Leveraging edge detection and neural networks for better UAV localization
2404.06207
0
0
Abstract
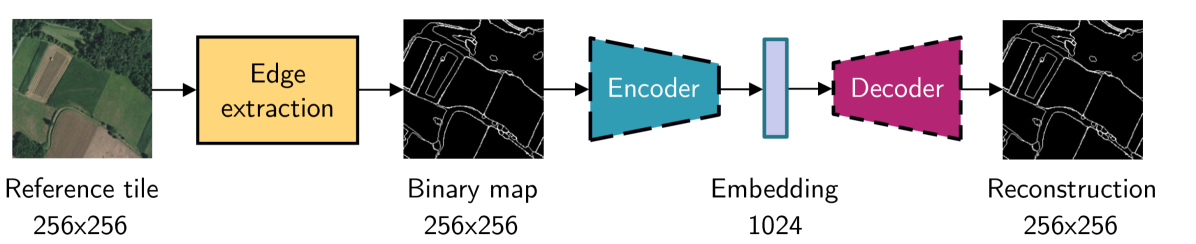
We propose a novel method for geolocalizing Unmanned Aerial Vehicles (UAVs) in environments lacking Global Navigation Satellite Systems (GNSS). Current state-of-the-art techniques employ an offline-trained encoder to generate a vector representation (embedding) of the UAV's current view, which is then compared with pre-computed embeddings of geo-referenced images to determine the UAV's position. Here, we demonstrate that the performance of these methods can be significantly enhanced by preprocessing the images to extract their edges, which exhibit robustness to seasonal and illumination variations. Furthermore, we establish that utilizing edges enhances resilience to orientation and altitude inaccuracies. Additionally, we introduce a confidence criterion for localization. Our findings are substantiated through synthetic experiments.
Create account to get full access
Overview
- This research paper explores leveraging edge detection and neural networks to improve the localization of unmanned aerial vehicles (UAVs).
- The researchers investigate using edge detection techniques and neural networks to enhance the accuracy and reliability of UAV positioning and navigation.
- The paper presents a dataset and evaluation of their proposed approach, which aims to advance the state of the art in UAV localization.
Plain English Explanation
Unmanned aerial vehicles (UAVs), also known as drones, are becoming increasingly common for a variety of applications, from aerial photography to package delivery. Accurate localization, or determining the precise position and orientation of a UAV, is critical for these applications to work effectively and safely.
This research paper explores a new approach to improving UAV localization by combining two powerful techniques: edge detection and neural networks. Edge detection is a way of identifying the boundaries and outlines of objects in an image, while neural networks are a type of machine learning algorithm that can learn complex patterns from data.
The researchers hypothesized that by using edge detection to identify key landmarks and features in the environment, and then feeding this information into a neural network, they could create a more accurate and reliable system for determining a UAV's location. This could be especially helpful in challenging environments, like urban areas with many buildings and obstacles, where traditional GPS-based localization methods may struggle.
To test their approach, the researchers created a new dataset of UAV images and measurements, and developed a neural network-based model to process the edge-detected features. Their results showed that this combined approach outperformed other state-of-the-art localization methods, suggesting that it could be a valuable tool for improving the safety and performance of UAVs in a variety of real-world applications.
Technical Explanation
The researchers proposed a novel approach that leverages both edge detection and neural networks to enhance UAV localization. They hypothesized that by using edge detection to identify key landmarks and features in the environment, and then feeding this information into a neural network, they could create a more accurate and reliable system for determining a UAV's location.
To test their approach, the researchers developed a custom dataset of UAV images and measurements, which they used to train and evaluate their neural network-based model. The model took the edge-detected features from the UAV images as input and produced estimates of the UAV's position and orientation.
The researchers' results showed that their combined edge detection and neural network approach outperformed other state-of-the-art localization methods, such as those based solely on GPS or visual odometry. This suggests that their technique could be a valuable tool for improving the safety and performance of UAVs in a variety of real-world applications, particularly in challenging environments where traditional localization methods may struggle.
Critical Analysis
The researchers acknowledge several limitations of their study, including the relatively small size of their dataset and the fact that it was collected in a controlled indoor environment. They note the need for further research to evaluate the performance of their approach in more diverse, real-world settings.
Additionally, while the researchers' results are promising, it is important to consider potential privacy and security concerns associated with the use of UAV localization technologies. There are ongoing discussions about the ethical and regulatory implications of these technologies, and further research may be needed to address these issues.
Overall, the researchers have presented a compelling approach to improving UAV localization, but additional work will be necessary to fully realize the potential of this technology and ensure its responsible deployment.
Conclusion
This research paper introduces a novel approach to UAV localization that combines edge detection and neural networks to achieve improved accuracy and reliability. The researchers' results suggest that this combined technique outperforms other state-of-the-art methods, potentially paving the way for more advanced and versatile UAV applications in the future.
While the study has some limitations, it represents an important step forward in the field of UAV localization and highlights the potential of integrating computer vision and machine learning techniques to address the challenges of operating unmanned aerial vehicles in complex, real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
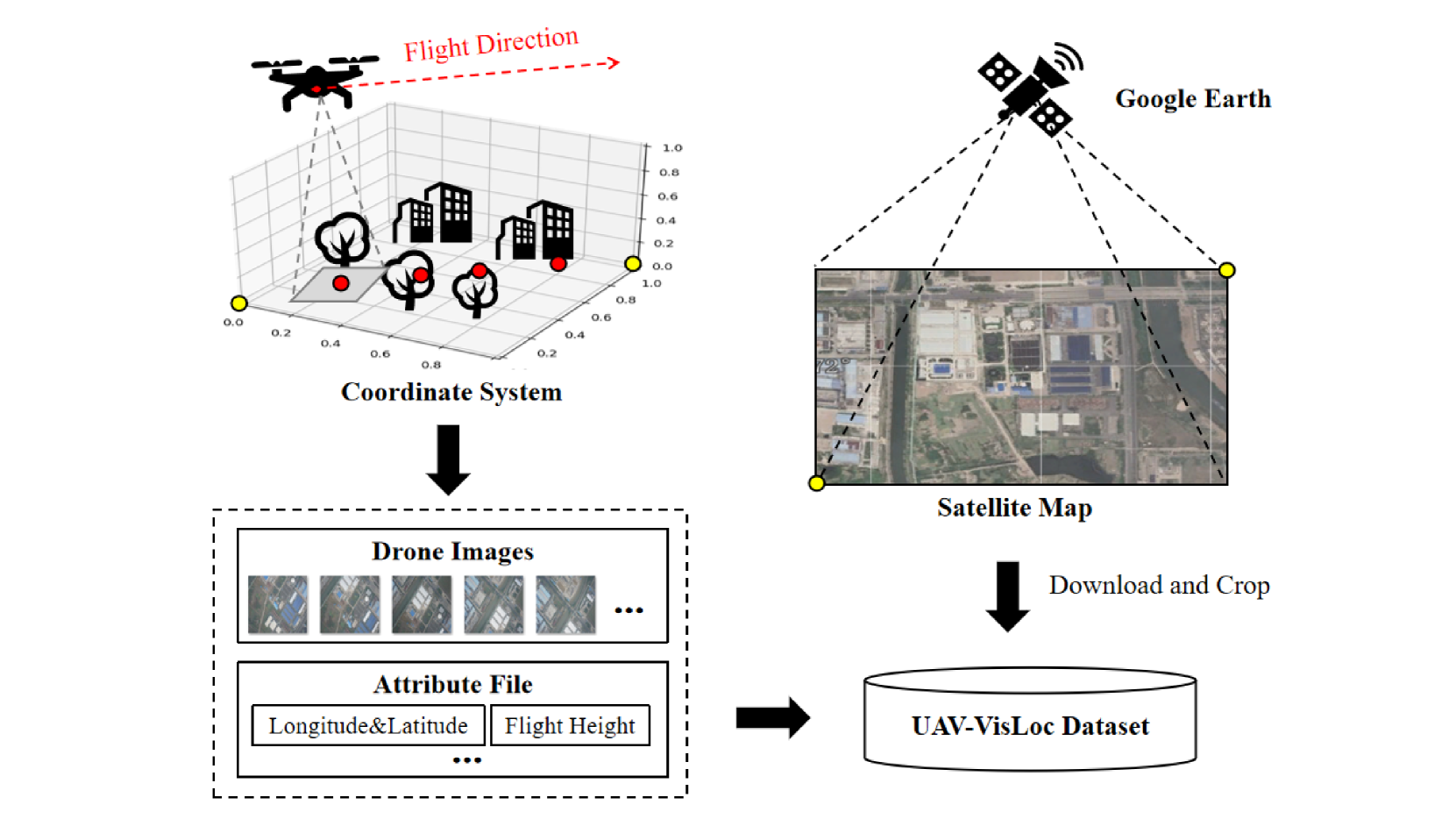
UAV-VisLoc: A Large-scale Dataset for UAV Visual Localization
Wenjia Xu, Yaxuan Yao, Jiaqi Cao, Zhiwei Wei, Chunbo Liu, Jiuniu Wang, Mugen Peng
0
0
The application of unmanned aerial vehicles (UAV) has been widely extended recently. It is crucial to ensure accurate latitude and longitude coordinates for UAVs, especially when the global navigation satellite systems (GNSS) are disrupted and unreliable. Existing visual localization methods achieve autonomous visual localization without error accumulation by matching the ground-down view image of UAV with the ortho satellite maps. However, collecting UAV ground-down view images across diverse locations is costly, leading to a scarcity of large-scale datasets for real-world scenarios. Existing datasets for UAV visual localization are often limited to small geographic areas or are focused only on urban regions with distinct textures. To address this, we define the UAV visual localization task by determining the UAV's real position coordinates on a large-scale satellite map based on the captured ground-down view. In this paper, we present a large-scale dataset, UAV-VisLoc, to facilitate the UAV visual localization task. This dataset comprises images from diverse drones across 11 locations in China, capturing a range of topographical features. The dataset features images from fixed-wing drones and multi-terrain drones, captured at different altitudes and orientations. Our dataset includes 6,742 drone images and 11 satellite maps, with metadata such as latitude, longitude, altitude, and capture date. Our dataset is tailored to support both the training and testing of models by providing a diverse and extensive data.
5/21/2024

Clustering-based Learning for UAV Tracking and Pose Estimation
Jiaping Xiao, Phumrapee Pisutsin, Cheng Wen Tsao, Mir Feroskhan
0
0
UAV tracking and pose estimation plays an imperative role in various UAV-related missions, such as formation control and anti-UAV measures. Accurately detecting and tracking UAVs in a 3D space remains a particularly challenging problem, as it requires extracting sparse features of micro UAVs from different flight environments and continuously matching correspondences, especially during agile flight. Generally, cameras and LiDARs are the two main types of sensors used to capture UAV trajectories in flight. However, both sensors have limitations in UAV classification and pose estimation. This technical report briefly introduces the method proposed by our team NTU-ICG for the CVPR 2024 UG2+ Challenge Track 5. This work develops a clustering-based learning detection approach, CL-Det, for UAV tracking and pose estimation using two types of LiDARs, namely Livox Avia and LiDAR 360. We combine the information from the two data sources to locate drones in 3D. We first align the timestamps of Livox Avia data and LiDAR 360 data and then separate the point cloud of objects of interest (OOIs) from the environment. The point cloud of OOIs is clustered using the DBSCAN method, with the midpoint of the largest cluster assumed to be the UAV position. Furthermore, we utilize historical estimations to fill in missing data. The proposed method shows competitive pose estimation performance and ranks 5th on the final leaderboard of the CVPR 2024 UG2+ Challenge.
5/28/2024
🧪
A Multimodal Learning-based Approach for Autonomous Landing of UAV
Francisco Neves, Lu'is Branco, Maria Pereira, Rafael Claro, Andry Pinto
0
0
In the field of autonomous Unmanned Aerial Vehicles (UAVs) landing, conventional approaches fall short in delivering not only the required precision but also the resilience against environmental disturbances. Yet, learning-based algorithms can offer promising solutions by leveraging their ability to learn the intelligent behaviour from data. On one hand, this paper introduces a novel multimodal transformer-based Deep Learning detector, that can provide reliable positioning for precise autonomous landing. It surpasses standard approaches by addressing individual sensor limitations, achieving high reliability even in diverse weather and sensor failure conditions. It was rigorously validated across varying environments, achieving optimal true positive rates and average precisions of up to 90%. On the other hand, it is proposed a Reinforcement Learning (RL) decision-making model, based on a Deep Q-Network (DQN) rationale. Initially trained in sumlation, its adaptive behaviour is successfully transferred and validated in a real outdoor scenario. Furthermore, this approach demonstrates rapid inference times of approximately 5ms, validating its applicability on edge devices.
5/22/2024
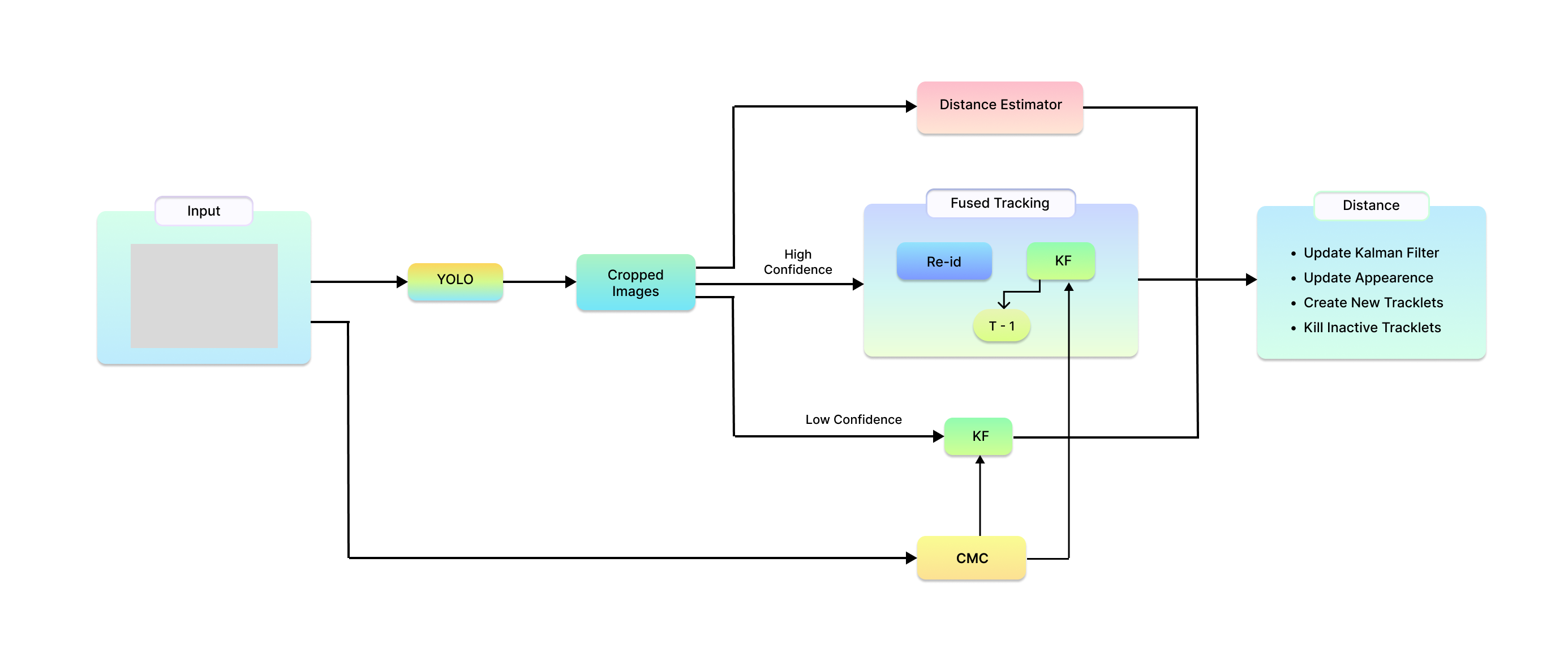
Ensuring UAV Safety: A Vision-only and Real-time Framework for Collision Avoidance Through Object Detection, Tracking, and Distance Estimation
Vasileios Karampinis, Anastasios Arsenos, Orfeas Filippopoulos, Evangelos Petrongonas, Christos Skliros, Dimitrios Kollias, Stefanos Kollias, Athanasios Voulodimos
0
0
In the last twenty years, unmanned aerial vehicles (UAVs) have garnered growing interest due to their expanding applications in both military and civilian domains. Detecting non-cooperative aerial vehicles with efficiency and estimating collisions accurately are pivotal for achieving fully autonomous aircraft and facilitating Advanced Air Mobility (AAM). This paper presents a deep-learning framework that utilizes optical sensors for the detection, tracking, and distance estimation of non-cooperative aerial vehicles. In implementing this comprehensive sensing framework, the availability of depth information is essential for enabling autonomous aerial vehicles to perceive and navigate around obstacles. In this work, we propose a method for estimating the distance information of a detected aerial object in real time using only the input of a monocular camera. In order to train our deep learning components for the object detection, tracking and depth estimation tasks we utilize the Amazon Airborne Object Tracking (AOT) Dataset. In contrast to previous approaches that integrate the depth estimation module into the object detector, our method formulates the problem as image-to-image translation. We employ a separate lightweight encoder-decoder network for efficient and robust depth estimation. In a nutshell, the object detection module identifies and localizes obstacles, conveying this information to both the tracking module for monitoring obstacle movement and the depth estimation module for calculating distances. Our approach is evaluated on the Airborne Object Tracking (AOT) dataset which is the largest (to the best of our knowledge) air-to-air airborne object dataset.
5/17/2024