Formation Under Communication Constraints: Control Performance Meets Channel Capacity

0

Sign in to get full access
Overview
- Explores the challenges in formation control of multi-agent systems under communication constraints
- Investigates the tradeoffs between control performance and channel capacity
- Proposes a framework to optimize formation control while considering communication limitations
Plain English Explanation
This research paper tackles the problem of formation control in multi-agent systems, where a group of agents need to maintain a specific spatial arrangement or "formation" while navigating their environment. The key twist is that the agents must communicate with each other over wireless channels with limited capacity, which can impact their ability to coordinate and maintain the desired formation.
The researchers recognize that there is a fundamental tradeoff between control performance (how well the agents can maintain the formation) and the channel capacity (the rate at which the agents can exchange information). They propose a framework to shape the radio access in a way that optimizes this tradeoff, allowing the agents to maintain a high-quality formation despite the communication constraints.
The key idea is to dynamically adjust the communication strategy based on the agents' current positions and the desired formation, ensuring that the most critical information is transmitted efficiently. This could involve, for example, prioritizing the exchange of data between agents that are closer together and play a more important role in maintaining the formation.
By developing this safe and distributed control approach, the researchers hope to enable more robust and reliable formation control in real-world scenarios where communication bandwidth is limited, such as in disaster response or environmental monitoring applications.
Technical Explanation
The paper presents a framework for formation control of multi-agent systems under communication constraints. The authors formulate the problem as an optimization task, where the goal is to maximize the control performance while respecting the limits of the available communication channel capacity.
The proposed approach relies on a hierarchical control architecture, where high-level formation control commands are transmitted to the agents via a wireless communication network. The authors derive analytical expressions for the relationship between the formation control performance and the channel capacity, and use this to guide the optimization of the communication strategy.
The key technical contributions include:
- A mathematical model for the formation control problem that captures the trade-off between control performance and channel capacity.
- An optimization-based framework to dynamically adjust the communication strategy based on the agents' positions and the desired formation.
- Simulation and experimental results demonstrating the effectiveness of the proposed approach in maintaining high-quality formations under realistic communication constraints.
Critical Analysis
The paper presents a well-designed and thorough investigation of the formation control problem under communication constraints. The authors have identified a critical challenge in multi-agent systems and proposed a principled framework to address it.
One potential limitation of the work is that it assumes a centralized communication infrastructure, where a central controller coordinates the agents' actions and communication. In real-world scenarios, a fully distributed control approach may be more practical and robust to failures or disruptions in the communication network.
Additionally, the paper focuses on formation control, but the proposed framework could potentially be extended to other multi-agent coordination tasks, such as collaborative perception or information sharing. Exploring these broader applications could further showcase the versatility and impact of the research.
Overall, the paper makes a valuable contribution to the field of multi-agent systems and wireless communication, providing a solid foundation for future work in this important area.
Conclusion
This research paper presents a novel framework for formation control of multi-agent systems under communication constraints. By optimizing the tradeoff between control performance and channel capacity, the proposed approach enables high-quality formations to be maintained even when the agents' ability to exchange information is limited.
The key insights and contributions of this work could have significant implications for a wide range of real-world applications, from disaster response to environmental monitoring, where reliable multi-agent coordination is crucial but communication resources are often scarce. As the authors demonstrate, carefully designing the communication strategy can be a powerful tool for enhancing the capabilities of distributed robotic and autonomous systems.
Overall, this paper represents an important advancement in the field of multi-agent control and coordination, and its findings are likely to inspire further research and development in this rapidly evolving area of study.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Formation Under Communication Constraints: Control Performance Meets Channel Capacity
Yaru Chen, Yirui Cong, Xiangyun Zhou, Long Cheng, Xiangke Wang
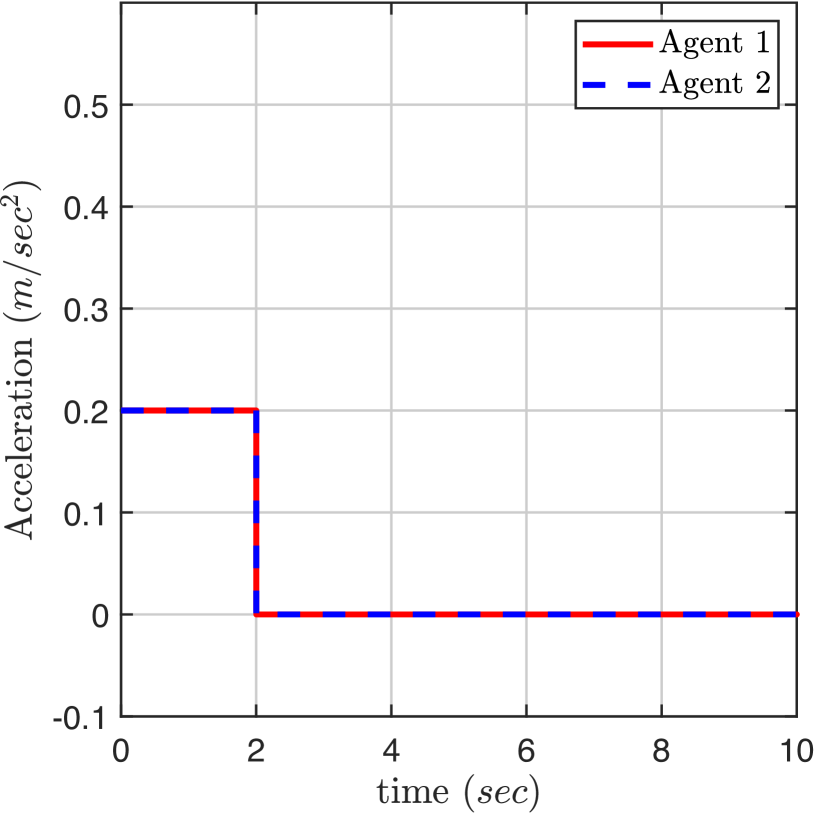
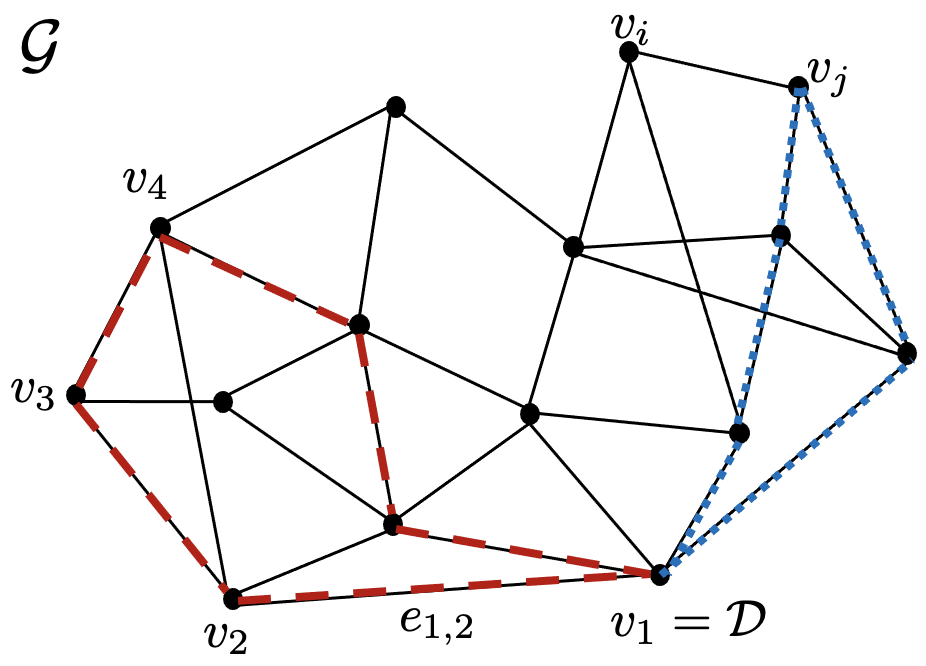
In wireless communication-based formation control systems, the control performance is significantly impacted by the channel capacity of each communication link between agents. This relationship, however, remains under-investigated in the existing studies. To address this gap, the formation control problem of classical second-order multi-agent systems with bounded process noises was considered taking into account the channel capacity. More specifically, the model of communication links between agents is first established, based on a new concept -- guaranteed communication region, which characterizes all possible locations for successful message decoding in the present of control-system uncertainty. Furthermore, we rigorously prove that, the guaranteed communication region does not unboundedly increase with the transmission time, which indicates an important trade-off between the guaranteed communication region and the data rate. The fundamental limits of data rate for any desired accuracy are also obtained. Finally, the integrated design to achieve the desired formation accuracy is proposed, where an estimation-based controller and transmit power control strategy are developed.
Read more6/28/2024
0
Safety-Critical Formation Control of Non-Holonomic Multi-Robot Systems in Communication-Limited Environments
Vishrut Bohara, Siavash Farzan
This paper presents a robust estimator-based safety-critical controller for formation control of non-holonomic mobile robots in communication-limited environments. The proposed decentralized framework integrates a robust state estimator with a formation tracking control law that guarantees inter-agent collision avoidance using control barrier functions. String stability is incorporated into the control design to maintain stability against noise from predecessors in leader-follower formations. Rigorous stability analysis using Lyapunov functions ensures the stability of estimation errors and the convergence of the formation to desired configurations. The effectiveness and robustness of the proposed approach are validated through numerical simulations of various maneuvers and realistic Gazebo experiments involving formations in a warehouse environment. The results demonstrate the controller's ability to maintain safety, achieve precise formation control, and mitigate disturbances in scenarios without inter-robot communication.
Read more6/21/2024

0
Communication and Control Co-Design in 6G: Sequential Decision-Making with LLMs
Xianfu Chen, Celimuge Wu, Yi Shen, Yusheng Ji, Tsutomu Yoshinaga, Qiang Ni, Charilaos C. Zarakovitis, Honggang Zhang
This article investigates a control system within the context of six-generation wireless networks. The control performance optimization confronts the technical challenges that arise from the intricate interactions between communication and control sub-systems, asking for a co-design. Accounting for the system dynamics, we formulate the sequential co-design decision-makings of communication and control over the discrete time horizon as a Markov decision process, for which a practical offline learning framework is proposed. Our proposed framework integrates large language models into the elements of reinforcement learning. We present a case study on the age of semantics-aware communication and control co-design to showcase the potentials from our proposed learning framework. Furthermore, we discuss the open issues remaining to make our proposed offline learning framework feasible for real-world implementations, and highlight the research directions for future explorations.
Read more9/10/2024
0
Learning Hierarchical Control For Multi-Agent Capacity-Constrained Systems
Charlott Vallon, Alessandro Pinto, Bartolomeo Stellato, Francesco Borrelli
This paper introduces a novel data-driven hierarchical control scheme for managing a fleet of nonlinear, capacity-constrained autonomous agents in an iterative environment. We propose a control framework consisting of a high-level dynamic task assignment and routing layer and low-level motion planning and tracking layer. Each layer of the control hierarchy uses a data-driven Model Predictive Control (MPC) policy, maintaining bounded computational complexity at each calculation of a new task assignment or actuation input. We utilize collected data to iteratively refine estimates of agent capacity usage, and update MPC policy parameters accordingly. Our approach leverages tools from iterative learning control to integrate learning at both levels of the hierarchy, and coordinates learning between levels in order to maintain closed-loop feasibility and performance improvement of the connected architecture.
Read more4/12/2024