On-the-fly Point Feature Representation for Point Clouds Analysis

0

Sign in to get full access
Overview
- Provides a new approach for representing point features in point cloud analysis tasks
- Learns point features on-the-fly during model inference, rather than requiring pre-computed features
- Demonstrated improvements in classification and semantic segmentation tasks compared to existing methods
Plain English Explanation
Point clouds are 3D representations of physical objects or environments, consisting of a collection of individual data points. Analyzing and understanding point clouds is crucial for various applications, such as scene understanding, autonomous driving, and robotics.
The paper introduces a novel technique called "On-the-fly Point Feature Representation" that learns point features during the model's inference process, rather than relying on pre-computed features. This approach aims to capture the local geometry and contextual information of each point in the point cloud more effectively.
By learning features on-the-fly, the model can adapt to the specific characteristics of the input point cloud, potentially leading to improved performance in tasks like classification and semantic segmentation. This is in contrast to traditional methods that use pre-computed features, which may not be as well-suited to the specific task or data at hand.
The paper demonstrates the effectiveness of this approach through experiments on standard point cloud benchmarks, showing improvements over existing state-of-the-art methods. This suggests that the on-the-fly feature representation can be a valuable tool for researchers and practitioners working with point cloud analysis.
Technical Explanation
The paper proposes an "On-the-fly Point Feature Representation" (OPFR) method for point cloud analysis. The key idea is to learn point features during the model's inference process, rather than relying on pre-computed features.
The OPFR approach consists of two main components:
-
Local Geometry Encoder: This module takes the local neighborhood of a point and encodes it into a feature representation. The local geometry is captured by considering the relative positions and features of neighboring points.
-
Context Aggregator: This module aggregates the local features of a point with its global context, capturing both local and global information. This is achieved through a multi-scale attention mechanism that combines features from different receptive field sizes.
The OPFR module is then integrated into existing point cloud analysis architectures, such as those used for classification and semantic segmentation tasks. During inference, the OPFR module dynamically computes point features based on the input point cloud, rather than using pre-computed features.
The paper evaluates the OPFR approach on several standard point cloud benchmarks, including ModelNet40, ScanNet, and S3DIS. The results demonstrate that the OPFR method outperforms state-of-the-art techniques that rely on pre-computed features, highlighting the benefits of the on-the-fly feature representation.
Critical Analysis
The paper presents a novel and promising approach for point cloud analysis, but it is important to consider some potential caveats and areas for further research:
-
Computational Efficiency: The on-the-fly feature computation may introduce additional computational overhead during inference, which could be a concern for real-time applications. The authors discuss this trade-off but do not provide a comprehensive analysis of the computational costs.
-
Robustness to Noise and Irregularities: The paper does not explicitly address the model's robustness to common issues in point cloud data, such as noise, occlusions, and irregularities in point density. Further research may be needed to understand how the OPFR method performs in the presence of these challenges.
-
Generalization Capabilities: While the paper demonstrates the effectiveness of the OPFR approach on the evaluated benchmarks, it is essential to investigate its generalization capabilities to a wider range of point cloud datasets and tasks.
-
Interpretability and Explainability: The paper does not provide insights into the internal workings of the OPFR module and how it learns the point features. Exploring the interpretability and explainability of this approach could lead to a better understanding of its strengths and limitations.
Despite these potential areas for improvement, the paper presents a valuable contribution to the field of point cloud analysis by introducing a novel and effective technique for learning point features on-the-fly.
Conclusion
The "On-the-fly Point Feature Representation" (OPFR) method proposed in this paper offers a new approach for point cloud analysis tasks, such as classification and semantic segmentation. By learning point features dynamically during the inference process, the OPFR method can better capture the local geometry and contextual information of the input point cloud, leading to improved performance compared to existing techniques that rely on pre-computed features.
The paper's experimental results on standard benchmarks demonstrate the effectiveness of the OPFR approach, suggesting it could be a valuable tool for researchers and practitioners working with point cloud data. However, further research is needed to address potential limitations, such as computational efficiency, robustness to data challenges, and the interpretability of the learned features.
Overall, this paper represents an important step forward in the field of point cloud analysis, and the OPFR method could inspire new directions for developing more adaptive and effective point cloud representation learning techniques.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
On-the-fly Point Feature Representation for Point Clouds Analysis
Jiangyi Wang, Zhongyao Cheng, Na Zhao, Jun Cheng, Xulei Yang
Point cloud analysis is challenging due to its unique characteristics of unorderness, sparsity and irregularity. Prior works attempt to capture local relationships by convolution operations or attention mechanisms, exploiting geometric information from coordinates implicitly. These methods, however, are insufficient to describe the explicit local geometry, e.g., curvature and orientation. In this paper, we propose On-the-fly Point Feature Representation (OPFR), which captures abundant geometric information explicitly through Curve Feature Generator module. This is inspired by Point Feature Histogram (PFH) from computer vision community. However, the utilization of vanilla PFH encounters great difficulties when applied to large datasets and dense point clouds, as it demands considerable time for feature generation. In contrast, we introduce the Local Reference Constructor module, which approximates the local coordinate systems based on triangle sets. Owing to this, our OPFR only requires extra 1.56ms for inference (65x faster than vanilla PFH) and 0.012M more parameters, and it can serve as a versatile plug-and-play module for various backbones, particularly MLP-based and Transformer-based backbones examined in this study. Additionally, we introduce the novel Hierarchical Sampling module aimed at enhancing the quality of triangle sets, thereby ensuring robustness of the obtained geometric features. Our proposed method improves overall accuracy (OA) on ModelNet40 from 90.7% to 94.5% (+3.8%) for classification, and OA on S3DIS Area-5 from 86.4% to 90.0% (+3.6%) for semantic segmentation, respectively, building upon PointNet++ backbone. When integrated with Point Transformer backbone, we achieve state-of-the-art results on both tasks: 94.8% OA on ModelNet40 and 91.7% OA on S3DIS Area-5.
Read more8/13/2024

0
PFGS: High Fidelity Point Cloud Rendering via Feature Splatting
Jiaxu Wang, Ziyi Zhang, Junhao He, Renjing Xu
Rendering high-fidelity images from sparse point clouds is still challenging. Existing learning-based approaches suffer from either hole artifacts, missing details, or expensive computations. In this paper, we propose a novel framework to render high-quality images from sparse points. This method first attempts to bridge the 3D Gaussian Splatting and point cloud rendering, which includes several cascaded modules. We first use a regressor to estimate Gaussian properties in a point-wise manner, the estimated properties are used to rasterize neural feature descriptors into 2D planes which are extracted from a multiscale extractor. The projected feature volume is gradually decoded toward the final prediction via a multiscale and progressive decoder. The whole pipeline experiences a two-stage training and is driven by our well-designed progressive and multiscale reconstruction loss. Experiments on different benchmarks show the superiority of our method in terms of rendering qualities and the necessities of our main components.
Read more7/8/2024
0
Node-Level Topological Representation Learning on Point Clouds
Vincent P. Grande, Michael T. Schaub
Topological Data Analysis (TDA) allows us to extract powerful topological and higher-order information on the global shape of a data set or point cloud. Tools like Persistent Homology or the Euler Transform give a single complex description of the global structure of the point cloud. However, common machine learning applications like classification require point-level information and features to be available. In this paper, we bridge this gap and propose a novel method to extract node-level topological features from complex point clouds using discrete variants of concepts from algebraic topology and differential geometry. We verify the effectiveness of these topological point features (TOPF) on both synthetic and real-world data and study their robustness under noise.
Read more6/5/2024
0
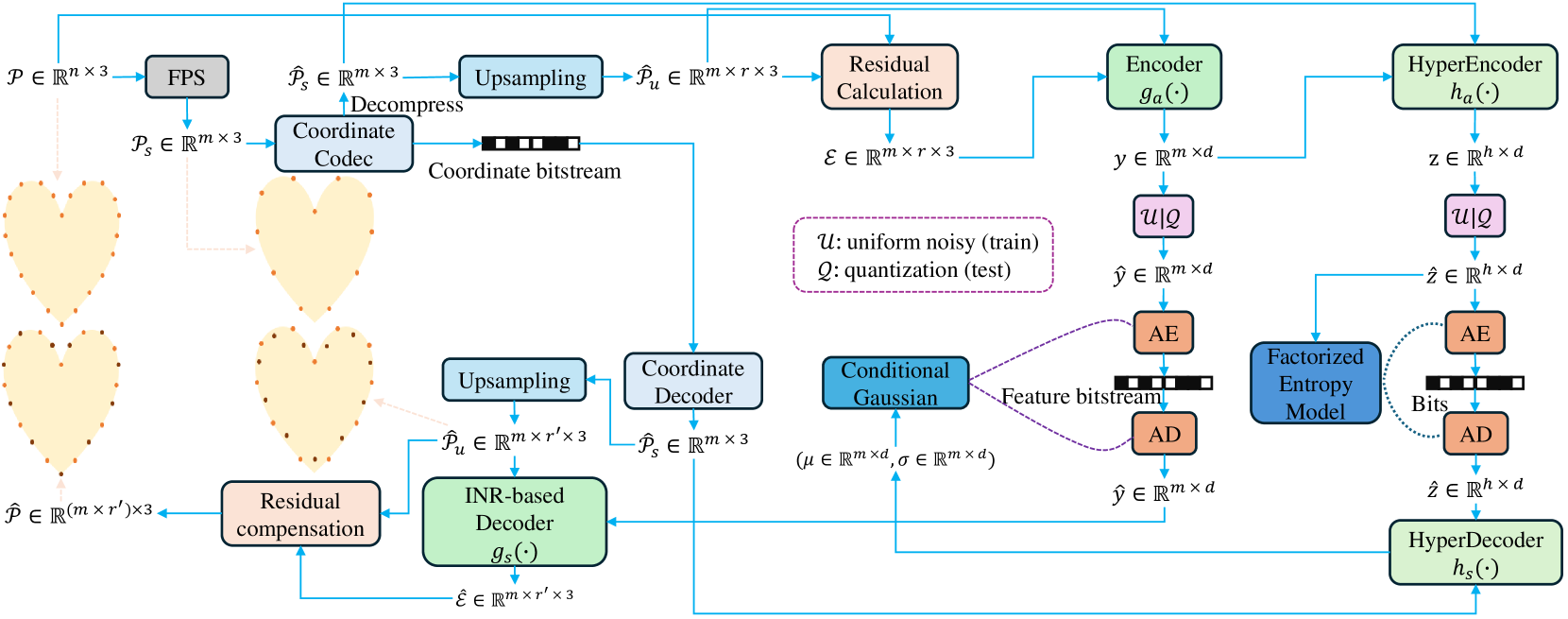
Fast Point Cloud Geometry Compression with Context-based Residual Coding and INR-based Refinement
Hao Xu, Xi Zhang, Xiaolin Wu
Compressing a set of unordered points is far more challenging than compressing images/videos of regular sample grids, because of the difficulties in characterizing neighboring relations in an irregular layout of points. Many researchers resort to voxelization to introduce regularity, but this approach suffers from quantization loss. In this research, we use the KNN method to determine the neighborhoods of raw surface points. This gives us a means to determine the spatial context in which the latent features of 3D points are compressed by arithmetic coding. As such, the conditional probability model is adaptive to local geometry, leading to significant rate reduction. Additionally, we propose a dual-layer architecture where a non-learning base layer reconstructs the main structures of the point cloud at low complexity, while a learned refinement layer focuses on preserving fine details. This design leads to reductions in model complexity and coding latency by two orders of magnitude compared to SOTA methods. Moreover, we incorporate an implicit neural representation (INR) into the refinement layer, allowing the decoder to sample points on the underlying surface at arbitrary densities. This work is the first to effectively exploit content-aware local contexts for compressing irregular raw point clouds, achieving high rate-distortion performance, low complexity, and the ability to function as an arbitrary-scale upsampling network simultaneously.
Read more8/7/2024