Ego-Motion Aware Target Prediction Module for Robust Multi-Object Tracking
2404.03110
0
0

Abstract
Multi-object tracking (MOT) is a prominent task in computer vision with application in autonomous driving, responsible for the simultaneous tracking of multiple object trajectories. Detection-based multi-object tracking (DBT) algorithms detect objects using an independent object detector and predict the imminent location of each target. Conventional prediction methods in DBT utilize Kalman Filter(KF) to extrapolate the target location in the upcoming frames by supposing a constant velocity motion model. These methods are especially hindered in autonomous driving applications due to dramatic camera motion or unavailable detections. Such limitations lead to tracking failures manifested by numerous identity switches and disrupted trajectories. In this paper, we introduce a novel KF-based prediction module called the Ego-motion Aware Target Prediction (EMAP) module by focusing on the integration of camera motion and depth information with object motion models. Our proposed method decouples the impact of camera rotational and translational velocity from the object trajectories by reformulating the Kalman Filter. This reformulation enables us to reject the disturbances caused by camera motion and maximizes the reliability of the object motion model. We integrate our module with four state-of-the-art base MOT algorithms, namely OC-SORT, Deep OC-SORT, ByteTrack, and BoT-SORT. In particular, our evaluation on the KITTI MOT dataset demonstrates that EMAP remarkably drops the number of identity switches (IDSW) of OC-SORT and Deep OC-SORT by 73% and 21%, respectively. At the same time, it elevates other performance metrics such as HOTA by more than 5%. Our source code is available at https://github.com/noyzzz/EMAP.
Create account to get full access
Overview
- This paper proposes an "Ego-Motion Aware Target Prediction Module" to improve the performance of multi-object tracking systems.
- The key idea is to incorporate information about the camera's own movement (ego-motion) to better predict the future locations of tracked objects.
- The authors show this approach can lead to more robust and accurate multi-object tracking, particularly in dynamic environments.
Plain English Explanation
Imagine you're trying to keep track of multiple moving objects, like cars on a busy street, while you're also moving, such as in a self-driving car. It can be really challenging to predict where those other cars will be in the future, since their movements are affected by both their own actions and the overall motion of the scene.
The researchers in this paper came up with a way to account for this camera motion, or "ego-motion", when predicting where the tracked objects will go next. By incorporating information about how the camera itself is moving, the tracking system can make smarter guesses about the future locations of the other cars, motorcycles, pedestrians, etc.
This ego-motion awareness allows the tracking to be more robust and reliable, even in complex, dynamic environments where both the camera and the tracked objects are in motion. Instead of just blindly extrapolating the past movements of the objects, the system can factor in the camera's own movements to make more accurate predictions.
The key insight is that understanding the camera's ego-motion provides important context that helps disambiguate the observed motions of the tracked targets. This contextual information makes the predictions stronger and leads to better overall multi-object tracking performance.
Technical Explanation
The paper proposes an "Ego-Motion Aware Target Prediction Module" that can be integrated into existing multi-object tracking pipelines. This module takes in information about the camera's ego-motion, extracted from visual cues and odometry sensors, and uses it to improve the accuracy of target location predictions.
The core technical approach involves:
- Estimating the camera's ego-motion from visual and sensor data
- Incorporating this ego-motion information into the target state estimation process
- Using the ego-motion-aware target states to make more robust future location predictions
The authors evaluate this approach on standard multi-object tracking benchmarks, showing significant improvements in tracking accuracy and robustness compared to baseline methods that do not leverage ego-motion information. The ego-motion aware module is able to better handle challenging scenarios with rapid camera motion and complex target dynamics.
Critical Analysis
The paper provides a compelling technical solution to an important practical problem in multi-object tracking. Incorporating ego-motion awareness is a sensible way to improve tracking performance, particularly in dynamic environments where both the camera and the tracked objects are in motion.
That said, the evaluation is limited to standard benchmarks and does not explore real-world deployment challenges in depth. There may be additional complexities and edge cases that arise when applying this technique to autonomous vehicles, surveillance systems, or other practical applications.
Additionally, the paper does not delve into the computational overhead or runtime implications of the ego-motion aware prediction module. Integrating this extra processing step could have implications for the overall system latency and efficiency, which are crucial considerations for many real-time tracking use cases.
Further research could explore the robustness of this approach to sensor failures or degradation, as well as its generalization to a wider range of tracking scenarios beyond the benchmarks considered here. Exploring the trade-offs between accuracy gains and computational costs would also be a valuable area for future work.
Conclusion
This paper presents a novel "Ego-Motion Aware Target Prediction Module" that can be used to enhance the performance of multi-object tracking systems. By incorporating information about the camera's own movements, the tracking can make smarter predictions about the future locations of the target objects, leading to more robust and accurate results.
The technical approach is sound, and the evaluation on standard benchmarks demonstrates clear improvements over baseline methods. While there are some open questions around practical deployment challenges and computational costs, this work represents an important step forward in making multi-object tracking more reliable and effective, especially in dynamic environments where both the camera and the tracked objects are in motion.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

ETTrack: Enhanced Temporal Motion Predictor for Multi-Object Tracking
Xudong Han, Nobuyuki Oishi, Yueying Tian, Elif Ucurum, Rupert Young, Chris Chatwin, Philip Birch
0
0
Many Multi-Object Tracking (MOT) approaches exploit motion information to associate all the detected objects across frames. However, many methods that rely on filtering-based algorithms, such as the Kalman Filter, often work well in linear motion scenarios but struggle to accurately predict the locations of objects undergoing complex and non-linear movements. To tackle these scenarios, we propose a motion-based MOT approach with an enhanced temporal motion predictor, ETTrack. Specifically, the motion predictor integrates a transformer model and a Temporal Convolutional Network (TCN) to capture short-term and long-term motion patterns, and it predicts the future motion of individual objects based on the historical motion information. Additionally, we propose a novel Momentum Correction Loss function that provides additional information regarding the motion direction of objects during training. This allows the motion predictor rapidly adapt to motion variations and more accurately predict future motion. Our experimental results demonstrate that ETTrack achieves a competitive performance compared with state-of-the-art trackers on DanceTrack and SportsMOT, scoring 56.4% and 74.4% in HOTA metrics, respectively.
5/27/2024

Motor Focus: Ego-Motion Prediction with All-Pixel Matching
Hao Wang, Jiayou Qin, Xiwen Chen, Ashish Bastola, John Suchanek, Zihao Gong, Abolfazl Razi
0
0
Motion analysis plays a critical role in various applications, from virtual reality and augmented reality to assistive visual navigation. Traditional self-driving technologies, while advanced, typically do not translate directly to pedestrian applications due to their reliance on extensive sensor arrays and non-feasible computational frameworks. This highlights a significant gap in applying these solutions to human users since human navigation introduces unique challenges, including the unpredictable nature of human movement, limited processing capabilities of portable devices, and the need for directional responsiveness due to the limited perception range of humans. In this project, we introduce an image-only method that applies motion analysis using optical flow with ego-motion compensation to predict Motor Focus-where and how humans or machines focus their movement intentions. Meanwhile, this paper addresses the camera shaking issue in handheld and body-mounted devices which can severely degrade performance and accuracy, by applying a Gaussian aggregation to stabilize the predicted motor focus area and enhance the prediction accuracy of movement direction. This also provides a robust, real-time solution that adapts to the user's immediate environment. Furthermore, in the experiments part, we show the qualitative analysis of motor focus estimation between the conventional dense optical flow-based method and the proposed method. In quantitative tests, we show the performance of the proposed method on a collected small dataset that is specialized for motor focus estimation tasks.
4/29/2024

Multi-Object Tracking with Camera-LiDAR Fusion for Autonomous Driving
Riccardo Pieroni, Simone Specchia, Matteo Corno, Sergio Matteo Savaresi
0
0
This paper presents a novel multi-modal Multi-Object Tracking (MOT) algorithm for self-driving cars that combines camera and LiDAR data. Camera frames are processed with a state-of-the-art 3D object detector, whereas classical clustering techniques are used to process LiDAR observations. The proposed MOT algorithm comprises a three-step association process, an Extended Kalman filter for estimating the motion of each detected dynamic obstacle, and a track management phase. The EKF motion model requires the current measured relative position and orientation of the observed object and the longitudinal and angular velocities of the ego vehicle as inputs. Unlike most state-of-the-art multi-modal MOT approaches, the proposed algorithm does not rely on maps or knowledge of the ego global pose. Moreover, it uses a 3D detector exclusively for cameras and is agnostic to the type of LiDAR sensor used. The algorithm is validated both in simulation and with real-world data, with satisfactory results.
5/14/2024
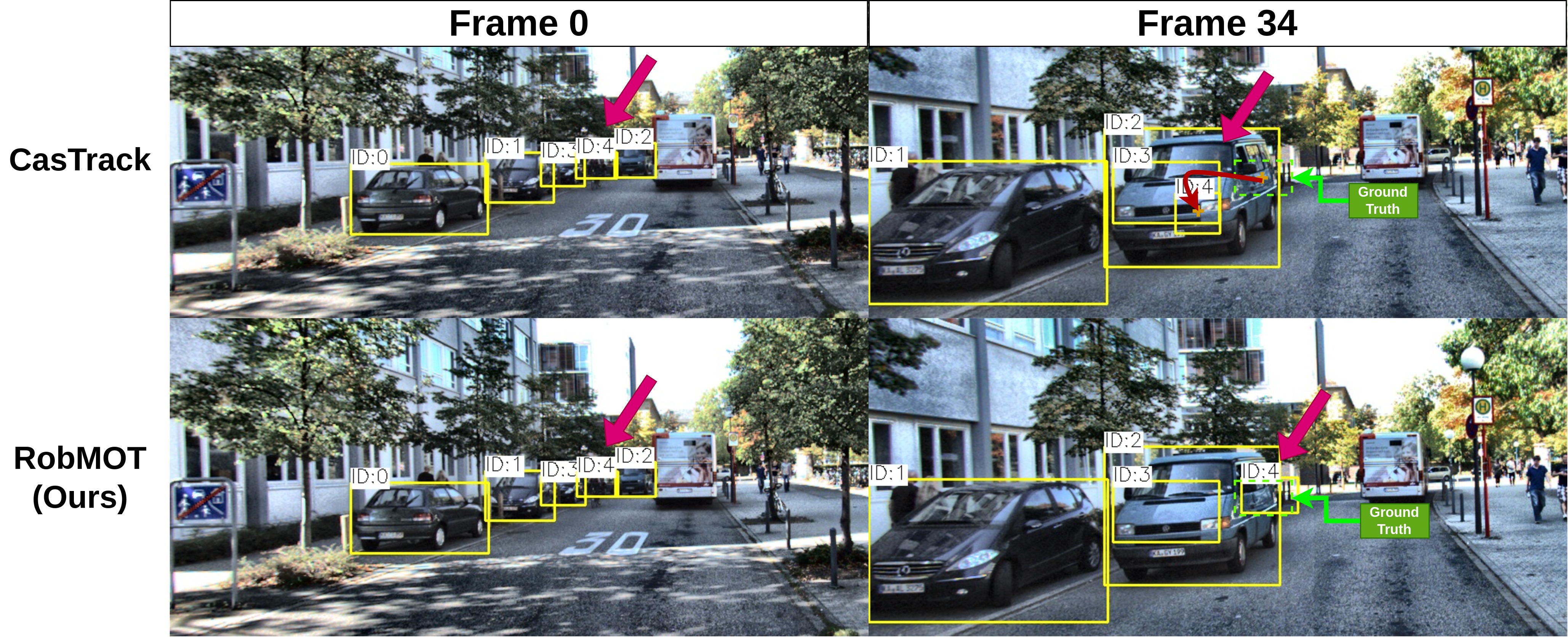
RobMOT: Robust 3D Multi-Object Tracking by Observational Noise and State Estimation Drift Mitigation on LiDAR PointCloud
Mohamed Nagy, Naoufel Werghi, Bilal Hassan, Jorge Dias, Majid Khonji
0
0
This work addresses limitations in recent 3D tracking-by-detection methods, focusing on identifying legitimate trajectories and addressing state estimation drift in Kalman filters. Current methods rely heavily on threshold-based filtering of false positive detections using detection scores to prevent ghost trajectories. However, this approach is inadequate for distant and partially occluded objects, where detection scores tend to drop, potentially leading to false positives exceeding the threshold. Additionally, the literature generally treats detections as precise localizations of objects. Our research reveals that noise in detections impacts localization information, causing trajectory drift for occluded objects and hindering recovery. To this end, we propose a novel online track validity mechanism that temporally distinguishes between legitimate and ghost tracks, along with a multi-stage observational gating process for incoming observations. This mechanism significantly improves tracking performance, with a $6.28%$ in HOTA and a $17.87%$ increase in MOTA. We also introduce a refinement to the Kalman filter that enhances noise mitigation in trajectory drift, leading to more robust state estimation for occluded objects. Our framework, RobMOT, outperforms state-of-the-art methods, including deep learning approaches, across various detectors, achieving up to a $4%$ margin in HOTA and $6%$ in MOTA. RobMOT excels under challenging conditions, such as prolonged occlusions and tracking distant objects, with up to a 59% improvement in processing latency.
6/21/2024