ETTrack: Enhanced Temporal Motion Predictor for Multi-Object Tracking

0

Sign in to get full access
Overview
- The paper introduces ETTrack, an Enhanced Temporal Motion Predictor for Multi-Object Tracking (MOT)
- ETTrack aims to improve tracking accuracy by incorporating a novel temporal motion prediction module
- The model leverages detection and tracking uncertainty to enhance the temporal motion prediction process
- Experiments show ETTrack outperforms state-of-the-art MOT methods on multiple benchmarks
Plain English Explanation
ETTrack is a new approach to multi-object tracking that focuses on improving the accuracy of predicting the future motion of tracked objects. Many existing tracking methods struggle to accurately anticipate how objects will move, which can lead to objects being lost or mismatched as the tracking progresses.
ETTrack addresses this by incorporating a specialized "temporal motion prediction" module that examines factors like detection uncertainty and past motion patterns to better forecast an object's future trajectory. This helps the tracker stay locked onto the right targets even as they move around the scene.
The authors demonstrate that ETTrack outperforms other leading multi-object tracking algorithms on standard benchmarks. By more reliably predicting object motion, it is able to keep track of multiple objects simultaneously with higher accuracy.
Technical Explanation
The core innovation in ETTrack is the Ego-Motion Aware Target Prediction Module, which uses past motion data and detection uncertainty to forecast an object's future location. This module is integrated into a larger multi-object tracking pipeline that also leverages techniques like Uncertainty-based object detection and localization and collaborative multi-object tracking.
The temporal motion prediction process in ETTrack involves several steps. First, it extracts features from the object's past trajectory using a recurrent neural network. It then factors in the object's current detection uncertainty, which provides information about how reliably the object has been localized. These inputs are fed into a mixture of experts model that learns to predict the object's future position and velocity.
Experiments show that this enhanced motion prediction capability allows ETTrack to more accurately track objects, even in scenarios with long-tailed trajectory distributions that pose challenges for other trackers.
Critical Analysis
The authors provide a thorough evaluation of ETTrack, demonstrating its advantages over prior work on multiple public benchmarks. However, they also acknowledge several limitations:
- The motion prediction module relies on accurate object detection, so its performance may degrade in challenging scenes with heavy occlusion or visual clutter.
- The mixture of experts approach adds some computational complexity, which could impact real-time performance on resource-constrained platforms.
- The paper focuses on 2D multi-object tracking, but the techniques could potentially be extended to 3D tracking as well.
Further research could explore ways to make the motion prediction more robust to detection errors, or to adapt the approach for efficient online tracking in embedded applications. Overall, ETTrack represents an interesting advance in the field of multi-object tracking by emphasizing the importance of accurate temporal prediction.
Conclusion
ETTrack introduces a novel temporal motion prediction module that enhances the accuracy of multi-object tracking. By leveraging object detection uncertainty and past motion patterns, the model is able to more reliably forecast the future trajectory of tracked targets. This in turn improves the overall tracking performance, as demonstrated on standard benchmarks.
The core ideas behind ETTrack, such as the use of mixture-of-experts modeling and incorporating uncertainty information, could inspire further innovations in the field of multi-object tracking. As real-world applications continue to demand more robust and reliable tracking capabilities, advancements like those presented in this paper will be important for pushing the state of the art forward.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ETTrack: Enhanced Temporal Motion Predictor for Multi-Object Tracking
Xudong Han, Nobuyuki Oishi, Yueying Tian, Elif Ucurum, Rupert Young, Chris Chatwin, Philip Birch
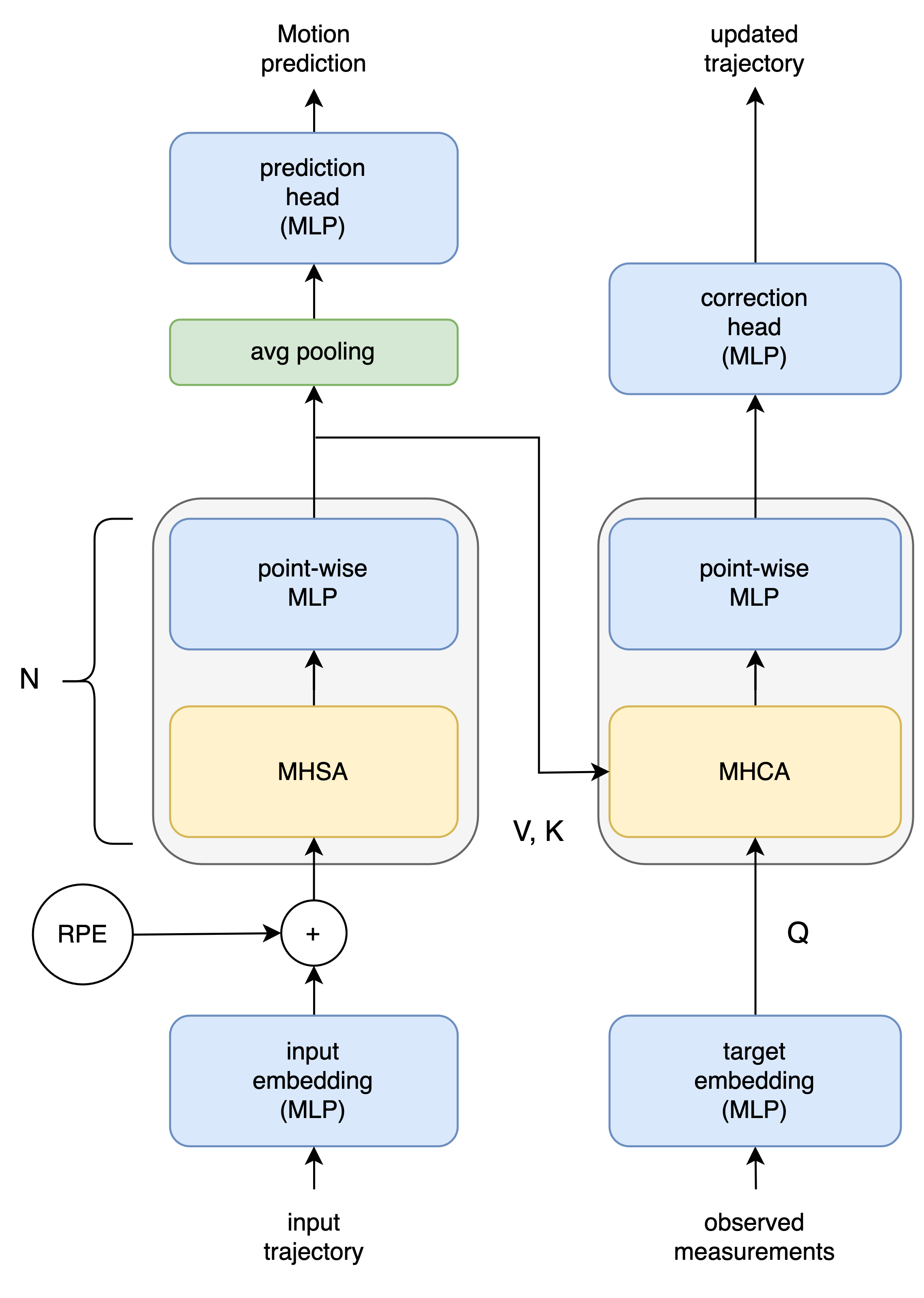
Many Multi-Object Tracking (MOT) approaches exploit motion information to associate all the detected objects across frames. However, many methods that rely on filtering-based algorithms, such as the Kalman Filter, often work well in linear motion scenarios but struggle to accurately predict the locations of objects undergoing complex and non-linear movements. To tackle these scenarios, we propose a motion-based MOT approach with an enhanced temporal motion predictor, ETTrack. Specifically, the motion predictor integrates a transformer model and a Temporal Convolutional Network (TCN) to capture short-term and long-term motion patterns, and it predicts the future motion of individual objects based on the historical motion information. Additionally, we propose a novel Momentum Correction Loss function that provides additional information regarding the motion direction of objects during training. This allows the motion predictor rapidly adapt to motion variations and more accurately predict future motion. Our experimental results demonstrate that ETTrack achieves a competitive performance compared with state-of-the-art trackers on DanceTrack and SportsMOT, scoring 56.4% and 74.4% in HOTA metrics, respectively.
Read more5/27/2024

0
Ego-Motion Aware Target Prediction Module for Robust Multi-Object Tracking
Navid Mahdian, Mohammad Jani, Amir M. Soufi Enayati, Homayoun Najjaran
Multi-object tracking (MOT) is a prominent task in computer vision with application in autonomous driving, responsible for the simultaneous tracking of multiple object trajectories. Detection-based multi-object tracking (DBT) algorithms detect objects using an independent object detector and predict the imminent location of each target. Conventional prediction methods in DBT utilize Kalman Filter(KF) to extrapolate the target location in the upcoming frames by supposing a constant velocity motion model. These methods are especially hindered in autonomous driving applications due to dramatic camera motion or unavailable detections. Such limitations lead to tracking failures manifested by numerous identity switches and disrupted trajectories. In this paper, we introduce a novel KF-based prediction module called the Ego-motion Aware Target Prediction (EMAP) module by focusing on the integration of camera motion and depth information with object motion models. Our proposed method decouples the impact of camera rotational and translational velocity from the object trajectories by reformulating the Kalman Filter. This reformulation enables us to reject the disturbances caused by camera motion and maximizes the reliability of the object motion model. We integrate our module with four state-of-the-art base MOT algorithms, namely OC-SORT, Deep OC-SORT, ByteTrack, and BoT-SORT. In particular, our evaluation on the KITTI MOT dataset demonstrates that EMAP remarkably drops the number of identity switches (IDSW) of OC-SORT and Deep OC-SORT by 73% and 21%, respectively. At the same time, it elevates other performance metrics such as HOTA by more than 5%. Our source code is available at https://github.com/noyzzz/EMAP.
Read more4/5/2024

0
MambaTrack: A Simple Baseline for Multiple Object Tracking with State Space Model
Changcheng Xiao, Qiong Cao, Zhigang Luo, Long Lan
Tracking by detection has been the prevailing paradigm in the field of Multi-object Tracking (MOT). These methods typically rely on the Kalman Filter to estimate the future locations of objects, assuming linear object motion. However, they fall short when tracking objects exhibiting nonlinear and diverse motion in scenarios like dancing and sports. In addition, there has been limited focus on utilizing learning-based motion predictors in MOT. To address these challenges, we resort to exploring data-driven motion prediction methods. Inspired by the great expectation of state space models (SSMs), such as Mamba, in long-term sequence modeling with near-linear complexity, we introduce a Mamba-based motion model named Mamba moTion Predictor (MTP). MTP is designed to model the complex motion patterns of objects like dancers and athletes. Specifically, MTP takes the spatial-temporal location dynamics of objects as input, captures the motion pattern using a bi-Mamba encoding layer, and predicts the next motion. In real-world scenarios, objects may be missed due to occlusion or motion blur, leading to premature termination of their trajectories. To tackle this challenge, we further expand the application of MTP. We employ it in an autoregressive way to compensate for missing observations by utilizing its own predictions as inputs, thereby contributing to more consistent trajectories. Our proposed tracker, MambaTrack, demonstrates advanced performance on benchmarks such as Dancetrack and SportsMOT, which are characterized by complex motion and severe occlusion.
Read more8/20/2024
0
Engineering an Efficient Object Tracker for Non-Linear Motion
Momir Adv{z}emovi'c, Predrag Tadi'c, Andrija Petrovi'c, Mladen Nikoli'c
The goal of multi-object tracking is to detect and track all objects in a scene while maintaining unique identifiers for each, by associating their bounding boxes across video frames. This association relies on matching motion and appearance patterns of detected objects. This task is especially hard in case of scenarios involving dynamic and non-linear motion patterns. In this paper, we introduce DeepMoveSORT, a novel, carefully engineered multi-object tracker designed specifically for such scenarios. In addition to standard methods of appearance-based association, we improve motion-based association by employing deep learnable filters (instead of the most commonly used Kalman filter) and a rich set of newly proposed heuristics. Our improvements to motion-based association methods are severalfold. First, we propose a new transformer-based filter architecture, TransFilter, which uses an object's motion history for both motion prediction and noise filtering. We further enhance the filter's performance by careful handling of its motion history and accounting for camera motion. Second, we propose a set of heuristics that exploit cues from the position, shape, and confidence of detected bounding boxes to improve association performance. Our experimental evaluation demonstrates that DeepMoveSORT outperforms existing trackers in scenarios featuring non-linear motion, surpassing state-of-the-art results on three such datasets. We also perform a thorough ablation study to evaluate the contributions of different tracker components which we proposed. Based on our study, we conclude that using a learnable filter instead of the Kalman filter, along with appearance-based association is key to achieving strong general tracking performance.
Read more7/2/2024