Event3DGS: Event-based 3D Gaussian Splatting for Fast Egomotion
2406.02972
0
0

Abstract
By combining differentiable rendering with explicit point-based scene representations, 3D Gaussian Splatting (3DGS) has demonstrated breakthrough 3D reconstruction capabilities. However, to date 3DGS has had limited impact on robotics, where high-speed egomotion is pervasive: Egomotion introduces motion blur and leads to artifacts in existing frame-based 3DGS reconstruction methods. To address this challenge, we introduce Event3DGS, an {em event-based} 3DGS framework. By exploiting the exceptional temporal resolution of event cameras, Event3GDS can reconstruct high-fidelity 3D structure and appearance under high-speed egomotion. Extensive experiments on multiple synthetic and real-world datasets demonstrate the superiority of Event3DGS compared with existing event-based dense 3D scene reconstruction frameworks; Event3DGS substantially improves reconstruction quality (+3dB) while reducing computational costs by 95%. Our framework also allows one to incorporate a few motion-blurred frame-based measurements into the reconstruction process to further improve appearance fidelity without loss of structural accuracy.
Create account to get full access
Overview
- The paper presents a novel event-based 3D Gaussian splatting method called Event3DGS for fast egomotion estimation.
- Event-based cameras capture changes in pixel intensity rather than full frames, providing high temporal resolution and low latency.
- Event3DGS uses the event stream to update a 3D Gaussian representation of the scene, enabling fast and robust egomotion estimation.
Plain English Explanation
Event-based cameras are a new type of camera that work differently from traditional cameras. Instead of capturing full images at a fixed rate, they only register changes in brightness at each pixel. This allows them to have very high temporal resolution and low latency, making them useful for applications like robotics and augmented reality.
The Event3DGS method presented in this paper takes advantage of the event stream from an event-based camera to estimate the camera's motion, or egomotion, in a fast and robust way. It does this by using the events to update a 3D Gaussian representation of the scene. This 3D Gaussian model can then be used to quickly calculate how the camera has moved between frames.
The key benefit of this approach is that it can estimate camera motion much more efficiently than methods that rely on processing full image frames. This makes it well-suited for applications that require low-latency motion estimation, like robotics and augmented reality.
Technical Explanation
The Event3DGS method represents the 3D scene using a sparse set of 3D Gaussian distributions. Each event in the event stream is used to update the parameters of the closest Gaussian, effectively "splatting" the event onto the 3D model.
As the camera moves, the Gaussian distributions are transformed according to the estimated egomotion. This allows the 3D model to be efficiently updated and used to estimate the camera's motion. The authors demonstrate that Event3DGS can achieve accurate egomotion estimation at high frame rates, outperforming previous event-based approaches like EvGGS and recent advances in 3D Gaussian splatting.
The 3D Gaussian splatting technique used in Event3DGS is related to prior work on 3D geometry-aware deformable Gaussian splatting for dynamic scenes, but is adapted to the event-based setting.
Critical Analysis
The paper provides a thorough evaluation of the Event3DGS method, demonstrating its benefits in terms of accuracy and efficiency compared to previous approaches. However, the authors do acknowledge some limitations, such as the need for careful parameter tuning and the potential for drift over long trajectories.
Additionally, the paper does not delve into the potential challenges of deploying event-based cameras in real-world scenarios, such as handling high-dynamic-range scenes or dealing with sensor noise. Further research may be needed to address these practical concerns.
Overall, the Event3DGS method represents a promising step forward in event-based 3D perception and motion estimation, with potential applications in areas like robotics and augmented reality. However, as with any new technology, there is still room for improvement and further investigation.
Conclusion
The Event3DGS method presented in this paper offers a novel approach to event-based 3D perception and egomotion estimation. By representing the scene as a sparse set of 3D Gaussians and using the event stream to efficiently update this model, the method can achieve accurate motion estimation at high frame rates.
This work contributes to the growing body of research on event-based vision and 3D Gaussian splatting, and could have significant implications for applications that require low-latency, high-speed motion tracking, such as robotics and augmented reality. As event-based cameras continue to mature and find wider adoption, methods like Event3DGS will play an important role in unlocking their full potential.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
E2GS: Event Enhanced Gaussian Splatting
Hiroyuki Deguchi, Mana Masuda, Takuya Nakabayashi, Hideo Saito
0
0
Event cameras, known for their high dynamic range, absence of motion blur, and low energy usage, have recently found a wide range of applications thanks to these attributes. In the past few years, the field of event-based 3D reconstruction saw remarkable progress, with the Neural Radiance Field (NeRF) based approach demonstrating photorealistic view synthesis results. However, the volume rendering paradigm of NeRF necessitates extensive training and rendering times. In this paper, we introduce Event Enhanced Gaussian Splatting (E2GS), a novel method that incorporates event data into Gaussian Splatting, which has recently made significant advances in the field of novel view synthesis. Our E2GS effectively utilizes both blurry images and event data, significantly improving image deblurring and producing high-quality novel view synthesis. Our comprehensive experiments on both synthetic and real-world datasets demonstrate our E2GS can generate visually appealing renderings while offering faster training and rendering speed (140 FPS). Our code is available at https://github.com/deguchihiroyuki/E2GS.
6/24/2024

EvaGaussians: Event Stream Assisted Gaussian Splatting from Blurry Images
Wangbo Yu, Chaoran Feng, Jiye Tang, Xu Jia, Li Yuan, Yonghong Tian
0
0
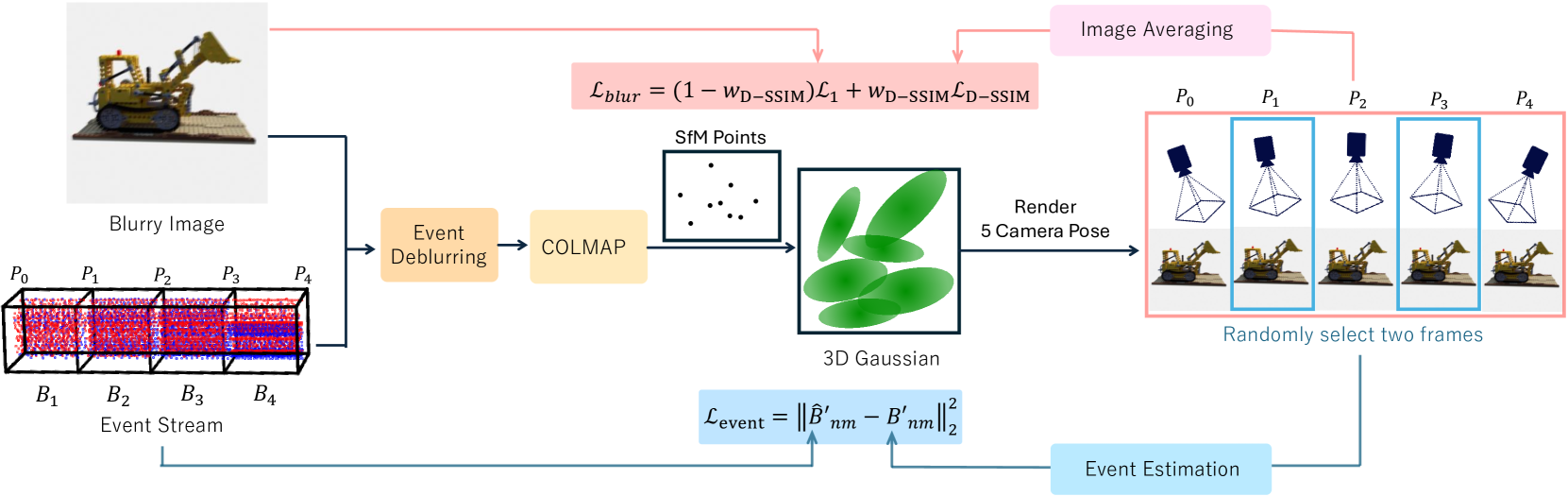
3D Gaussian Splatting (3D-GS) has demonstrated exceptional capabilities in 3D scene reconstruction and novel view synthesis. However, its training heavily depends on high-quality, sharp images and accurate camera poses. Fulfilling these requirements can be challenging in non-ideal real-world scenarios, where motion-blurred images are commonly encountered in high-speed moving cameras or low-light environments that require long exposure times. To address these challenges, we introduce Event Stream Assisted Gaussian Splatting (EvaGaussians), a novel approach that integrates event streams captured by an event camera to assist in reconstructing high-quality 3D-GS from blurry images. Capitalizing on the high temporal resolution and dynamic range offered by the event camera, we leverage the event streams to explicitly model the formation process of motion-blurred images and guide the deblurring reconstruction of 3D-GS. By jointly optimizing the 3D-GS parameters and recovering camera motion trajectories during the exposure time, our method can robustly facilitate the acquisition of high-fidelity novel views with intricate texture details. We comprehensively evaluated our method and compared it with previous state-of-the-art deblurring rendering methods. Both qualitative and quantitative comparisons demonstrate that our method surpasses existing techniques in restoring fine details from blurry images and producing high-fidelity novel views.
5/31/2024

EvGGS: A Collaborative Learning Framework for Event-based Generalizable Gaussian Splatting
Jiaxu Wang, Junhao He, Ziyi Zhang, Mingyuan Sun, Jingkai Sun, Renjing Xu
0
0
Event cameras offer promising advantages such as high dynamic range and low latency, making them well-suited for challenging lighting conditions and fast-moving scenarios. However, reconstructing 3D scenes from raw event streams is difficult because event data is sparse and does not carry absolute color information. To release its potential in 3D reconstruction, we propose the first event-based generalizable 3D reconstruction framework, called EvGGS, which reconstructs scenes as 3D Gaussians from only event input in a feedforward manner and can generalize to unseen cases without any retraining. This framework includes a depth estimation module, an intensity reconstruction module, and a Gaussian regression module. These submodules connect in a cascading manner, and we collaboratively train them with a designed joint loss to make them mutually promote. To facilitate related studies, we build a novel event-based 3D dataset with various material objects and calibrated labels of grayscale images, depth maps, camera poses, and silhouettes. Experiments show models that have jointly trained significantly outperform those trained individually. Our approach performs better than all baselines in reconstruction quality, and depth/intensity predictions with satisfactory rendering speed.
6/4/2024
Recent Advances in 3D Gaussian Splatting
Tong Wu, Yu-Jie Yuan, Ling-Xiao Zhang, Jie Yang, Yan-Pei Cao, Ling-Qi Yan, Lin Gao
0
0
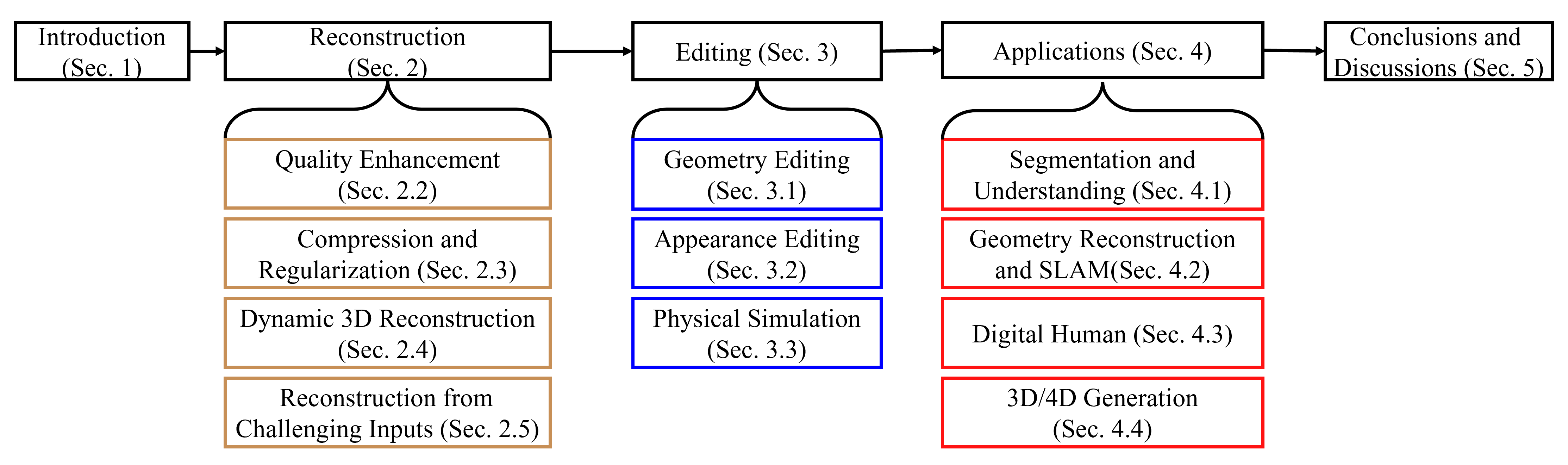
The emergence of 3D Gaussian Splatting (3DGS) has greatly accelerated the rendering speed of novel view synthesis. Unlike neural implicit representations like Neural Radiance Fields (NeRF) that represent a 3D scene with position and viewpoint-conditioned neural networks, 3D Gaussian Splatting utilizes a set of Gaussian ellipsoids to model the scene so that efficient rendering can be accomplished by rasterizing Gaussian ellipsoids into images. Apart from the fast rendering speed, the explicit representation of 3D Gaussian Splatting facilitates editing tasks like dynamic reconstruction, geometry editing, and physical simulation. Considering the rapid change and growing number of works in this field, we present a literature review of recent 3D Gaussian Splatting methods, which can be roughly classified into 3D reconstruction, 3D editing, and other downstream applications by functionality. Traditional point-based rendering methods and the rendering formulation of 3D Gaussian Splatting are also illustrated for a better understanding of this technique. This survey aims to help beginners get into this field quickly and provide experienced researchers with a comprehensive overview, which can stimulate the future development of the 3D Gaussian Splatting representation.
4/16/2024