Gaussian Time Machine: A Real-Time Rendering Methodology for Time-Variant Appearances

0
📉
Sign in to get full access
Overview
- Recent advancements in neural rendering techniques have significantly improved the quality of 3D reconstruction.
- The emergence of 3D Gaussian Splatting (3DGS) has been a significant milestone, enabling efficient training and real-time rendering.
- Several studies have extended the real-time rendering capabilities of 3DGS to dynamic scenes, as seen in Spacetime Gaussian Feature Splatting.
- However, a challenge arises when training images are captured under vastly different weather and lighting conditions, which can be problematic for 3DGS and its variants.
- NeRF-based methods, like NeRF-W and CLNeRF, have shown promise in handling such challenging conditions, but their computational demands limit real-time rendering.
Plain English Explanation
The paper presents a new technique called the Gaussian Time Machine (GTM), which aims to address the challenges faced by 3DGS and its variants when dealing with 3D reconstruction under varying weather and lighting conditions. GTM models the time-dependent attributes of Gaussian primitives using discrete time embedding vectors decoded by a lightweight Multi-Layer-Perceptron (MLP). This allows GTM to adjust the opacity of Gaussian primitives, enabling it to reconstruct changes in object visibility over time. The paper also introduces a decomposed color model to improve the geometric consistency of the reconstructions.
Compared to NeRF-based methods, GTM achieves state-of-the-art rendering fidelity while being 100 times faster in rendering. Additionally, GTM successfully disentangles the appearance changes and renders smooth appearance interpolation, making it a promising solution for real-time 3D reconstruction in dynamic and challenging environments.
Technical Explanation
The key innovation in this paper is the Gaussian Time Machine (GTM), which extends the capabilities of 3D Gaussian Splatting (3DGS) to handle dynamic scenes with varying weather and lighting conditions.
GTM models the time-dependent attributes of Gaussian primitives using discrete time embedding vectors, which are decoded by a lightweight Multi-Layer-Perceptron (MLP). This allows GTM to adjust the opacity of Gaussian primitives, enabling it to reconstruct changes in object visibility over time. The paper also introduces a decomposed color model, where the color is represented as a combination of diffuse and specular components, to improve the geometric consistency of the reconstructions.
Compared to NeRF-based methods, such as NeRF-W and CLNeRF, GTM achieves state-of-the-art rendering fidelity while being 100 times faster in rendering. This is a significant advantage, as the computational demands of NeRF-based methods have hindered their real-time rendering capabilities.
Critical Analysis
The paper presents a promising solution for real-time 3D reconstruction in dynamic and challenging environments, but there are a few potential limitations and areas for further research:
-
The paper focuses on handling varying weather and lighting conditions, but it may not address other types of dynamic changes, such as object deformations or complex interactions between objects.
-
The decomposed color model introduced in the paper may not be sufficient to capture all the nuances of object appearance, and further refinements or alternative color representations could be explored.
-
The evaluation is primarily based on reconstruction fidelity and rendering speed, but the practical applicability of GTM in real-world scenarios, such as robotics or augmented reality, is not extensively discussed.
-
The paper does not provide a detailed analysis of the limitations or failure cases of GTM, which could help researchers and practitioners understand the boundaries of the technique and identify areas for improvement.
Overall, the Gaussian Time Machine represents an important step forward in addressing the challenges of 3D reconstruction in dynamic environments, but further research and development may be needed to fully realize its potential.
Conclusion
The Gaussian Time Machine (GTM) presented in this paper marks a significant advancement in neural rendering techniques for 3D reconstruction. By modeling the time-dependent attributes of Gaussian primitives and introducing a decomposed color model, GTM is able to achieve state-of-the-art rendering fidelity while maintaining real-time performance, a significant advantage over NeRF-based methods.
The ability of GTM to handle varying weather and lighting conditions, as well as its successful disentanglement of appearance changes, make it a promising solution for a wide range of applications, from robotics and autonomous vehicles to augmented reality and beyond. As the field of 3D reconstruction continues to evolve, techniques like GTM will play an increasingly important role in enabling more realistic and responsive virtual environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📉
0
Gaussian Time Machine: A Real-Time Rendering Methodology for Time-Variant Appearances
Licheng Shen, Ho Ngai Chow, Lingyun Wang, Tong Zhang, Mengqiu Wang, Yuxing Han
Recent advancements in neural rendering techniques have significantly enhanced the fidelity of 3D reconstruction. Notably, the emergence of 3D Gaussian Splatting (3DGS) has marked a significant milestone by adopting a discrete scene representation, facilitating efficient training and real-time rendering. Several studies have successfully extended the real-time rendering capability of 3DGS to dynamic scenes. However, a challenge arises when training images are captured under vastly differing weather and lighting conditions. This scenario poses a challenge for 3DGS and its variants in achieving accurate reconstructions. Although NeRF-based methods (NeRF-W, CLNeRF) have shown promise in handling such challenging conditions, their computational demands hinder real-time rendering capabilities. In this paper, we present Gaussian Time Machine (GTM) which models the time-dependent attributes of Gaussian primitives with discrete time embedding vectors decoded by a lightweight Multi-Layer-Perceptron(MLP). By adjusting the opacity of Gaussian primitives, we can reconstruct visibility changes of objects. We further propose a decomposed color model for improved geometric consistency. GTM achieved state-of-the-art rendering fidelity on 3 datasets and is 100 times faster than NeRF-based counterparts in rendering. Moreover, GTM successfully disentangles the appearance changes and renders smooth appearance interpolation.
Read more5/24/2024
0
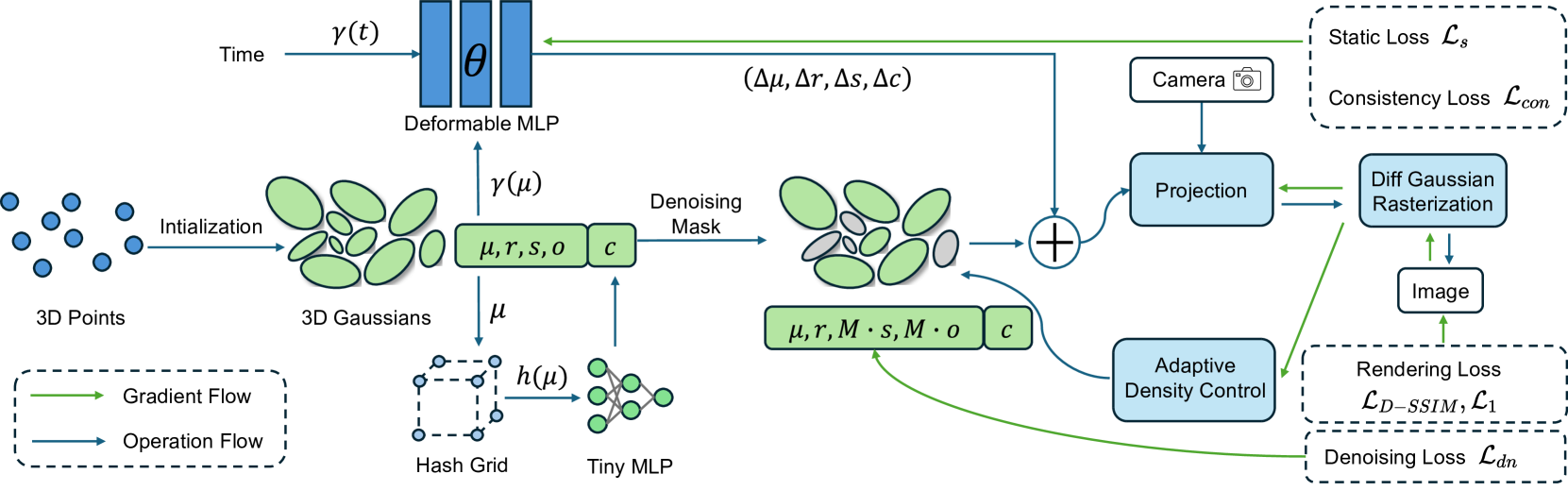
A Refined 3D Gaussian Representation for High-Quality Dynamic Scene Reconstruction
Bin Zhang, Bi Zeng, Zexin Peng
In recent years, Neural Radiance Fields (NeRF) has revolutionized three-dimensional (3D) reconstruction with its implicit representation. Building upon NeRF, 3D Gaussian Splatting (3D-GS) has departed from the implicit representation of neural networks and instead directly represents scenes as point clouds with Gaussian-shaped distributions. While this shift has notably elevated the rendering quality and speed of radiance fields but inevitably led to a significant increase in memory usage. Additionally, effectively rendering dynamic scenes in 3D-GS has emerged as a pressing challenge. To address these concerns, this paper purposes a refined 3D Gaussian representation for high-quality dynamic scene reconstruction. Firstly, we use a deformable multi-layer perceptron (MLP) network to capture the dynamic offset of Gaussian points and express the color features of points through hash encoding and a tiny MLP to reduce storage requirements. Subsequently, we introduce a learnable denoising mask coupled with denoising loss to eliminate noise points from the scene, thereby further compressing 3D Gaussian model. Finally, motion noise of points is mitigated through static constraints and motion consistency constraints. Experimental results demonstrate that our method surpasses existing approaches in rendering quality and speed, while significantly reducing the memory usage associated with 3D-GS, making it highly suitable for various tasks such as novel view synthesis, and dynamic mapping.
Read more5/29/2024

310
WildGaussians: 3D Gaussian Splatting in the Wild
Jonas Kulhanek, Songyou Peng, Zuzana Kukelova, Marc Pollefeys, Torsten Sattler
While the field of 3D scene reconstruction is dominated by NeRFs due to their photorealistic quality, 3D Gaussian Splatting (3DGS) has recently emerged, offering similar quality with real-time rendering speeds. However, both methods primarily excel with well-controlled 3D scenes, while in-the-wild data - characterized by occlusions, dynamic objects, and varying illumination - remains challenging. NeRFs can adapt to such conditions easily through per-image embedding vectors, but 3DGS struggles due to its explicit representation and lack of shared parameters. To address this, we introduce WildGaussians, a novel approach to handle occlusions and appearance changes with 3DGS. By leveraging robust DINO features and integrating an appearance modeling module within 3DGS, our method achieves state-of-the-art results. We demonstrate that WildGaussians matches the real-time rendering speed of 3DGS while surpassing both 3DGS and NeRF baselines in handling in-the-wild data, all within a simple architectural framework.
Read more7/12/2024
0
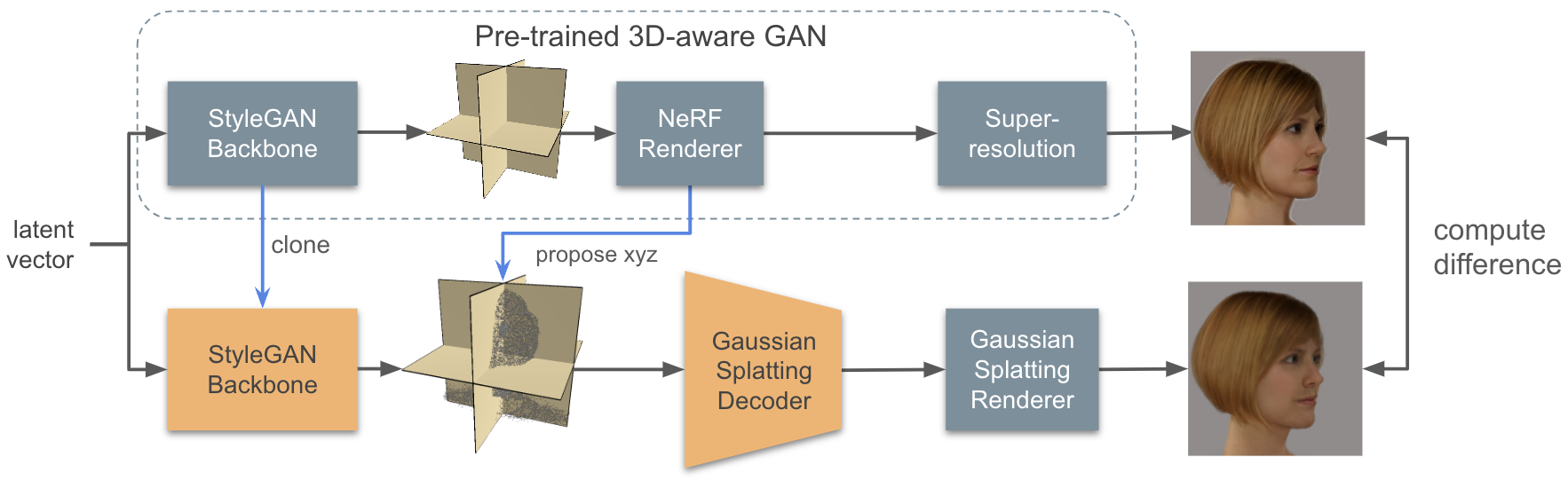
Gaussian Splatting Decoder for 3D-aware Generative Adversarial Networks
Florian Barthel, Arian Beckmann, Wieland Morgenstern, Anna Hilsmann, Peter Eisert
NeRF-based 3D-aware Generative Adversarial Networks (GANs) like EG3D or GIRAFFE have shown very high rendering quality under large representational variety. However, rendering with Neural Radiance Fields poses challenges for 3D applications: First, the significant computational demands of NeRF rendering preclude its use on low-power devices, such as mobiles and VR/AR headsets. Second, implicit representations based on neural networks are difficult to incorporate into explicit 3D scenes, such as VR environments or video games. 3D Gaussian Splatting (3DGS) overcomes these limitations by providing an explicit 3D representation that can be rendered efficiently at high frame rates. In this work, we present a novel approach that combines the high rendering quality of NeRF-based 3D-aware GANs with the flexibility and computational advantages of 3DGS. By training a decoder that maps implicit NeRF representations to explicit 3D Gaussian Splatting attributes, we can integrate the representational diversity and quality of 3D GANs into the ecosystem of 3D Gaussian Splatting for the first time. Additionally, our approach allows for a high resolution GAN inversion and real-time GAN editing with 3D Gaussian Splatting scenes. Project page: florian-barthel.github.io/gaussian_decoder
Read more6/19/2024