deployment challenges. Integrating EdgeLoc with other emerging autonomous driving technologies could also lead to more comprehensive and robust solutions for the development of safer and more capable self-driving systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!