FeatureSORT: Essential Features for Effective Tracking

0
Sign in to get full access
Overview
- FeatureSORT is a visual tracking algorithm that identifies essential features for effective tracking.
- It builds on the DeepSORT algorithm, improving tracking performance by selecting the most relevant features.
- The paper presents the FeatureSORT approach and evaluates its performance on standard benchmarks.
Plain English Explanation
The FeatureSORT algorithm is designed to improve the effectiveness of visual object tracking. Visual tracking is the process of following the movement of objects in a video feed, and it has many important applications, such as surveillance, autonomous vehicles, and robotics.
FeatureSORT builds on an existing algorithm called DeepSORT, which uses deep learning to track objects. However, DeepSORT uses all available visual features, which can sometimes include irrelevant or noisy information that can degrade tracking performance.
The key innovation in FeatureSORT is that it selects the most essential features for tracking, rather than using all available features. This helps the algorithm focus on the most important information and improve its ability to accurately track objects as they move through a scene.
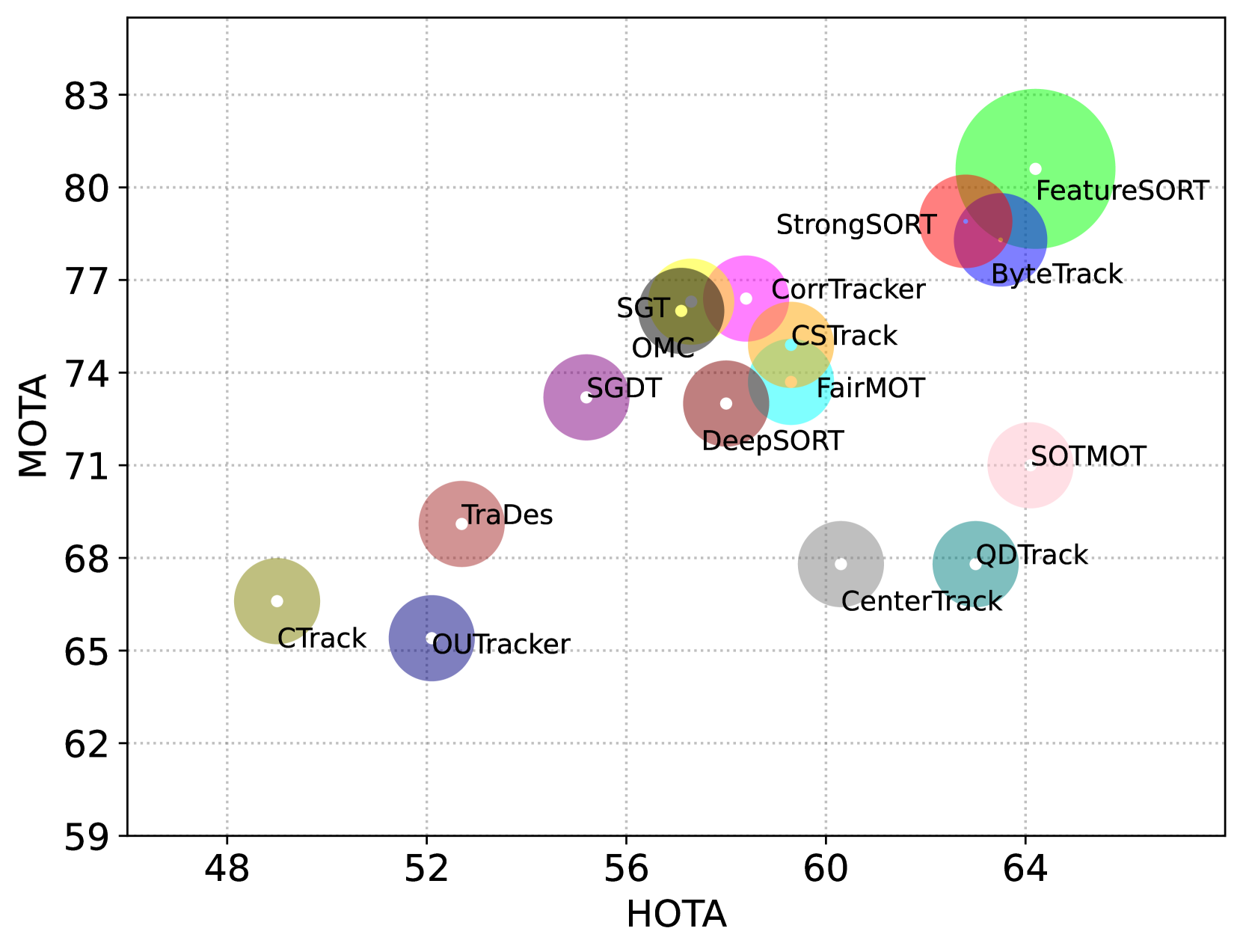
The researchers evaluated FeatureSORT on standard benchmarks and found that it outperformed DeepSORT and other state-of-the-art tracking algorithms. This suggests that carefully selecting the right visual features is an important factor in building effective tracking systems.
Technical Explanation
The FeatureSORT algorithm builds on the DeepSORT framework, which uses a deep neural network to extract visual features from video frames and then associates those features with detected object bounding boxes to perform tracking.
The key innovation in FeatureSORT is the feature selection module, which identifies the most relevant visual features for tracking. This is accomplished through a two-stage process:
-
Feature Importance Estimation: The algorithm first evaluates the importance of each visual feature by measuring its contribution to the overall tracking performance. This is done by temporarily removing each feature and evaluating the impact on tracking accuracy.
-
Feature Selection: Based on the importance scores, FeatureSORT selects the top-k most essential features to use for tracking. This helps the system focus on the most relevant information and avoid being distracted by irrelevant or noisy features.
The FeatureSORT tracker then uses the selected features to associate detections across frames and maintain consistent object identities over time, just like the original DeepSORT algorithm.
The researchers evaluated FeatureSORT on several standard benchmarks, including the MOT17 and DanceTrack datasets. Their results showed that FeatureSORT outperformed the original DeepSORT and other state-of-the-art tracking algorithms, demonstrating the benefits of carefully selecting the most essential visual features for effective object tracking.
Critical Analysis
The FeatureSORT paper presents a compelling approach for improving the performance of visual tracking systems by focusing on the most relevant visual features. The feature selection mechanism is a clever way to identify the most important information for tracking, and the evaluation on standard benchmarks suggests that this strategy is effective.
However, the paper does not provide much detail on the specific visual features used or how the feature importance estimation is implemented. It would be helpful to have a better understanding of the types of features that are most valuable for tracking and how the algorithm determines their relative importance.
Additionally, the paper does not discuss any potential limitations or drawbacks of the FeatureSORT approach. For example, it's unclear how the feature selection process might perform in scenarios with rapidly changing or highly dynamic visual environments, or how the algorithm would handle occlusions or other challenging tracking scenarios.
Further research could explore the robustness of the FeatureSORT approach, investigate how the feature selection mechanism could be improved or extended, and examine its performance on a wider range of tracking tasks and datasets.
Conclusion
The FeatureSORT algorithm represents an important advance in visual tracking by demonstrating the value of carefully selecting the most essential visual features for effective object tracking. By building on the DeepSORT framework and adding a feature selection mechanism, FeatureSORT is able to outperform state-of-the-art tracking algorithms on standard benchmarks.
This research suggests that the choice of visual features is a critical component of building robust and accurate tracking systems, and that further innovations in this area could lead to significant improvements in a wide range of applications that rely on visual tracking, such as autonomous vehicles, video surveillance, and human-robot interaction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
FeatureSORT: Essential Features for Effective Tracking
Hamidreza Hashempoor, Rosemary Koikara, Yu Dong Hwang
In this work, we introduce a novel tracker designed for online multiple object tracking with a focus on being simple, while being effective. we provide multiple feature modules each of which stands for a particular appearance information. By integrating distinct appearance features, including clothing color, style, and target direction, alongside a ReID network for robust embedding extraction, our tracker significantly enhances online tracking accuracy. Additionally, we propose the incorporation of a stronger detector and also provide an advanced post processing methods that further elevate the tracker's performance. During real time operation, we establish measurement to track associated distance function which includes the IoU, direction, color, style, and ReID features similarity information, where each metric is calculated separately. With the design of our feature related distance function, it is possible to track objects through longer period of occlusions, while keeping the number of identity switches comparatively low. Extensive experimental evaluation demonstrates notable improvement in tracking accuracy and reliability, as evidenced by reduced identity switches and enhanced occlusion handling. These advancements not only contribute to the state of the art in object tracking but also open new avenues for future research and practical applications demanding high precision and reliability.
Read more7/8/2024

0
When to Extract ReID Features: A Selective Approach for Improved Multiple Object Tracking
Emirhan Bayar, Cemal Aker
Extracting and matching Re-Identification (ReID) features is used by many state-of-the-art (SOTA) Multiple Object Tracking (MOT) methods, particularly effective against frequent and long-term occlusions. While end-to-end object detection and tracking have been the main focus of recent research, they have yet to outperform traditional methods in benchmarks like MOT17 and MOT20. Thus, from an application standpoint, methods with separate detection and embedding remain the best option for accuracy, modularity, and ease of implementation, though they are impractical for edge devices due to the overhead involved. In this paper, we investigate a selective approach to minimize the overhead of feature extraction while preserving accuracy, modularity, and ease of implementation. This approach can be integrated into various SOTA methods. We demonstrate its effectiveness by applying it to StrongSORT and Deep OC-SORT. Experiments on MOT17, MOT20, and DanceTrack datasets show that our mechanism retains the advantages of feature extraction during occlusions while significantly reducing runtime. Additionally, it improves accuracy by preventing confusion in the feature-matching stage, particularly in cases of deformation and appearance similarity, which are common in DanceTrack. https://github.com/emirhanbayar/Fast-StrongSORT, https://github.com/emirhanbayar/Fast-Deep-OC-SORT
Read more9/11/2024

0
LITE: A Paradigm Shift in Multi-Object Tracking with Efficient ReID Feature Integration
Jumabek Alikhanov, Dilshod Obidov, Hakil Kim
The Lightweight Integrated Tracking-Feature Extraction (LITE) paradigm is introduced as a novel multi-object tracking (MOT) approach. It enhances ReID-based trackers by eliminating inference, pre-processing, post-processing, and ReID model training costs. LITE uses real-time appearance features without compromising speed. By integrating appearance feature extraction directly into the tracking pipeline using standard CNN-based detectors such as YOLOv8m, LITE demonstrates significant performance improvements. The simplest implementation of LITE on top of classic DeepSORT achieves a HOTA score of 43.03% at 28.3 FPS on the MOT17 benchmark, making it twice as fast as DeepSORT on MOT17 and four times faster on the more crowded MOT20 dataset, while maintaining similar accuracy. Additionally, a new evaluation framework for tracking-by-detection approaches reveals that conventional trackers like DeepSORT remain competitive with modern state-of-the-art trackers when evaluated under fair conditions. The code will be available post-publication at https://github.com/Jumabek/LITE.
Read more9/9/2024

0
Temporal Correlation Meets Embedding: Towards a 2nd Generation of JDE-based Real-Time Multi-Object Tracking
Yunfei Zhang, Chao Liang, Jin Gao, Zhipeng Zhang, Weiming Hu, Stephen Maybank, Xue Zhou, Liang Li
Joint Detection and Embedding (JDE) trackers have demonstrated excellent performance in Multi-Object Tracking (MOT) tasks by incorporating the extraction of appearance features as auxiliary tasks through embedding Re-Identification task (ReID) into the detector, achieving a balance between inference speed and tracking performance. However, solving the competition between the detector and the feature extractor has always been a challenge. Meanwhile, the issue of directly embedding the ReID task into MOT has remained unresolved. The lack of high discriminability in appearance features results in their limited utility. In this paper, a new learning approach using cross-correlation to capture temporal information of objects is proposed. The feature extraction network is no longer trained solely on appearance features from each frame but learns richer motion features by utilizing feature heatmaps from consecutive frames, which addresses the challenge of inter-class feature similarity. Furthermore, our learning approach is applied to a more lightweight feature extraction network, and treat the feature matching scores as strong cues rather than auxiliary cues, with an appropriate weight calculation to reflect the compatibility between our obtained features and the MOT task. Our tracker, named TCBTrack, achieves state-of-the-art performance on multiple public benchmarks, i.e., MOT17, MOT20, and DanceTrack datasets. Specifically, on the DanceTrack test set, we achieve 56.8 HOTA, 58.1 IDF1 and 92.5 MOTA, making it the best online tracker capable of achieving real-time performance. Comparative evaluations with other trackers prove that our tracker achieves the best balance between speed, robustness and accuracy. Code is available at https://github.com/yfzhang1214/TCBTrack.
Read more8/7/2024