When Robots Get Chatty: Grounding Multimodal Human-Robot Conversation and Collaboration
2407.00518
0
0
Abstract
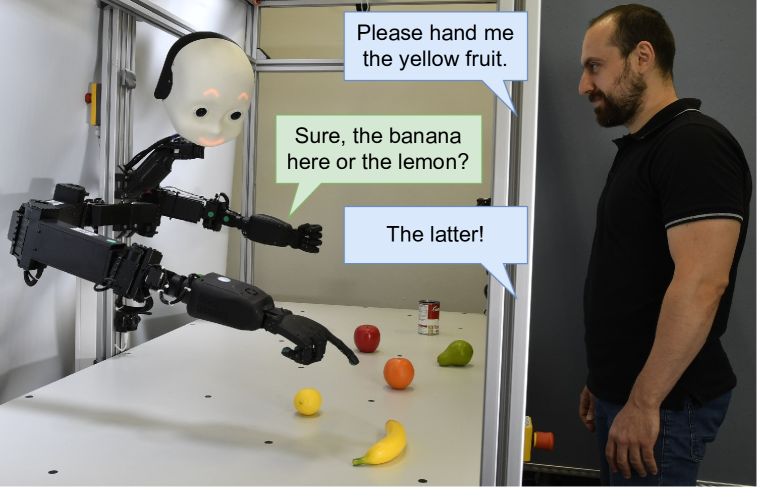
We investigate the use of Large Language Models (LLMs) to equip neural robotic agents with human-like social and cognitive competencies, for the purpose of open-ended human-robot conversation and collaboration. We introduce a modular and extensible methodology for grounding an LLM with the sensory perceptions and capabilities of a physical robot, and integrate multiple deep learning models throughout the architecture in a form of system integration. The integrated models encompass various functions such as speech recognition, speech generation, open-vocabulary object detection, human pose estimation, and gesture detection, with the LLM serving as the central text-based coordinating unit. The qualitative and quantitative results demonstrate the huge potential of LLMs in providing emergent cognition and interactive language-oriented control of robots in a natural and social manner.
Create account to get full access
Overview
• This paper explores the challenges and opportunities in grounding multimodal human-robot conversation and collaboration using large language models (LLMs). • The researchers investigate how LLMs can be integrated with robots to facilitate more natural, contextual, and embodied interactions between humans and machines. • Key topics covered include natural dialog for robots, LLM grounding for AI-enabled robotics, and multimodal interaction between humans and robots.
Plain English Explanation
The paper looks at how robots can have more natural conversations and work better with people by using large language models (LLMs) - powerful AI systems that can understand and generate human-like language.
The researchers explore how LLMs can be integrated with robots to create more seamless and contextual interactions. For example, a robot could use an LLM to understand the meaning behind what a person is saying, not just the literal words. The robot could then formulate an appropriate response, drawing on its knowledge of the physical world and the current situation.
This could allow robots to engage in more natural dialog, where the conversation flows back and forth like it would between two people. The robot could also use multimodal inputs like gestures and the environment to better ground its understanding and responses.
Ultimately, the goal is to make human-robot interactions feel more natural, intuitive, and collaborative - like working with another person rather than just a machine following instructions.
Technical Explanation
The paper explores the integration of large language models (LLMs) with robots to facilitate more grounded, contextual, and multimodal human-robot conversation and collaboration.
The researchers investigate how LLMs can be leveraged to enable robots to:
- Understand the meaning and intent behind human language, not just the literal words
- Draw upon their knowledge of the physical world and current situation to formulate appropriate responses
- Utilize multimodal inputs like gestures and the environment to better ground their understanding and actions
Key technical components include:
- Architectures for seamlessly integrating LLMs with robot perception, reasoning, and action systems
- Techniques for grounding LLM representations in the robot's embodied experiences
- Approaches for incremental learning of robot behavior from natural human-robot interactions
- Multimodal dialog systems that can fluidly switch between verbal, gestural, and environmental communication
The paper presents insights from experiments exploring the capabilities and limitations of these integrated systems, as well as future research directions.
Critical Analysis
The paper provides a comprehensive overview of the key challenges and opportunities in grounding LLMs for more natural and embodied human-robot interaction.
One limitation highlighted is the need for improved methods to ground LLM representations in the robot's physical and social understanding of the world. Current techniques may struggle with the complexities of real-world environments and interactions.
Additionally, the paper notes the difficulty of incremental learning of robot behavior from open-ended human interactions, which may require novel machine learning approaches.
While the paper explores multimodal dialog systems that can fluidly switch communication channels, further research is needed to ensure these capabilities are robust and reliable across diverse situations.
Overall, the work highlights the significant potential of integrating LLMs with robotics, but also emphasizes the need for continued innovation to fully realize the vision of natural, contextual, and embodied human-robot interaction.
Conclusion
This paper presents a compelling exploration of the challenges and opportunities in grounding LLMs for more natural and embodied human-robot conversation and collaboration.
The researchers demonstrate how LLMs can be leveraged to enable robots to better understand the meaning and intent behind human language, draw upon their knowledge of the physical world, and utilize multimodal inputs to engage in more contextual and fluid interactions.
While current techniques have limitations, the work highlights the significant potential of this approach to transform the way humans and robots communicate and work together. Continued advancements in areas like grounding LLM representations, incremental learning, and multimodal dialog systems could pave the way for a future where robots and humans interact in a more natural, intuitive, and collaborative manner.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
A Survey on Integration of Large Language Models with Intelligent Robots
Yeseung Kim, Dohyun Kim, Jieun Choi, Jisang Park, Nayoung Oh, Daehyung Park
0
0
In recent years, the integration of large language models (LLMs) has revolutionized the field of robotics, enabling robots to communicate, understand, and reason with human-like proficiency. This paper explores the multifaceted impact of LLMs on robotics, addressing key challenges and opportunities for leveraging these models across various domains. By categorizing and analyzing LLM applications within core robotics elements -- communication, perception, planning, and control -- we aim to provide actionable insights for researchers seeking to integrate LLMs into their robotic systems. Our investigation focuses on LLMs developed post-GPT-3.5, primarily in text-based modalities while also considering multimodal approaches for perception and control. We offer comprehensive guidelines and examples for prompt engineering, facilitating beginners' access to LLM-based robotics solutions. Through tutorial-level examples and structured prompt construction, we illustrate how LLM-guided enhancements can be seamlessly integrated into robotics applications. This survey serves as a roadmap for researchers navigating the evolving landscape of LLM-driven robotics, offering a comprehensive overview and practical guidance for harnessing the power of language models in robotics development.
6/26/2024
LaMI: Large Language Models for Multi-Modal Human-Robot Interaction
Chao Wang, Stephan Hasler, Daniel Tanneberg, Felix Ocker, Frank Joublin, Antonello Ceravola, Joerg Deigmoeller, Michael Gienger
0
0
This paper presents an innovative large language model (LLM)-based robotic system for enhancing multi-modal human-robot interaction (HRI). Traditional HRI systems relied on complex designs for intent estimation, reasoning, and behavior generation, which were resource-intensive. In contrast, our system empowers researchers and practitioners to regulate robot behavior through three key aspects: providing high-level linguistic guidance, creating atomic actions and expressions the robot can use, and offering a set of examples. Implemented on a physical robot, it demonstrates proficiency in adapting to multi-modal inputs and determining the appropriate manner of action to assist humans with its arms, following researchers' defined guidelines. Simultaneously, it coordinates the robot's lid, neck, and ear movements with speech output to produce dynamic, multi-modal expressions. This showcases the system's potential to revolutionize HRI by shifting from conventional, manual state-and-flow design methods to an intuitive, guidance-based, and example-driven approach. Supplementary material can be found at https://hri-eu.github.io/Lami/
4/12/2024
💬
Large Language Models for Human-Robot Interaction: Opportunities and Risks
Jesse Atuhurra
0
0
The tremendous development in large language models (LLM) has led to a new wave of innovations and applications and yielded research results that were initially forecast to take longer. In this work, we tap into these recent developments and present a meta-study about the potential of large language models if deployed in social robots. We place particular emphasis on the applications of social robots: education, healthcare, and entertainment. Before being deployed in social robots, we also study how these language models could be safely trained to ``understand'' societal norms and issues, such as trust, bias, ethics, cognition, and teamwork. We hope this study provides a resourceful guide to other robotics researchers interested in incorporating language models in their robots.
5/3/2024
🌿
Incremental Learning of Humanoid Robot Behavior from Natural Interaction and Large Language Models
Leonard Barmann, Rainer Kartmann, Fabian Peller-Konrad, Jan Niehues, Alex Waibel, Tamim Asfour
0
0
Natural-language dialog is key for intuitive human-robot interaction. It can be used not only to express humans' intents, but also to communicate instructions for improvement if a robot does not understand a command correctly. Of great importance is to endow robots with the ability to learn from such interaction experience in an incremental way to allow them to improve their behaviors or avoid mistakes in the future. In this paper, we propose a system to achieve incremental learning of complex behavior from natural interaction, and demonstrate its implementation on a humanoid robot. Building on recent advances, we present a system that deploys Large Language Models (LLMs) for high-level orchestration of the robot's behavior, based on the idea of enabling the LLM to generate Python statements in an interactive console to invoke both robot perception and action. The interaction loop is closed by feeding back human instructions, environment observations, and execution results to the LLM, thus informing the generation of the next statement. Specifically, we introduce incremental prompt learning, which enables the system to interactively learn from its mistakes. For that purpose, the LLM can call another LLM responsible for code-level improvements of the current interaction based on human feedback. The improved interaction is then saved in the robot's memory, and thus retrieved on similar requests. We integrate the system in the robot cognitive architecture of the humanoid robot ARMAR-6 and evaluate our methods both quantitatively (in simulation) and qualitatively (in simulation and real-world) by demonstrating generalized incrementally-learned knowledge.
5/17/2024