From Imitation to Refinement -- Residual RL for Precise Visual Assembly

0

Sign in to get full access
Overview
- The paper presents a novel approach called "Residual Reinforcement Learning (Residual RL)" for precise visual assembly tasks.
- The method combines imitation learning and reinforcement learning, allowing it to learn complex robotic manipulation skills from demonstration and then refine them through trial-and-error.
- The authors demonstrate the effectiveness of their approach on a challenging visual assembly task, showing it outperforms previous techniques.
Plain English Explanation
The paper introduces a new way for robots to learn how to do complex assembly tasks by combining two different machine learning techniques: imitation learning and reinforcement learning.
Imitation learning allows the robot to learn from watching a human perform the task. The robot tries to mimic the human's actions. However, the robot's imitation may not be perfect, especially for very precise tasks.
Reinforcement learning allows the robot to learn by trial-and-error, experimenting with different actions and getting feedback on how well it's doing. This helps the robot refine and improve its skills over time.
The key innovation in this paper is using reinforcement learning to "refine" the robot's skills after it has learned the basic task through imitation. This "Residual RL" approach allows the robot to start with a good initial behavior from imitation, and then use reinforcement learning to make small adjustments and get even better at the task.
The authors test this approach on a challenging visual assembly task, where the robot has to precisely fit parts together. They show that Residual RL outperforms using either imitation learning or reinforcement learning alone. The robot is able to learn the task more quickly and perform it with higher precision.
Technical Explanation
The paper proposes a "Residual Reinforcement Learning" (Residual RL) approach for learning precise visual assembly skills. The key idea is to combine imitation learning and reinforcement learning, allowing the agent to first learn a good initial behavior from demonstration, and then refine that behavior through trial-and-error.
The system first uses behavioral cloning to learn an initial policy from expert demonstrations of the assembly task. It then uses Advantage Actor-Critic reinforcement learning to learn a "residual policy" that modifies the initial imitation-learned policy.
The residual policy takes the current state and the output of the imitation-learned policy as input, and learns to output a small adjustment to the original action. This allows the agent to fine-tune and improve the imitation-learned policy through exploration and feedback.
The authors evaluate their approach on a challenging visual assembly task, where the agent must precisely fit parts together. They show that Residual RL outperforms using either imitation learning or reinforcement learning alone, achieving higher success rates and precision. The imitation learning provides a strong initial behavior, while the residual reinforcement learning allows the agent to refine and improve upon that behavior.
Critical Analysis
The paper presents a compelling approach that effectively combines the strengths of imitation learning and reinforcement learning. By using reinforcement learning to refine an initial imitation-learned policy, the Residual RL method is able to achieve better performance than either technique on its own.
One potential limitation is that the method assumes the availability of expert demonstrations to bootstrap the learning process. In real-world settings, obtaining high-quality demonstrations may be challenging. Additional research could explore ways to relax this requirement, such as through semi-supervised learning or data-efficient imitation learning.
Another area for further investigation is the generalization of the Residual RL approach to more complex, multi-step assembly tasks. The current evaluation is limited to a single-step fitting task. Extending the method to handle longer sequences of actions and more varied assembly scenarios would be an important next step.
Additionally, the paper does not explore the interpretability or explainability of the learned policies. Understanding how the combined imitation and reinforcement learning approach arrive at their decisions could be valuable for building trust and transparency in robotic systems.
Overall, the Residual RL method presented in this paper represents a promising direction for advancing the state-of-the-art in robotic manipulation and assembly, and the authors have laid a solid foundation for future work in this area.
Conclusion
This paper introduces a novel "Residual Reinforcement Learning" approach that combines imitation learning and reinforcement learning to enable robots to learn precise visual assembly skills. By leveraging the strengths of both techniques, the method is able to outperform using either approach alone.
The authors demonstrate the effectiveness of their approach on a challenging single-step assembly task, showing it can achieve high success rates and precision. While the current evaluation is limited, the Residual RL concept represents an important step forward in developing more capable and adaptable robotic manipulation systems.
Future research could explore ways to relax the dependency on expert demonstrations, extend the approach to more complex multi-step tasks, and investigate the interpretability of the learned policies. Overall, this work contributes valuable insights and techniques to the ongoing effort to enable robots to perform sophisticated real-world assembly and manipulation tasks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
From Imitation to Refinement -- Residual RL for Precise Visual Assembly
Lars Ankile, Anthony Simeonov, Idan Shenfeld, Marcel Torne, Pulkit Agrawal
Behavior cloning (BC) currently stands as a dominant paradigm for learning real-world visual manipulation. However, in tasks that require locally corrective behaviors like multi-part assembly, learning robust policies purely from human demonstrations remains challenging. Reinforcement learning (RL) can mitigate these limitations by allowing policies to acquire locally corrective behaviors through task reward supervision and exploration. This paper explores the use of RL fine-tuning to improve upon BC-trained policies in precise manipulation tasks. We analyze and overcome technical challenges associated with using RL to directly train policy networks that incorporate modern architectural components like diffusion models and action chunking. We propose training residual policies on top of frozen BC-trained diffusion models using standard policy gradient methods and sparse rewards, an approach we call ResiP (Residual for Precise manipulation). Our experimental results demonstrate that this residual learning framework can significantly improve success rates beyond the base BC-trained models in high-precision assembly tasks by learning corrective actions. We also show that by combining ResiP with teacher-student distillation and visual domain randomization, our method can enable learning real-world policies for robotic assembly directly from RGB images. Find videos and code at url{https://residual-assembly.github.io}.
Read more7/24/2024

0
Cognitive Manipulation: Semi-supervised Visual Representation and Classroom-to-real Reinforcement Learning for Assembly in Semi-structured Environments
Chuang Wang, Lie Yang, Ze Lin, Yizhi Liao, Gang Chen, Longhan Xie
Assembling a slave object into a fixture-free master object represents a critical challenge in flexible manufacturing. Existing deep reinforcement learning-based methods, while benefiting from visual or operational priors, often struggle with small-batch precise assembly tasks due to their reliance on insufficient priors and high-costed model development. To address these limitations, this paper introduces a cognitive manipulation and learning approach that utilizes skill graphs to integrate learning-based object detection with fine manipulation models into a cohesive modular policy. This approach enables the detection of the master object from both global and local perspectives to accommodate positional uncertainties and variable backgrounds, and parametric residual policy to handle pose error and intricate contact dynamics effectively. Leveraging the skill graph, our method supports knowledge-informed learning of semi-supervised learning for object detection and classroom-to-real reinforcement learning for fine manipulation. Simulation experiments on a gear-assembly task have demonstrated that the skill-graph-enabled coarse-operation planning and visual attention are essential for efficient learning and robust manipulation, showing substantial improvements of 13$%$ in success rate and 15.4$%$ in number of completion steps over competing methods. Real-world experiments further validate that our system is highly effective for robotic assembly in semi-structured environments.
Read more6/4/2024
0
JUICER: Data-Efficient Imitation Learning for Robotic Assembly
Lars Ankile, Anthony Simeonov, Idan Shenfeld, Pulkit Agrawal
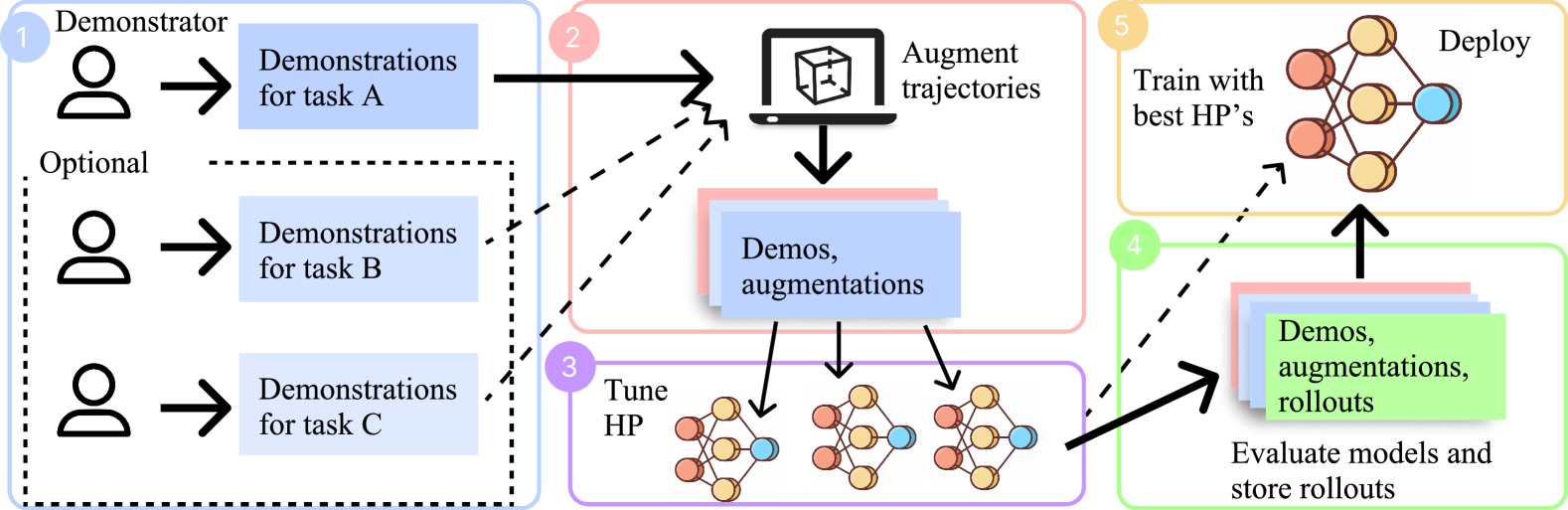
While learning from demonstrations is powerful for acquiring visuomotor policies, high-performance imitation without large demonstration datasets remains challenging for tasks requiring precise, long-horizon manipulation. This paper proposes a pipeline for improving imitation learning performance with a small human demonstration budget. We apply our approach to assembly tasks that require precisely grasping, reorienting, and inserting multiple parts over long horizons and multiple task phases. Our pipeline combines expressive policy architectures and various techniques for dataset expansion and simulation-based data augmentation. These help expand dataset support and supervise the model with locally corrective actions near bottleneck regions requiring high precision. We demonstrate our pipeline on four furniture assembly tasks in simulation, enabling a manipulator to assemble up to five parts over nearly 2500 time steps directly from RGB images, outperforming imitation and data augmentation baselines. Project website: https://imitation-juicer.github.io/.
Read more4/11/2024
🏅
0
Using Implicit Behavior Cloning and Dynamic Movement Primitive to Facilitate Reinforcement Learning for Robot Motion Planning
Zengjie Zhang, Jayden Hong, Amir Soufi Enayati, Homayoun Najjaran
Reinforcement learning (RL) for motion planning of multi-degree-of-freedom robots still suffers from low efficiency in terms of slow training speed and poor generalizability. In this paper, we propose a novel RL-based robot motion planning framework that uses implicit behavior cloning (IBC) and dynamic movement primitive (DMP) to improve the training speed and generalizability of an off-policy RL agent. IBC utilizes human demonstration data to leverage the training speed of RL, and DMP serves as a heuristic model that transfers motion planning into a simpler planning space. To support this, we also create a human demonstration dataset using a pick-and-place experiment that can be used for similar studies. Comparison studies in simulation reveal the advantage of the proposed method over the conventional RL agents with faster training speed and higher scores. A real-robot experiment indicates the applicability of the proposed method to a simple assembly task. Our work provides a novel perspective on using motion primitives and human demonstration to leverage the performance of RL for robot applications.
Read more8/20/2024