Enhancing Human-Robot Collaborative Assembly in Manufacturing Systems Using Large Language Models
2406.01915
0
0
Abstract
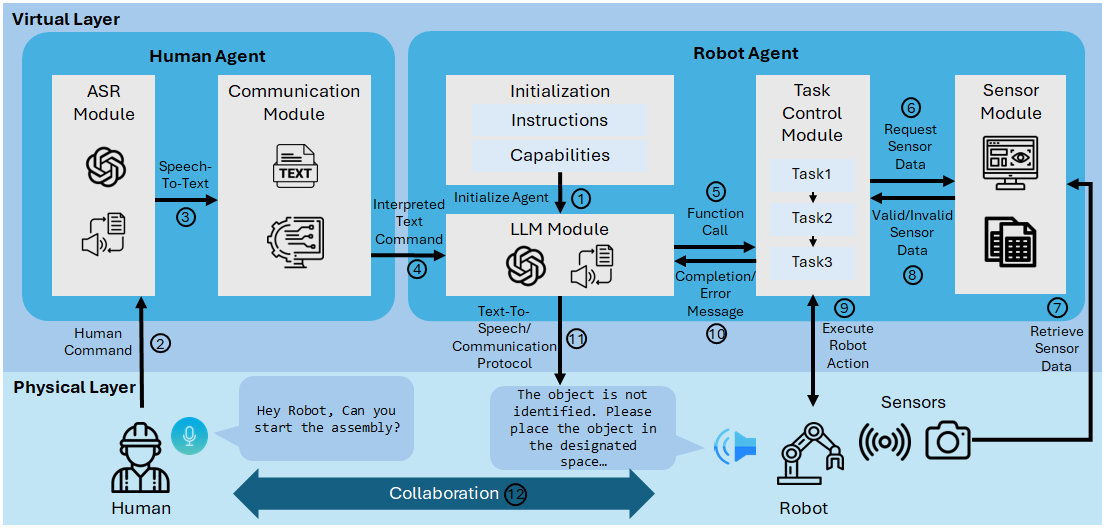
The development of human-robot collaboration has the ability to improve manufacturing system performance by leveraging the unique strengths of both humans and robots. On the shop floor, human operators contribute with their adaptability and flexibility in dynamic situations, while robots provide precision and the ability to perform repetitive tasks. However, the communication gap between human operators and robots limits the collaboration and coordination of human-robot teams in manufacturing systems. Our research presents a human-robot collaborative assembly framework that utilizes a large language model for enhancing communication in manufacturing environments. The framework facilitates human-robot communication by integrating voice commands through natural language for task management. A case study for an assembly task demonstrates the framework's ability to process natural language inputs and address real-time assembly challenges, emphasizing adaptability to language variation and efficiency in error resolution. The results suggest that large language models have the potential to improve human-robot interaction for collaborative manufacturing assembly applications.
Create account to get full access
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Large Language Model-Enabled Multi-Agent Manufacturing Systems
Jonghan Lim, Birgit Vogel-Heuser, Ilya Kovalenko
0
0
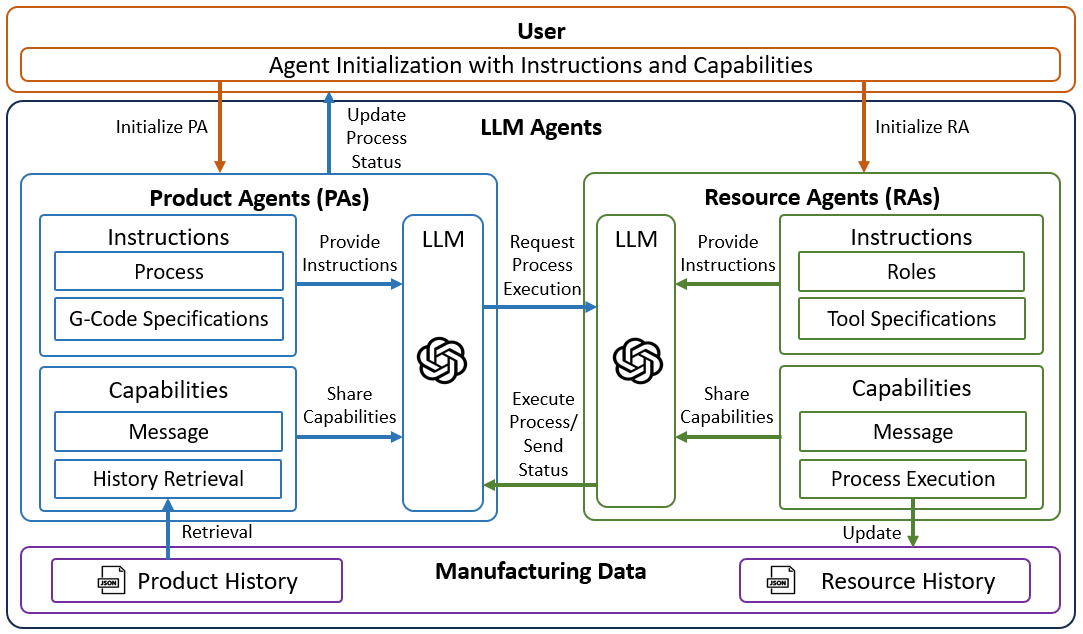
Traditional manufacturing faces challenges adapting to dynamic environments and quickly responding to manufacturing changes. The use of multi-agent systems has improved adaptability and coordination but requires further advancements in rapid human instruction comprehension, operational adaptability, and coordination through natural language integration. Large language models like GPT-3.5 and GPT-4 enhance multi-agent manufacturing systems by enabling agents to communicate in natural language and interpret human instructions for decision-making. This research introduces a novel framework where large language models enhance the capabilities of agents in manufacturing, making them more adaptable, and capable of processing context-specific instructions. A case study demonstrates the practical application of this framework, showing how agents can effectively communicate, understand tasks, and execute manufacturing processes, including precise G-code allocation among agents. The findings highlight the importance of continuous large language model integration into multi-agent manufacturing systems and the development of sophisticated agent communication protocols for a more flexible manufacturing system.
6/24/2024
📈
Enhancing the LLM-Based Robot Manipulation Through Human-Robot Collaboration
Haokun Liu, Yaonan Zhu, Kenji Kato, Atsushi Tsukahara, Izumi Kondo, Tadayoshi Aoyama, Yasuhisa Hasegawa
0
0
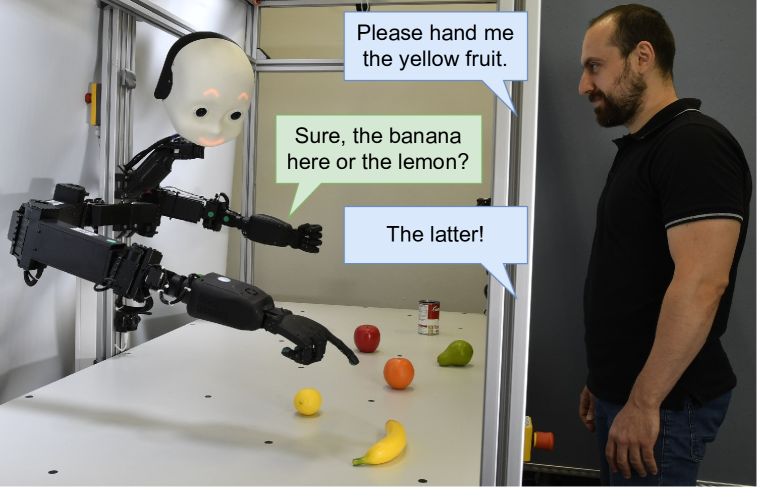
Large Language Models (LLMs) are gaining popularity in the field of robotics. However, LLM-based robots are limited to simple, repetitive motions due to the poor integration between language models, robots, and the environment. This paper proposes a novel approach to enhance the performance of LLM-based autonomous manipulation through Human-Robot Collaboration (HRC). The approach involves using a prompted GPT-4 language model to decompose high-level language commands into sequences of motions that can be executed by the robot. The system also employs a YOLO-based perception algorithm, providing visual cues to the LLM, which aids in planning feasible motions within the specific environment. Additionally, an HRC method is proposed by combining teleoperation and Dynamic Movement Primitives (DMP), allowing the LLM-based robot to learn from human guidance. Real-world experiments have been conducted using the Toyota Human Support Robot for manipulation tasks. The outcomes indicate that tasks requiring complex trajectory planning and reasoning over environments can be efficiently accomplished through the incorporation of human demonstrations.
7/2/2024
💬
Large Language Models for Human-Robot Interaction: Opportunities and Risks
Jesse Atuhurra
0
0
The tremendous development in large language models (LLM) has led to a new wave of innovations and applications and yielded research results that were initially forecast to take longer. In this work, we tap into these recent developments and present a meta-study about the potential of large language models if deployed in social robots. We place particular emphasis on the applications of social robots: education, healthcare, and entertainment. Before being deployed in social robots, we also study how these language models could be safely trained to ``understand'' societal norms and issues, such as trust, bias, ethics, cognition, and teamwork. We hope this study provides a resourceful guide to other robotics researchers interested in incorporating language models in their robots.
5/3/2024
New!When Robots Get Chatty: Grounding Multimodal Human-Robot Conversation and Collaboration
Philipp Allgeuer, Hassan Ali, Stefan Wermter
0
0
We investigate the use of Large Language Models (LLMs) to equip neural robotic agents with human-like social and cognitive competencies, for the purpose of open-ended human-robot conversation and collaboration. We introduce a modular and extensible methodology for grounding an LLM with the sensory perceptions and capabilities of a physical robot, and integrate multiple deep learning models throughout the architecture in a form of system integration. The integrated models encompass various functions such as speech recognition, speech generation, open-vocabulary object detection, human pose estimation, and gesture detection, with the LLM serving as the central text-based coordinating unit. The qualitative and quantitative results demonstrate the huge potential of LLMs in providing emergent cognition and interactive language-oriented control of robots in a natural and social manner.
7/2/2024