Equivariant Graph Neural Operator for Modeling 3D Dynamics
2401.11037
0
0
Abstract
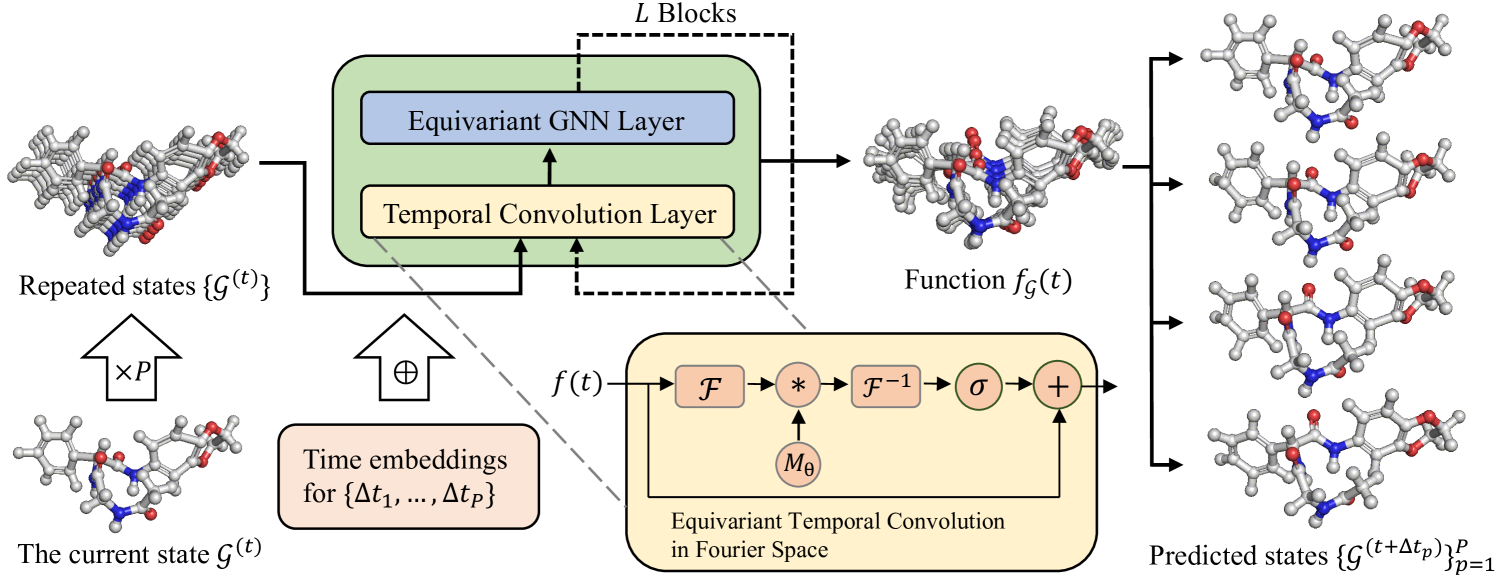
Modeling the complex three-dimensional (3D) dynamics of relational systems is an important problem in the natural sciences, with applications ranging from molecular simulations to particle mechanics. Machine learning methods have achieved good success by learning graph neural networks to model spatial interactions. However, these approaches do not faithfully capture temporal correlations since they only model next-step predictions. In this work, we propose Equivariant Graph Neural Operator (EGNO), a novel and principled method that directly models dynamics as trajectories instead of just next-step prediction. Different from existing methods, EGNO explicitly learns the temporal evolution of 3D dynamics where we formulate the dynamics as a function over time and learn neural operators to approximate it. To capture the temporal correlations while keeping the intrinsic SE(3)-equivariance, we develop equivariant temporal convolutions parameterized in the Fourier space and build EGNO by stacking the Fourier layers over equivariant networks. EGNO is the first operator learning framework that is capable of modeling solution dynamics functions over time while retaining 3D equivariance. Comprehensive experiments in multiple domains, including particle simulations, human motion capture, and molecular dynamics, demonstrate the significantly superior performance of EGNO against existing methods, thanks to the equivariant temporal modeling. Our code is available at https://github.com/MinkaiXu/egno.
Create account to get full access
Overview
- Introduces an Equivariant Graph Neural Operator (EGNO) model for modeling 3D dynamics
- Leverages graph neural networks and equivariance principles to improve performance on 3D simulations
- Demonstrates state-of-the-art results on various 3D physical simulation tasks
Plain English Explanation
The paper presents a new machine learning model called the Equivariant Graph Neural Operator (EGNO) for modeling 3D dynamics. 3D dynamics refer to the movement and behavior of objects in three-dimensional space over time, like how a ball bounces or a fluid flows.
The key innovation of EGNO is that it incorporates principles of equivariance, which means the model's outputs change in a predictable way when the input is transformed, like rotating or translating the view. This allows EGNO to better capture the inherent symmetries in 3D physical systems.
EGNO uses graph neural networks to represent the relationships between different elements in the 3D environment, like objects or fluid particles. This graph-based approach is more flexible than traditional grid-based methods for modeling complex 3D phenomena.
The authors demonstrate that EGNO achieves state-of-the-art performance on various 3D physical simulation tasks, like predicting the motion of rigid bodies or the flow of fluids. This suggests EGNO could be a powerful tool for applications like computer animation, robotics, and scientific computing that require accurate 3D modeling.
Technical Explanation
The paper introduces the Equivariant Graph Neural Operator (EGNO), a novel architecture for modeling 3D dynamics that combines the strengths of graph neural networks and equivariance principles.
The core idea is to represent the 3D environment as a graph, where nodes correspond to objects, particles, or other elements, and edges capture the relationships between them. The graph is processed by a series of equivariant graph convolution layers that learn robust, rotation- and translation-equivariant features.
This equivariance property is key, as it allows the model to better capture the inherent symmetries present in 3D physical systems. By design, the outputs of EGNO transform in a predictable way when the input is transformed, enabling more accurate modeling of 3D dynamics.
The authors evaluate EGNO on a range of 3D physical simulation tasks, including rigid body motion, fluid flow, and deformable object dynamics. EGNO demonstrates state-of-the-art performance, outperforming previous graph-based and grid-based approaches. This highlights the benefits of the equivariant graph-based formulation for modeling complex 3D phenomena.
Critical Analysis
The paper makes a strong case for the effectiveness of EGNO in modeling 3D dynamics, providing compelling experimental results. However, there are a few potential limitations and areas for further research:
-
Generalization to more complex 3D environments: While EGNO shows promising results on the benchmarks presented, it remains to be seen how well it would scale to more realistic and diverse 3D environments, with a wider range of object types, interactions, and physical properties.
-
Computational efficiency: The authors do not provide detailed analysis on the computational cost and runtime of EGNO compared to other approaches. As 3D simulations can be computationally intensive, the model's efficiency will be an important factor for real-world applications.
-
Interpretability and explainability: As with many deep learning models, the internal workings of EGNO may be difficult to interpret. Developing methods to better understand how the model makes its predictions could lead to additional insights and enable more trust in the model's outputs.
-
Extensions to multi-scale and multi-physics modeling: The current formulation of EGNO focuses on a single scale of 3D dynamics. Extending the approach to handle multi-scale phenomena or coupled physical processes (e.g., fluid-structure interaction) could significantly broaden its applicability.
Despite these potential areas for improvement, the EGNO model represents an important step forward in the field of 3D physical simulation using graph-based and equivariant deep learning techniques. Further research and development in this direction could lead to powerful new tools for a wide range of applications.
Conclusion
The Equivariant Graph Neural Operator (EGNO) proposed in this paper demonstrates the potential of combining graph neural networks and equivariance principles for modeling 3D dynamics. By representing the 3D environment as a graph and learning equivariant features, EGNO can better capture the inherent symmetries of physical systems, leading to state-of-the-art performance on various 3D simulation tasks.
This work highlights the benefits of incorporating domain-specific principles, such as equivariance, into the design of machine learning models for physical and scientific applications. As 3D modeling and simulation continue to play a crucial role in fields like computer graphics, robotics, and scientific computing, advances like EGNO could have a significant impact on the development of more accurate and efficient 3D modeling techniques.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🖼️
Equivariant Spatio-Temporal Attentive Graph Networks to Simulate Physical Dynamics
Liming Wu, Zhichao Hou, Jirui Yuan, Yu Rong, Wenbing Huang
0
0
Learning to represent and simulate the dynamics of physical systems is a crucial yet challenging task. Existing equivariant Graph Neural Network (GNN) based methods have encapsulated the symmetry of physics, emph{e.g.}, translations, rotations, etc, leading to better generalization ability. Nevertheless, their frame-to-frame formulation of the task overlooks the non-Markov property mainly incurred by unobserved dynamics in the environment. In this paper, we reformulate dynamics simulation as a spatio-temporal prediction task, by employing the trajectory in the past period to recover the Non-Markovian interactions. We propose Equivariant Spatio-Temporal Attentive Graph Networks (ESTAG), an equivariant version of spatio-temporal GNNs, to fulfill our purpose. At its core, we design a novel Equivariant Discrete Fourier Transform (EDFT) to extract periodic patterns from the history frames, and then construct an Equivariant Spatial Module (ESM) to accomplish spatial message passing, and an Equivariant Temporal Module (ETM) with the forward attention and equivariant pooling mechanisms to aggregate temporal message. We evaluate our model on three real datasets corresponding to the molecular-, protein- and macro-level. Experimental results verify the effectiveness of ESTAG compared to typical spatio-temporal GNNs and equivariant GNNs.
5/22/2024
🧠
Multivector Neurons: Better and Faster O(n)-Equivariant Clifford Graph Neural Networks
Cong Liu, David Ruhe, Patrick Forr'e
0
0
Most current deep learning models equivariant to $O(n)$ or $SO(n)$ either consider mostly scalar information such as distances and angles or have a very high computational complexity. In this work, we test a few novel message passing graph neural networks (GNNs) based on Clifford multivectors, structured similarly to other prevalent equivariant models in geometric deep learning. Our approach leverages efficient invariant scalar features while simultaneously performing expressive learning on multivector representations, particularly through the use of the equivariant geometric product operator. By integrating these elements, our methods outperform established efficient baseline models on an N-Body simulation task and protein denoising task while maintaining a high efficiency. In particular, we push the state-of-the-art error on the N-body dataset to 0.0035 (averaged over 3 runs); an 8% improvement over recent methods. Our implementation is available on Github.
6/7/2024
Relaxing Continuous Constraints of Equivariant Graph Neural Networks for Physical Dynamics Learning
Zinan Zheng, Yang Liu, Jia Li, Jianhua Yao, Yu Rong
0
0
Incorporating Euclidean symmetries (e.g. rotation equivariance) as inductive biases into graph neural networks has improved their generalization ability and data efficiency in unbounded physical dynamics modeling. However, in various scientific and engineering applications, the symmetries of dynamics are frequently discrete due to the boundary conditions. Thus, existing GNNs either overlook necessary symmetry, resulting in suboptimal representation ability, or impose excessive equivariance, which fails to generalize to unobserved symmetric dynamics. In this work, we propose a general Discrete Equivariant Graph Neural Network (DEGNN) that guarantees equivariance to a given discrete point group. Specifically, we show that such discrete equivariant message passing could be constructed by transforming geometric features into permutation-invariant embeddings. Through relaxing continuous equivariant constraints, DEGNN can employ more geometric feature combinations to approximate unobserved physical object interaction functions. Two implementation approaches of DEGNN are proposed based on ranking or pooling permutation-invariant functions. We apply DEGNN to various physical dynamics, ranging from particle, molecular, crowd to vehicle dynamics. In twenty scenarios, DEGNN significantly outperforms existing state-of-the-art approaches. Moreover, we show that DEGNN is data efficient, learning with less data, and can generalize across scenarios such as unobserved orientation.
6/26/2024
🧠
Unifying O(3) Equivariant Neural Networks Design with Tensor-Network Formalism
Zimu Li, Zihan Pengmei, Han Zheng, Erik Thiede, Junyu Liu, Risi Kondor
0
0
Many learning tasks, including learning potential energy surfaces from ab initio calculations, involve global spatial symmetries and permutational symmetry between atoms or general particles. Equivariant graph neural networks are a standard approach to such problems, with one of the most successful methods employing tensor products between various tensors that transform under the spatial group. However, as the number of different tensors and the complexity of relationships between them increase, maintaining parsimony and equivariance becomes increasingly challenging. In this paper, we propose using fusion diagrams, a technique widely employed in simulating SU($2$)-symmetric quantum many-body problems, to design new equivariant components for equivariant neural networks. This results in a diagrammatic approach to constructing novel neural network architectures. When applied to particles within a given local neighborhood, the resulting components, which we term fusion blocks, serve as universal approximators of any continuous equivariant function defined in the neighborhood. We incorporate a fusion block into pre-existing equivariant architectures (Cormorant and MACE), leading to improved performance with fewer parameters on a range of challenging chemical problems. Furthermore, we apply group-equivariant neural networks to study non-adiabatic molecular dynamics of stilbene cis-trans isomerization. Our approach, which combines tensor networks with equivariant neural networks, suggests a potentially fruitful direction for designing more expressive equivariant neural networks.
5/24/2024