Evaluating saliency scores in point clouds of natural environments by learning surface anomalies

0
Sign in to get full access
Overview
- The paper evaluates saliency scores in point clouds of natural environments by learning surface anomalies.
- The goal is to identify salient regions in 3D point cloud data that correspond to anomalies or interesting features on the surface of natural environments.
- The authors propose a method for learning surface anomaly features and using them to compute saliency scores for each point in the point cloud.
Plain English Explanation
The paper focuses on analyzing 3D point cloud data, which is a common way to represent 3D environments and objects. Point clouds are collections of individual data points, each with 3D coordinates, that together form a 3D shape or surface.
The researchers wanted to find the most interesting or salient regions within these point clouds, which could correspond to unusual or anomalous features on the surface of the environment. For example, in a point cloud of a forest, the salient regions might highlight things like fallen trees, large rocks, or unusual vegetation.
To do this, the researchers developed a method that learns to identify surface anomalies - areas that are different or stand out from the surrounding surface. The key idea is that these anomalies are likely to be the most interesting or salient parts of the 3D environment.
The method works by training a machine learning model to recognize patterns in the 3D point cloud data that indicate surface anomalies. It then uses this trained model to compute a "saliency score" for each point in the point cloud, indicating how anomalous or interesting that point is compared to its neighbors.
By identifying the most salient regions in the point cloud, this approach could be useful for applications like 3D scene understanding, autonomous navigation, and even identifying important features in natural environments for ecological or scientific purposes.
Technical Explanation
The paper presents a method for evaluating saliency scores in 3D point cloud data of natural environments by learning to identify surface anomalies. The key steps are:
-
Surface Anomaly Learning: The authors train a neural network model to learn features that indicate surface anomalies in the 3D point cloud data. This involves using a convolutional neural network architecture to capture local geometric patterns.
-
Saliency Computation: Once the anomaly detection model is trained, the authors use it to compute a saliency score for each point in the point cloud. The saliency score reflects how anomalous or salient that point is compared to its neighbors.
-
Evaluation: The authors evaluate their saliency scoring approach on several natural environment point cloud datasets. They compare the saliency scores to ground truth annotations of salient regions, showing that their method can effectively identify interesting and anomalous surface features.
The key innovation is the use of surface anomaly learning to drive the saliency computation. By training the model to recognize geometric patterns that indicate unusual surface features, the authors are able to compute meaningful saliency scores that align well with human perceptions of what is interesting or noteworthy in the 3D environment.
Critical Analysis
The paper presents a novel and promising approach for identifying salient regions in 3D point cloud data, with potential applications in areas like scene understanding and autonomous navigation. However, some potential limitations and areas for further research are:
-
The evaluation is primarily focused on outdoor natural environments. It's unclear how well the approach would generalize to other types of 3D scenes, such as urban environments or indoor spaces.
-
The paper does not explore the impact of point cloud density or noise on the saliency scoring performance. Real-world point cloud data can be sparse and noisy, which could present challenges.
-
While the surface anomaly learning approach is innovative, it relies on having good quality ground truth annotations for training. Obtaining such annotations can be time-intensive and expensive, especially for large-scale 3D datasets.
-
The paper does not delve into potential applications or use cases for the saliency scoring beyond the evaluation metrics. Further research could explore how this technique could benefit real-world 3D perception tasks.
Overall, the work represents an interesting step forward in 3D point cloud analysis, but there are opportunities to expand the scope and robustness of the approach through additional research and experimentation.
Conclusion
This paper presents a method for evaluating saliency scores in 3D point cloud data of natural environments by learning to identify surface anomalies. The key innovation is the use of a machine learning approach to capture geometric patterns indicative of unusual or interesting surface features, which are then used to compute saliency scores for each point in the cloud.
The authors demonstrate that this saliency scoring approach aligns well with human perceptions of salient regions in the 3D environment. While the current evaluation is focused on outdoor natural scenes, the underlying principles could potentially be extended to other types of 3D data and applications, such as autonomous navigation, scene understanding, and ecological monitoring.
Further research could explore the robustness of the method to real-world point cloud challenges, as well as expand the scope of application domains. Overall, this work represents an intriguing step forward in the analysis and understanding of 3D point cloud data.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Evaluating saliency scores in point clouds of natural environments by learning surface anomalies
Reuma Arav, Dennis Wittich, Franz Rottensteiner
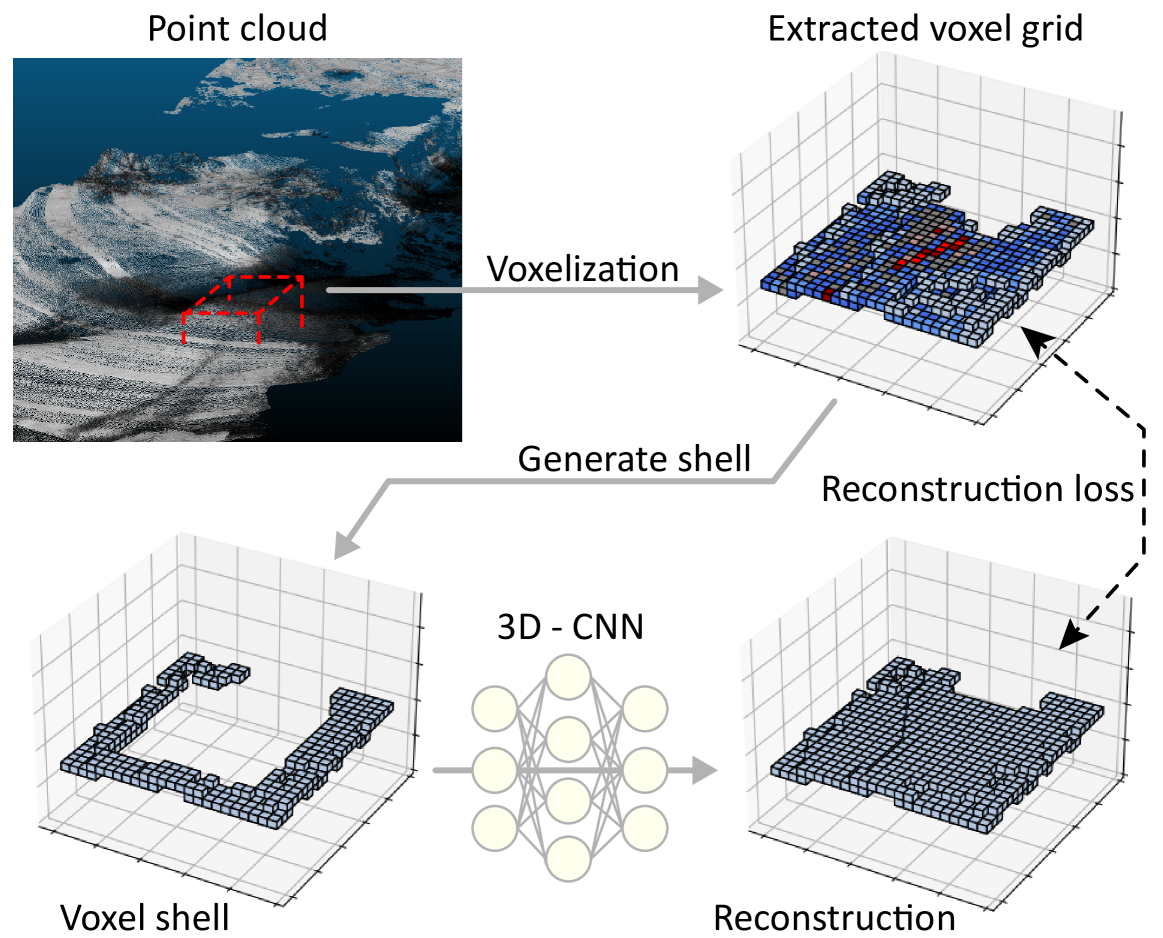
In recent years, three-dimensional point clouds are used increasingly to document natural environments. Each dataset contains a diverse set of objects, at varying shapes and sizes, distributed throughout the data and intricately intertwined with the topography. Therefore, regions of interest are difficult to find and consequent analyses become a challenge. Inspired from visual perception principles, we propose to differentiate objects of interest from the cluttered environment by evaluating how much they stand out from their surroundings, i.e., their geometric salience. Previous saliency detection approaches suggested mostly handcrafted attributes for the task. However, such methods fail when the data are too noisy or have high levels of texture. Here we propose a learning-based mechanism that accommodates noise and textured surfaces. We assume that within the natural environment any change from the prevalent surface would suggest a salient object. Thus, we first learn the underlying surface and then search for anomalies within it. Initially, a deep neural network is trained to reconstruct the surface. Regions where the reconstructed part deviates significantly from the original point cloud yield a substantial reconstruction error, signifying an anomaly, i.e., saliency. We demonstrate the effectiveness of the proposed approach by searching for salient features in various natural scenarios, which were acquired by different acquisition platforms. We show the strong correlation between the reconstruction error and salient objects.
Read more8/27/2024
↗️
0
A Survey and Benchmark of Automatic Surface Reconstruction from Point Clouds
Raphael Sulzer, Renaud Marlet, Bruno Vallet, Loic Landrieu
We present a comprehensive survey and benchmark of both traditional and learning-based methods for surface reconstruction from point clouds. This task is particularly challenging for real-world acquisitions due to factors like noise, outliers, non-uniform sampling, and missing data. Traditional approaches often simplify the problem by imposing handcrafted priors on either the input point clouds or the resulting surface, a process that can necessitate tedious hyperparameter tuning. Conversely, deep learning models have the capability to directly learn the properties of input point clouds and desired surfaces from data. We study the influence of these handcrafted and learned priors on the precision and robustness of surface reconstruction techniques. We evaluate various time-tested and contemporary methods in a standardized manner. When both trained and evaluated on point clouds with identical characteristics, the learning-based models consistently produce superior surfaces compared to their traditional counterparts$unicode{x2013}$even in scenarios involving novel shape categories. However, traditional methods demonstrate greater resilience to the diverse array of point cloud anomalies commonly found in real-world 3D acquisitions. For the benefit of the research community, we make our code and datasets available, inviting further enhancements to learning-based surface reconstruction. This can be accessed at https://github.com/raphaelsulzer/dsr-benchmark .
Read more4/17/2024
🔄
0
Attention-Guided Lidar Segmentation and Odometry Using Image-to-Point Cloud Saliency Transfer
Guanqun Ding, Nevrez Imamoglu, Ali Caglayan, Masahiro Murakawa, Ryosuke Nakamura
LiDAR odometry estimation and 3D semantic segmentation are crucial for autonomous driving, which has achieved remarkable advances recently. However, these tasks are challenging due to the imbalance of points in different semantic categories for 3D semantic segmentation and the influence of dynamic objects for LiDAR odometry estimation, which increases the importance of using representative/salient landmarks as reference points for robust feature learning. To address these challenges, we propose a saliency-guided approach that leverages attention information to improve the performance of LiDAR odometry estimation and semantic segmentation models. Unlike in the image domain, only a few studies have addressed point cloud saliency information due to the lack of annotated training data. To alleviate this, we first present a universal framework to transfer saliency distribution knowledge from color images to point clouds, and use this to construct a pseudo-saliency dataset (i.e. FordSaliency) for point clouds. Then, we adopt point cloud-based backbones to learn saliency distribution from pseudo-saliency labels, which is followed by our proposed SalLiDAR module. SalLiDAR is a saliency-guided 3D semantic segmentation model that integrates saliency information to improve segmentation performance. Finally, we introduce SalLONet, a self-supervised saliency-guided LiDAR odometry network that uses the semantic and saliency predictions of SalLiDAR to achieve better odometry estimation. Our extensive experiments on benchmark datasets demonstrate that the proposed SalLiDAR and SalLONet models achieve state-of-the-art performance against existing methods, highlighting the effectiveness of image-to-LiDAR saliency knowledge transfer. Source code will be available at https://github.com/nevrez/SalLONet.
Read more6/18/2024

0
3D-CSAD: Untrained 3D Anomaly Detection for Complex Manufacturing Surfaces
Xuanming Cao, Chengyu Tao, Juan Du
The surface quality inspection of manufacturing parts based on 3D point cloud data has attracted increasing attention in recent years. The reason is that the 3D point cloud can capture the entire surface of manufacturing parts, unlike the previous practices that focus on some key product characteristics. However, achieving accurate 3D anomaly detection is challenging, due to the complex surfaces of manufacturing parts and the difficulty of collecting sufficient anomaly samples. To address these challenges, we propose a novel untrained anomaly detection method based on 3D point cloud data for complex manufacturing parts, which can achieve accurate anomaly detection in a single sample without training data. In the proposed framework, we transform an input sample into two sets of profiles along different directions. Based on one set of the profiles, a novel segmentation module is devised to segment the complex surface into multiple basic and simple components. In each component, another set of profiles, which have the nature of similar shapes, can be modeled as a low-rank matrix. Thus, accurate 3D anomaly detection can be achieved by using Robust Principal Component Analysis (RPCA) on these low-rank matrices. Extensive numerical experiments on different types of parts show that our method achieves promising results compared with the benchmark methods.
Read more4/12/2024