A Neuromorphic Approach to Obstacle Avoidance in Robot Manipulation
2404.05858
0
0

Abstract
Neuromorphic computing mimics computational principles of the brain in $textit{silico}$ and motivates research into event-based vision and spiking neural networks (SNNs). Event cameras (ECs) exclusively capture local intensity changes and offer superior power consumption, response latencies, and dynamic ranges. SNNs replicate biological neuronal dynamics and have demonstrated potential as alternatives to conventional artificial neural networks (ANNs), such as in reducing energy expenditure and inference time in visual classification. Nevertheless, these novel paradigms remain scarcely explored outside the domain of aerial robots. To investigate the utility of brain-inspired sensing and data processing, we developed a neuromorphic approach to obstacle avoidance on a camera-equipped manipulator. Our approach adapts high-level trajectory plans with reactive maneuvers by processing emulated event data in a convolutional SNN, decoding neural activations into avoidance motions, and adjusting plans using a dynamic motion primitive. We conducted experiments with a Kinova Gen3 arm performing simple reaching tasks that involve obstacles in sets of distinct task scenarios and in comparison to a non-adaptive baseline. Our neuromorphic approach facilitated reliable avoidance of imminent collisions in simulated and real-world experiments, where the baseline consistently failed. Trajectory adaptations had low impacts on safety and predictability criteria. Among the notable SNN properties were the correlation of computations with the magnitude of perceived motions and a robustness to different event emulation methods. Tests with a DAVIS346 EC showed similar performance, validating our experimental event emulation. Our results motivate incorporating SNN learning, utilizing neuromorphic processors, and further exploring the potential of neuromorphic methods.
Create account to get full access
Overview
- This paper presents a neuromorphic approach to obstacle avoidance in robot manipulation.
- It explores the use of event cameras and spiking neural networks to enable robots to quickly and efficiently navigate around obstacles.
- The proposed system is designed to mimic the human visual system, with a focus on neuromorphic computing and real-time response.
Plain English Explanation
The paper describes a new way for robots to avoid obstacles during manipulation tasks. Instead of relying on traditional cameras, the researchers used a special type of camera called an "event camera." Event cameras work differently than regular cameras - they don't capture full images, but instead only register changes in the scene. This allows them to respond much faster to moving objects, like obstacles.
The researchers then used a type of artificial intelligence called a "spiking neural network" to process the information from the event camera. Spiking neural networks are inspired by the way the human brain works, using rapid electrical pulses (or "spikes") to transmit information. This allows the system to react and make decisions very quickly, just like the human visual system.
By combining the event camera and the spiking neural network, the researchers were able to create a robotic system that could navigate around obstacles in real-time, without getting stuck or crashing. This could be especially useful for robots working in dynamic, unpredictable environments, where they need to be able to react quickly to changes.
Technical Explanation
The paper presents a neuromorphic computing approach to obstacle avoidance in robot manipulation. The key components of the system are:
-
Event Cameras: The system uses event cameras to capture visual information. Event cameras are bioinspired sensors that encode visual information as a stream of asynchronous "events" corresponding to local pixel-level brightness changes, rather than traditional frame-based RGB images.
-
Spiking Neural Networks: The visual information from the event camera is processed by a spiking neural network, which is a type of neuromorphic computing architecture that mimics the information processing in biological neural networks using discrete voltage pulses ("spikes") to transmit information.
-
Obstacle Avoidance: The spiking neural network is trained to detect obstacles in the robot's environment and generate appropriate motor commands to navigate around them, enabling the robot to perform manipulation tasks while avoiding collisions.
The paper evaluates the proposed neuromorphic approach through a series of experiments on a robotic manipulator platform. The results demonstrate that the event camera-based spiking neural network system can effectively and efficiently navigate around obstacles, outperforming traditional frame-based computer vision approaches in terms of real-time response and energy efficiency.
Critical Analysis
The paper presents a compelling neuromorphic approach to obstacle avoidance that leverages the unique capabilities of event cameras and spiking neural networks. However, the research does not address several important limitations and areas for further investigation:
-
Sensor Limitations: Event cameras have limited spatial resolution and dynamic range compared to traditional cameras, which could impact their performance in complex scenes with varied lighting conditions.
-
Training Data: The paper does not provide details on the training dataset used to teach the spiking neural network, which could be an important factor in the system's generalization to diverse obstacle scenarios.
-
Hardware Integration: While the paper demonstrates the feasibility of the neuromorphic approach in simulation, the challenges of integrating event cameras and spiking neural network hardware on real robotic platforms are not discussed.
-
Scalability: The paper focuses on a single robotic manipulator; further research is needed to evaluate the scalability of the approach to more complex, multi-robot systems.
-
Safety and Reliability: The paper does not address crucial issues of safety and reliability that would be essential for deploying such a system in real-world applications, such as industrial environments or autonomous vehicles.
Conclusion
This paper presents a promising neuromorphic approach to obstacle avoidance in robot manipulation, leveraging the speed and efficiency of event cameras and spiking neural networks. By mimicking the human visual system, the proposed system demonstrates the potential of neuromorphic computing to enable robots to navigate dynamic environments in real-time.
While the research shows encouraging results, further work is needed to address the limitations and challenges highlighted in the critical analysis. Addressing sensor capabilities, training data, hardware integration, scalability, and safety considerations will be crucial for transitioning this neuromorphic approach from the lab to real-world robotics applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
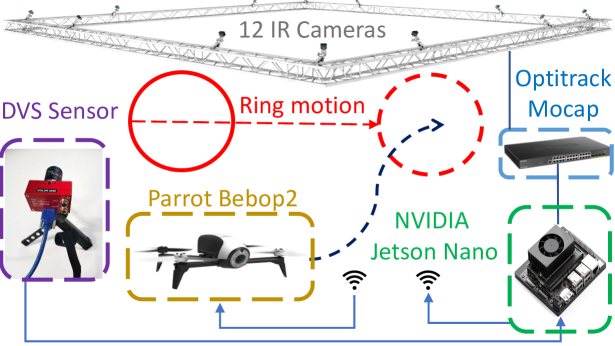
New!Real-Time Neuromorphic Navigation: Integrating Event-Based Vision and Physics-Driven Planning on a Parrot Bebop2 Quadrotor
Amogh Joshi, Sourav Sanyal, Kaushik Roy
0
0
In autonomous aerial navigation, real-time and energy-efficient obstacle avoidance remains a significant challenge, especially in dynamic and complex indoor environments. This work presents a novel integration of neuromorphic event cameras with physics-driven planning algorithms implemented on a Parrot Bebop2 quadrotor. Neuromorphic event cameras, characterized by their high dynamic range and low latency, offer significant advantages over traditional frame-based systems, particularly in poor lighting conditions or during high-speed maneuvers. We use a DVS camera with a shallow Spiking Neural Network (SNN) for event-based object detection of a moving ring in real-time in an indoor lab. Further, we enhance drone control with physics-guided empirical knowledge inside a neural network training mechanism, to predict energy-efficient flight paths to fly through the moving ring. This integration results in a real-time, low-latency navigation system capable of dynamically responding to environmental changes while minimizing energy consumption. We detail our hardware setup, control loop, and modifications necessary for real-world applications, including the challenges of sensor integration without burdening the flight capabilities. Experimental results demonstrate the effectiveness of our approach in achieving robust, collision-free, and energy-efficient flight paths, showcasing the potential of neuromorphic vision and physics-driven planning in enhancing autonomous navigation systems.
7/2/2024
🏷️
Neuromorphic Face Analysis: a Survey
Federico Becattini, Lorenzo Berlincioni, Luca Cultrera, Alberto Del Bimbo
0
0
Neuromorphic sensors, also known as event cameras, are a class of imaging devices mimicking the function of biological visual systems. Unlike traditional frame-based cameras, which capture fixed images at discrete intervals, neuromorphic sensors continuously generate events that represent changes in light intensity or motion in the visual field with high temporal resolution and low latency. These properties have proven to be interesting in modeling human faces, both from an effectiveness and a privacy-preserving point of view. Neuromorphic face analysis however is still a raw and unstructured field of research, with several attempts at addressing different tasks with no clear standard or benchmark. This survey paper presents a comprehensive overview of capabilities, challenges and emerging applications in the domain of neuromorphic face analysis, to outline promising directions and open issues. After discussing the fundamental working principles of neuromorphic vision and presenting an in-depth overview of the related research, we explore the current state of available data, standard data representations, emerging challenges, and limitations that require further investigation. This paper aims to highlight the recent process in this evolving field to provide to both experienced and newly come researchers an all-encompassing analysis of the state of the art along with its problems and shortcomings.
4/23/2024
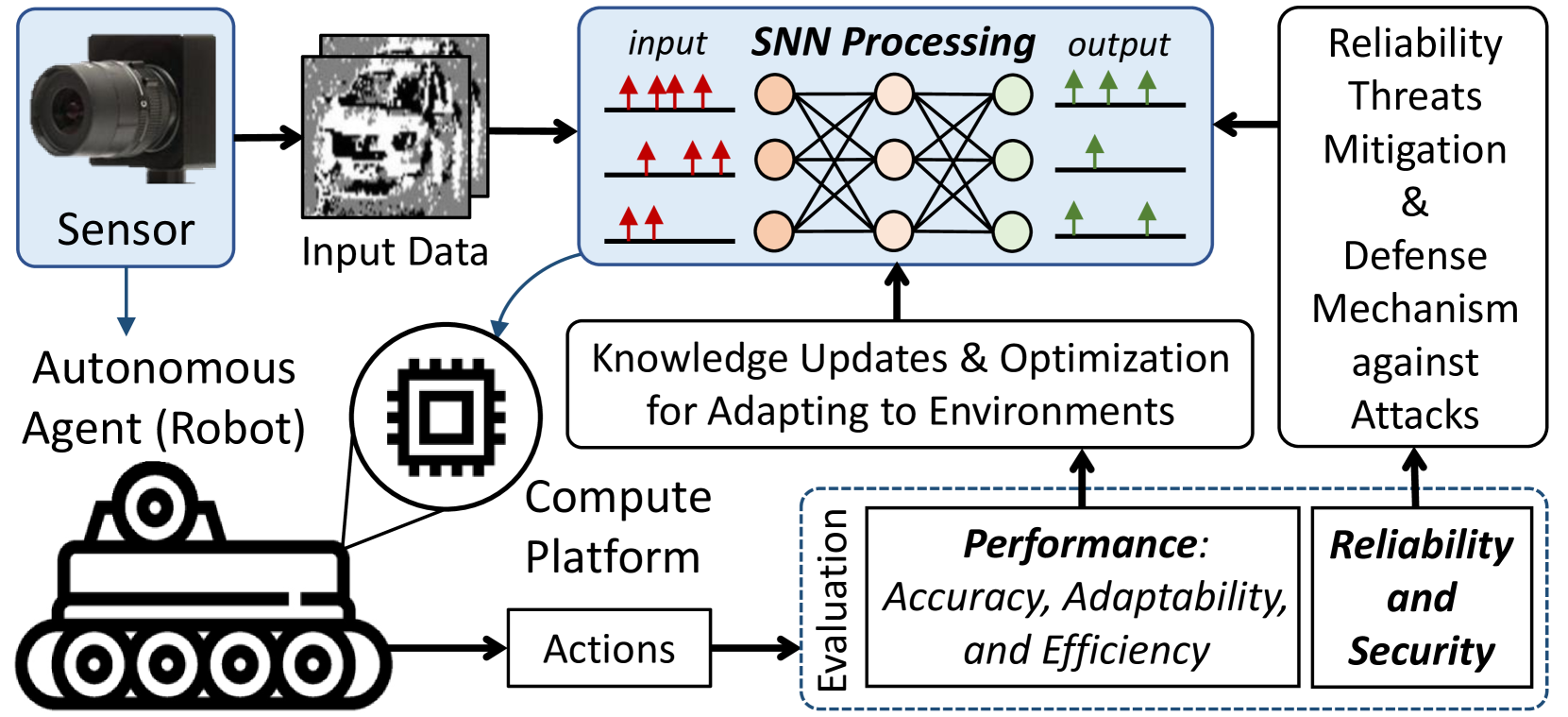
Embodied Neuromorphic Artificial Intelligence for Robotics: Perspectives, Challenges, and Research Development Stack
Rachmad Vidya Wicaksana Putra, Alberto Marchisio, Fakhreddine Zayer, Jorge Dias, Muhammad Shafique
0
0
Robotic technologies have been an indispensable part for improving human productivity since they have been helping humans in completing diverse, complex, and intensive tasks in a fast yet accurate and efficient way. Therefore, robotic technologies have been deployed in a wide range of applications, ranging from personal to industrial use-cases. However, current robotic technologies and their computing paradigm still lack embodied intelligence to efficiently interact with operational environments, respond with correct/expected actions, and adapt to changes in the environments. Toward this, recent advances in neuromorphic computing with Spiking Neural Networks (SNN) have demonstrated the potential to enable the embodied intelligence for robotics through bio-plausible computing paradigm that mimics how the biological brain works, known as neuromorphic artificial intelligence (AI). However, the field of neuromorphic AI-based robotics is still at an early stage, therefore its development and deployment for solving real-world problems expose new challenges in different design aspects, such as accuracy, adaptability, efficiency, reliability, and security. To address these challenges, this paper will discuss how we can enable embodied neuromorphic AI for robotic systems through our perspectives: (P1) Embodied intelligence based on effective learning rule, training mechanism, and adaptability; (P2) Cross-layer optimizations for energy-efficient neuromorphic computing; (P3) Representative and fair benchmarks; (P4) Low-cost reliability and safety enhancements; (P5) Security and privacy for neuromorphic computing; and (P6) A synergistic development for energy-efficient and robust neuromorphic-based robotics. Furthermore, this paper identifies research challenges and opportunities, as well as elaborates our vision for future research development toward embodied neuromorphic AI for robotics.
4/5/2024

Microsaccade-inspired Event Camera for Robotics
Botao He, Ze Wang, Yuan Zhou, Jingxi Chen, Chahat Deep Singh, Haojia Li, Yuman Gao, Shaojie Shen, Kaiwei Wang, Yanjun Cao, Chao Xu, Yiannis Aloimonos, Fei Gao, Cornelia Fermuller
0
0
Neuromorphic vision sensors or event cameras have made the visual perception of extremely low reaction time possible, opening new avenues for high-dynamic robotics applications. These event cameras' output is dependent on both motion and texture. However, the event camera fails to capture object edges that are parallel to the camera motion. This is a problem intrinsic to the sensor and therefore challenging to solve algorithmically. Human vision deals with perceptual fading using the active mechanism of small involuntary eye movements, the most prominent ones called microsaccades. By moving the eyes constantly and slightly during fixation, microsaccades can substantially maintain texture stability and persistence. Inspired by microsaccades, we designed an event-based perception system capable of simultaneously maintaining low reaction time and stable texture. In this design, a rotating wedge prism was mounted in front of the aperture of an event camera to redirect light and trigger events. The geometrical optics of the rotating wedge prism allows for algorithmic compensation of the additional rotational motion, resulting in a stable texture appearance and high informational output independent of external motion. The hardware device and software solution are integrated into a system, which we call Artificial MIcrosaccade-enhanced EVent camera (AMI-EV). Benchmark comparisons validate the superior data quality of AMI-EV recordings in scenarios where both standard cameras and event cameras fail to deliver. Various real-world experiments demonstrate the potential of the system to facilitate robotics perception both for low-level and high-level vision tasks.
5/29/2024