GaRField++: Reinforced Gaussian Radiance Fields for Large-Scale 3D Scene Reconstruction

0

Sign in to get full access
Overview
- GaRField++: Reinforced Gaussian Radiance Fields for Large-Scale 3D Scene Reconstruction
- Proposes a novel method for 3D scene reconstruction using a reinforced Gaussian radiance field representation
- Addresses challenges in large-scale 3D reconstruction, including handling occlusions, sparse observations, and efficient inference
Plain English Explanation
The paper introduces a new technique called GaRField++ for reconstructing detailed 3D models of large-scale scenes. The key idea is to represent the scene using a reinforced Gaussian radiance field, which is a more flexible and robust alternative to traditional radiance field representations.
The Gaussian radiance field can better handle occlusions, sparse observations, and efficiently perform inference, making it well-suited for large-scale 3D reconstruction. The "reinforced" part refers to additional components that improve the representation's ability to capture fine details and handle challenging scenes.
By using this reinforced Gaussian radiance field, the method can generate high-quality 3D models of complex environments, such as entire cities, from a collection of images or other sensor data. This has important applications in areas like urban planning, autonomous navigation, and virtual/augmented reality.
Technical Explanation
The paper proposes the GaRField++ method, which builds upon previous work on Gaussian radiance fields and radiance field-based 3D reconstruction.
The key components of GaRField++ include:
- A reinforced Gaussian radiance field representation that can better capture fine details and handle occlusions
- An efficient inference algorithm that can reconstruct large-scale 3D scenes from sparse observations
- Techniques for handling dynamic scenes and integrating additional sensor data (e.g., LiDAR) to improve reconstruction quality
The authors evaluate GaRField++ on several large-scale 3D reconstruction benchmarks, demonstrating its ability to outperform previous state-of-the-art methods in terms of reconstruction quality and runtime efficiency.
Critical Analysis
The paper provides a detailed technical description of the GaRField++ method and its components. The authors have clearly put significant effort into addressing the challenges of large-scale 3D reconstruction, such as occlusions and sparse observations.
One potential limitation of the approach is that it relies on a Gaussian radiance field representation, which may not be able to capture all the nuances of complex real-world scenes. The authors acknowledge this and discuss potential avenues for further research, such as exploring alternative field representations or incorporating more advanced neural network architectures.
Additionally, the paper could have provided more insight into the practical applications and potential impact of the GaRField++ method, beyond the technical details. Discussing how the method could benefit industries or enable new use cases would have strengthened the overall narrative and encouraged readers to think critically about the research's broader implications.
Conclusion
The GaRField++ method proposed in this paper represents a significant advancement in the field of large-scale 3D scene reconstruction. By using a reinforced Gaussian radiance field representation and efficient inference techniques, the authors have developed a system that can generate high-quality 3D models of complex environments from sparse sensor data.
The potential applications of this technology are wide-ranging, from urban planning and autonomous navigation to virtual and augmented reality. As the authors continue to refine and expand the capabilities of GaRField++, it could become an invaluable tool for researchers, engineers, and practitioners working in the field of 3D reconstruction and spatial understanding.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!GaRField++: Reinforced Gaussian Radiance Fields for Large-Scale 3D Scene Reconstruction
Hanyue Zhang, Zhiliu Yang, Xinhe Zuo, Yuxin Tong, Ying Long, Chen Liu
This paper proposes a novel framework for large-scale scene reconstruction based on 3D Gaussian splatting (3DGS) and aims to address the scalability and accuracy challenges faced by existing methods. For tackling the scalability issue, we split the large scene into multiple cells, and the candidate point-cloud and camera views of each cell are correlated through a visibility-based camera selection and a progressive point-cloud extension. To reinforce the rendering quality, three highlighted improvements are made in comparison with vanilla 3DGS, which are a strategy of the ray-Gaussian intersection and the novel Gaussians density control for learning efficiency, an appearance decoupling module based on ConvKAN network to solve uneven lighting conditions in large-scale scenes, and a refined final loss with the color loss, the depth distortion loss, and the normal consistency loss. Finally, the seamless stitching procedure is executed to merge the individual Gaussian radiance field for novel view synthesis across different cells. Evaluation of Mill19, Urban3D, and MatrixCity datasets shows that our method consistently generates more high-fidelity rendering results than state-of-the-art methods of large-scale scene reconstruction. We further validate the generalizability of the proposed approach by rendering on self-collected video clips recorded by a commercial drone.
Read more9/20/2024
0
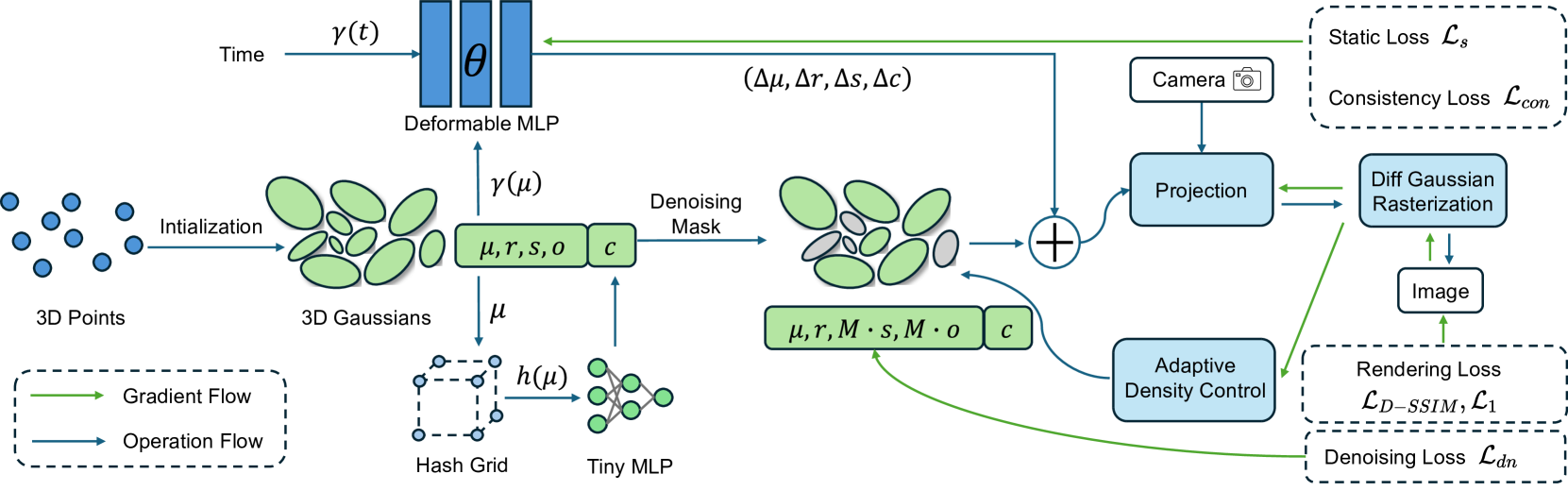
A Refined 3D Gaussian Representation for High-Quality Dynamic Scene Reconstruction
Bin Zhang, Bi Zeng, Zexin Peng
In recent years, Neural Radiance Fields (NeRF) has revolutionized three-dimensional (3D) reconstruction with its implicit representation. Building upon NeRF, 3D Gaussian Splatting (3D-GS) has departed from the implicit representation of neural networks and instead directly represents scenes as point clouds with Gaussian-shaped distributions. While this shift has notably elevated the rendering quality and speed of radiance fields but inevitably led to a significant increase in memory usage. Additionally, effectively rendering dynamic scenes in 3D-GS has emerged as a pressing challenge. To address these concerns, this paper purposes a refined 3D Gaussian representation for high-quality dynamic scene reconstruction. Firstly, we use a deformable multi-layer perceptron (MLP) network to capture the dynamic offset of Gaussian points and express the color features of points through hash encoding and a tiny MLP to reduce storage requirements. Subsequently, we introduce a learnable denoising mask coupled with denoising loss to eliminate noise points from the scene, thereby further compressing 3D Gaussian model. Finally, motion noise of points is mitigated through static constraints and motion consistency constraints. Experimental results demonstrate that our method surpasses existing approaches in rendering quality and speed, while significantly reducing the memory usage associated with 3D-GS, making it highly suitable for various tasks such as novel view synthesis, and dynamic mapping.
Read more5/29/2024

0
Taming 3DGS: High-Quality Radiance Fields with Limited Resources
Saswat Subhajyoti Mallick, Rahul Goel, Bernhard Kerbl, Francisco Vicente Carrasco, Markus Steinberger, Fernando De La Torre
3D Gaussian Splatting (3DGS) has transformed novel-view synthesis with its fast, interpretable, and high-fidelity rendering. However, its resource requirements limit its usability. Especially on constrained devices, training performance degrades quickly and often cannot complete due to excessive memory consumption of the model. The method converges with an indefinite number of Gaussians -- many of them redundant -- making rendering unnecessarily slow and preventing its usage in downstream tasks that expect fixed-size inputs. To address these issues, we tackle the challenges of training and rendering 3DGS models on a budget. We use a guided, purely constructive densification process that steers densification toward Gaussians that raise the reconstruction quality. Model size continuously increases in a controlled manner towards an exact budget, using score-based densification of Gaussians with training-time priors that measure their contribution. We further address training speed obstacles: following a careful analysis of 3DGS' original pipeline, we derive faster, numerically equivalent solutions for gradient computation and attribute updates, including an alternative parallelization for efficient backpropagation. We also propose quality-preserving approximations where suitable to reduce training time even further. Taken together, these enhancements yield a robust, scalable solution with reduced training times, lower compute and memory requirements, and high quality. Our evaluation shows that in a budgeted setting, we obtain competitive quality metrics with 3DGS while achieving a 4--5x reduction in both model size and training time. With more generous budgets, our measured quality surpasses theirs. These advances open the door for novel-view synthesis in constrained environments, e.g., mobile devices.
Read more6/26/2024

0
New!LI-GS: Gaussian Splatting with LiDAR Incorporated for Accurate Large-Scale Reconstruction
Changjian Jiang, Ruilan Gao, Kele Shao, Yue Wang, Rong Xiong, Yu Zhang
Large-scale 3D reconstruction is critical in the field of robotics, and the potential of 3D Gaussian Splatting (3DGS) for achieving accurate object-level reconstruction has been demonstrated. However, ensuring geometric accuracy in outdoor and unbounded scenes remains a significant challenge. This study introduces LI-GS, a reconstruction system that incorporates LiDAR and Gaussian Splatting to enhance geometric accuracy in large-scale scenes. 2D Gaussain surfels are employed as the map representation to enhance surface alignment. Additionally, a novel modeling method is proposed to convert LiDAR point clouds to plane-constrained multimodal Gaussian Mixture Models (GMMs). The GMMs are utilized during both initialization and optimization stages to ensure sufficient and continuous supervision over the entire scene while mitigating the risk of over-fitting. Furthermore, GMMs are employed in mesh extraction to eliminate artifacts and improve the overall geometric quality. Experiments demonstrate that our method outperforms state-of-the-art methods in large-scale 3D reconstruction, achieving higher accuracy compared to both LiDAR-based methods and Gaussian-based methods with improvements of 52.6% and 68.7%, respectively.
Read more9/20/2024