E2GS: Event Enhanced Gaussian Splatting

0
Sign in to get full access
Overview
• The paper introduces a new technique called Event Enhanced Gaussian Splatting (E2GS) for 3D scene reconstruction using event cameras. • Event cameras are sensors that detect changes in pixel brightness over time, unlike traditional cameras that capture full frames. • E2GS leverages the advantages of event data, such as low latency and high dynamic range, to create high-quality 3D reconstructions from sparse event streams.
Plain English Explanation
Event cameras are a new type of visual sensor that work differently from regular cameras. While regular cameras capture full images at fixed intervals, event cameras only detect changes in brightness at each pixel. This allows them to have very low latency and a high dynamic range, making them useful for applications like robotics and augmented reality.
The E2GS technique described in this paper takes advantage of the unique properties of event data to create 3D reconstructions of a scene. Instead of using traditional camera frames, E2GS builds a 3D model by "splatting" Gaussian distributions onto a surface based on the sparse event data. This results in high-quality 3D reconstructions even when the input event stream is quite sparse.
The key innovation is how E2GS integrates information from the event camera over time to gradually refine the 3D model. By considering the timing and spatial patterns of the event data, the system can infer the structure of the scene more effectively than previous event-based 3D reconstruction methods like EvAGaussians and EvGGS.
The authors demonstrate the capabilities of E2GS through experiments on both synthetic and real-world datasets, showing that it can outperform existing event-based 3D reconstruction techniques, especially in challenging scenarios with rapid camera motion or low-texture scenes. This could make event cameras more practical for applications that require low-latency, high-fidelity 3D perception, like SPIKENVS and SparseGS.
Technical Explanation
The E2GS technique builds upon previous work on event-based 3D reconstruction, such as EvAGaussians and EvGGS. The key innovation is how E2GS integrates event data over time to gradually refine a 3D reconstruction.
The system first associates each incoming event with a 3D Gaussian distribution that represents the likely position of the surface that caused the event. These Gaussians are then "splatted" onto a 3D voxel grid, accumulating evidence for the underlying scene structure. By considering the temporal and spatial patterns of the events, E2GS can infer the 3D geometry more effectively than prior methods.
The authors evaluate E2GS on both synthetic and real-world datasets, showing that it outperforms existing event-based 3D reconstruction techniques, especially in challenging scenarios with rapid camera motion or low-texture scenes. This could make event cameras more practical for applications that require low-latency, high-fidelity 3D perception, like SPIKENVS and SparseGS.
Critical Analysis
The paper presents a promising approach to 3D reconstruction using event cameras, but there are a few potential limitations and areas for further research:
-
Sensitivity to Noise: Event cameras can be susceptible to noise, and the performance of E2GS may degrade in the presence of high noise levels. The authors could explore ways to make the system more robust to noisy event data.
-
Lack of Temporal Consistency: While E2GS integrates event data over time, the 3D reconstruction may still lack temporal consistency, leading to jittery or unstable results. Incorporating techniques to enforce temporal smoothness could be an area for future work.
-
Scalability to Large-scale Scenes: The experiments in the paper focus on smaller, indoor scenes. It's unclear how well E2GS would scale to larger, outdoor environments with more complex geometry and dynamics. Evaluating the system on a wider range of scenes would be valuable.
-
Comparison to Hybrid Approaches: The paper compares E2GS to other event-based 3D reconstruction methods, but it could be interesting to see how it performs against hybrid approaches that combine event data with traditional camera frames or other sensors.
Overall, the E2GS technique represents an important step forward in leveraging the unique properties of event cameras for 3D perception. With further refinement and exploration of the limitations, it could become a valuable tool for robotics, augmented reality, and other applications that require low-latency, high-fidelity 3D reconstruction.
Conclusion
The E2GS paper introduces a novel approach for 3D scene reconstruction using event cameras. By integrating event data over time and considering the temporal and spatial patterns of the events, E2GS can create high-quality 3D models from sparse input data. This represents an important advancement in leveraging the unique properties of event cameras, which could lead to new applications in robotics, augmented reality, and other fields that require low-latency, high-fidelity 3D perception.
While the paper demonstrates promising results, there are some potential limitations and areas for further research, such as improving robustness to noise, ensuring temporal consistency, and evaluating scalability to larger scenes. Continued exploration and refinement of the E2GS technique could help unlock the full potential of event-based 3D reconstruction and bring us closer to realizing the benefits of these innovative visual sensors.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
E2GS: Event Enhanced Gaussian Splatting
Hiroyuki Deguchi, Mana Masuda, Takuya Nakabayashi, Hideo Saito
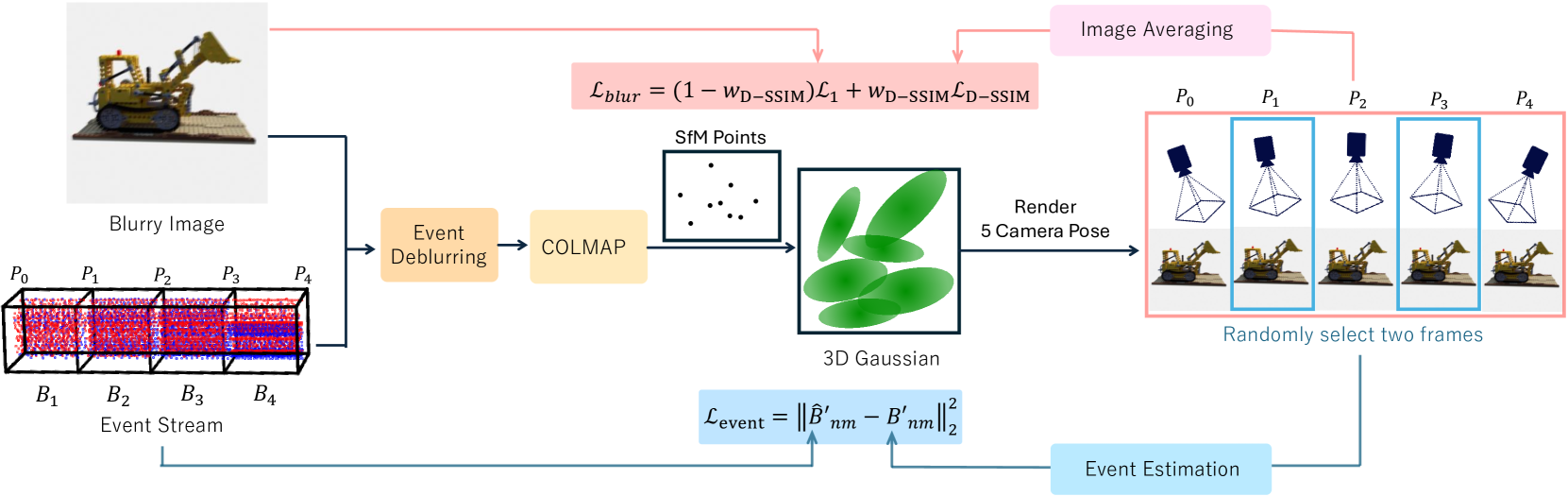
Event cameras, known for their high dynamic range, absence of motion blur, and low energy usage, have recently found a wide range of applications thanks to these attributes. In the past few years, the field of event-based 3D reconstruction saw remarkable progress, with the Neural Radiance Field (NeRF) based approach demonstrating photorealistic view synthesis results. However, the volume rendering paradigm of NeRF necessitates extensive training and rendering times. In this paper, we introduce Event Enhanced Gaussian Splatting (E2GS), a novel method that incorporates event data into Gaussian Splatting, which has recently made significant advances in the field of novel view synthesis. Our E2GS effectively utilizes both blurry images and event data, significantly improving image deblurring and producing high-quality novel view synthesis. Our comprehensive experiments on both synthetic and real-world datasets demonstrate our E2GS can generate visually appealing renderings while offering faster training and rendering speed (140 FPS). Our code is available at https://github.com/deguchihiroyuki/E2GS.
Read more6/24/2024

0
Ev-GS: Event-based Gaussian splatting for Efficient and Accurate Radiance Field Rendering
Jingqian Wu, Shuo Zhu, Chutian Wang, Edmund Y. Lam
Computational neuromorphic imaging (CNI) with event cameras offers advantages such as minimal motion blur and enhanced dynamic range, compared to conventional frame-based methods. Existing event-based radiance field rendering methods are built on neural radiance field, which is computationally heavy and slow in reconstruction speed. Motivated by the two aspects, we introduce Ev-GS, the first CNI-informed scheme to infer 3D Gaussian splatting from a monocular event camera, enabling efficient novel view synthesis. Leveraging 3D Gaussians with pure event-based supervision, Ev-GS overcomes challenges such as the detection of fast-moving objects and insufficient lighting. Experimental results show that Ev-GS outperforms the method that takes frame-based signals as input by rendering realistic views with reduced blurring and improved visual quality. Moreover, it demonstrates competitive reconstruction quality and reduced computing occupancy compared to existing methods, which paves the way to a highly efficient CNI approach for signal processing.
Read more7/17/2024

0
Event3DGS: Event-based 3D Gaussian Splatting for Fast Egomotion
Tianyi Xiong, Jiayi Wu, Botao He, Cornelia Fermuller, Yiannis Aloimonos, Heng Huang, Christopher A. Metzler
By combining differentiable rendering with explicit point-based scene representations, 3D Gaussian Splatting (3DGS) has demonstrated breakthrough 3D reconstruction capabilities. However, to date 3DGS has had limited impact on robotics, where high-speed egomotion is pervasive: Egomotion introduces motion blur and leads to artifacts in existing frame-based 3DGS reconstruction methods. To address this challenge, we introduce Event3DGS, an {em event-based} 3DGS framework. By exploiting the exceptional temporal resolution of event cameras, Event3GDS can reconstruct high-fidelity 3D structure and appearance under high-speed egomotion. Extensive experiments on multiple synthetic and real-world datasets demonstrate the superiority of Event3DGS compared with existing event-based dense 3D scene reconstruction frameworks; Event3DGS substantially improves reconstruction quality (+3dB) while reducing computational costs by 95%. Our framework also allows one to incorporate a few motion-blurred frame-based measurements into the reconstruction process to further improve appearance fidelity without loss of structural accuracy.
Read more6/19/2024

0
EaDeblur-GS: Event assisted 3D Deblur Reconstruction with Gaussian Splatting
Yuchen Weng, Zhengwen Shen, Ruofan Chen, Qi Wang, Jun Wang
3D deblurring reconstruction techniques have recently seen significant advancements with the development of Neural Radiance Fields (NeRF) and 3D Gaussian Splatting (3DGS). Although these techniques can recover relatively clear 3D reconstructions from blurry image inputs, they still face limitations in handling severe blurring and complex camera motion. To address these issues, we propose Event-assisted 3D Deblur Reconstruction with Gaussian Splatting (EaDeblur-GS), which integrates event camera data to enhance the robustness of 3DGS against motion blur. By employing an Adaptive Deviation Estimator (ADE) network to estimate Gaussian center deviations and using novel loss functions, EaDeblur-GS achieves sharp 3D reconstructions in real-time, demonstrating performance comparable to state-of-the-art methods.
Read more9/6/2024