GaussianRoom: Improving 3D Gaussian Splatting with SDF Guidance and Monocular Cues for Indoor Scene Reconstruction
2405.19671
0
0
Abstract
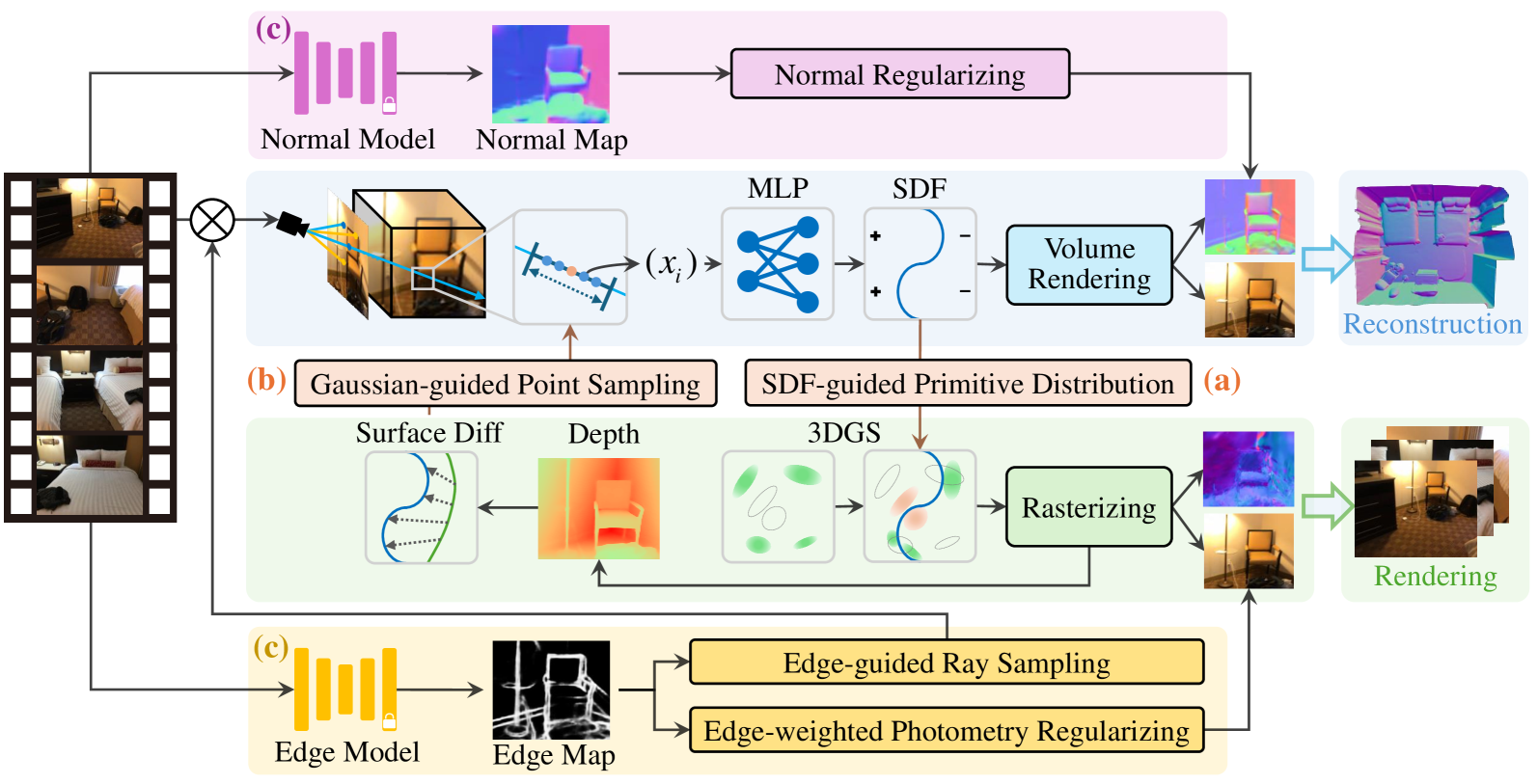
Recently, 3D Gaussian Splatting(3DGS) has revolutionized neural rendering with its high-quality rendering and real-time speed. However, when it comes to indoor scenes with a significant number of textureless areas, 3DGS yields incomplete and noisy reconstruction results due to the poor initialization of the point cloud and under-constrained optimization. Inspired by the continuity of signed distance field (SDF), which naturally has advantages in modeling surfaces, we present a unified optimizing framework integrating neural SDF with 3DGS. This framework incorporates a learnable neural SDF field to guide the densification and pruning of Gaussians, enabling Gaussians to accurately model scenes even with poor initialized point clouds. At the same time, the geometry represented by Gaussians improves the efficiency of the SDF field by piloting its point sampling. Additionally, we regularize the optimization with normal and edge priors to eliminate geometry ambiguity in textureless areas and improve the details. Extensive experiments in ScanNet and ScanNet++ show that our method achieves state-of-the-art performance in both surface reconstruction and novel view synthesis.
Create account to get full access
Overview
- This paper presents "GaussianRoom," a novel approach for indoor scene reconstruction using 3D Gaussian splatting with signed distance field (SDF) guidance and monocular cues.
- The key innovations include using SDF guidance to improve the quality of 3D Gaussian splatting and leveraging monocular cues to enhance the reconstruction of indoor scenes.
- The proposed method aims to address limitations in previous 3D Gaussian splatting techniques, such as Refined 3D Gaussian Representation for High-Quality Dynamic 3D Reconstruction, Recent Advances in 3D Gaussian Splatting, and SA-GS: Semantic-Aware Gaussian Splatting for Large-Scale 3D Reconstruction.
Plain English Explanation
The paper proposes a new method called "GaussianRoom" for reconstructing 3D indoor scenes. The key idea is to use a special mathematical representation called "3D Gaussian splatting" to model the 3D shape of objects in the scene.
Previous work has shown that 3D Gaussian splatting can be effective for reconstructing 3D scenes, but it has some limitations. The GaussianRoom method addresses these limitations in two ways:
-
SDF Guidance: The researchers use a technique called "signed distance field (SDF) guidance" to improve the quality of the 3D Gaussian splatting. This helps the system better capture the precise 3D shape of objects in the scene.
-
Monocular Cues: The researchers also incorporate "monocular cues" - information that can be extracted from a single camera image - to further enhance the 3D reconstruction. This allows the system to better understand the 3D structure of the indoor environment.
By combining these innovations, the GaussianRoom method is able to produce higher-quality 3D reconstructions of indoor scenes compared to previous approaches. This could be useful for applications like virtual reality, robotics, and 3D modeling.
Technical Explanation
The GaussianRoom method builds upon previous work on 3D Gaussian splatting, Recent Advances in 3D Gaussian Splatting, and Semantic-Aware Gaussian Splatting for Large-Scale 3D Reconstruction. The key innovations are:
-
SDF Guidance: The researchers use a signed distance field (SDF) to guide the 3D Gaussian splatting process. The SDF encodes the 3D shape of objects in the scene, allowing the system to better capture fine details and object boundaries during reconstruction.
-
Monocular Cues: The method also incorporates monocular cues, such as shading, texture, and perspective, to further enhance the 3D reconstruction. This allows the system to better understand the 3D structure of the indoor environment.
The paper presents a detailed evaluation of the GaussianRoom method on several indoor scene reconstruction benchmarks. The results demonstrate that the proposed approach outperforms previous state-of-the-art techniques in terms of reconstruction quality and robustness.
Critical Analysis
The GaussianRoom method represents an interesting advance in 3D indoor scene reconstruction, but there are a few potential limitations and areas for further research:
-
Computational Complexity: The use of SDF guidance and monocular cues may increase the computational complexity of the system, which could be a concern for real-time applications or resource-constrained devices. The paper does not provide a detailed analysis of the runtime performance.
-
Sensor Dependency: The method relies on both RGB and depth data, which may limit its applicability to scenarios where only monocular camera inputs are available. Further exploration of monocular-only reconstruction capabilities could be beneficial.
-
Generalization Ability: The paper focuses on indoor scene reconstruction, but it is not clear how well the GaussianRoom method would generalize to outdoor environments or more diverse scene types. Evaluating the method's performance in a wider range of settings would be valuable.
-
Interpretability: The paper does not provide much insight into the internal workings of the GaussianRoom system or the specific contributions of the SDF guidance and monocular cues. A more detailed analysis of the system's behavior and failure modes could help researchers understand its strengths and limitations better.
Overall, the GaussianRoom method represents an interesting and promising approach to 3D indoor scene reconstruction, but further research and evaluation could help address some of the potential limitations and expand the scope of its applicability.
Conclusion
The GaussianRoom method proposed in this paper offers a novel approach to 3D indoor scene reconstruction by leveraging SDF guidance and monocular cues to improve the quality of 3D Gaussian splatting. The key innovations address limitations in previous 3D Gaussian splatting techniques, leading to more accurate and robust 3D reconstructions of indoor environments.
The potential impact of this research is significant, as high-quality 3D reconstruction is crucial for a wide range of applications, including virtual reality, robotics, and 3D modeling. By further developing and refining the GaussianRoom method, researchers may be able to unlock new possibilities in these domains and contribute to the ongoing progress in 3D scene understanding.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

PGSR: Planar-based Gaussian Splatting for Efficient and High-Fidelity Surface Reconstruction
Danpeng Chen, Hai Li, Weicai Ye, Yifan Wang, Weijian Xie, Shangjin Zhai, Nan Wang, Haomin Liu, Hujun Bao, Guofeng Zhang
0
0
Recently, 3D Gaussian Splatting (3DGS) has attracted widespread attention due to its high-quality rendering, and ultra-fast training and rendering speed. However, due to the unstructured and irregular nature of Gaussian point clouds, it is difficult to guarantee geometric reconstruction accuracy and multi-view consistency simply by relying on image reconstruction loss. Although many studies on surface reconstruction based on 3DGS have emerged recently, the quality of their meshes is generally unsatisfactory. To address this problem, we propose a fast planar-based Gaussian splatting reconstruction representation (PGSR) to achieve high-fidelity surface reconstruction while ensuring high-quality rendering. Specifically, we first introduce an unbiased depth rendering method, which directly renders the distance from the camera origin to the Gaussian plane and the corresponding normal map based on the Gaussian distribution of the point cloud, and divides the two to obtain the unbiased depth. We then introduce single-view geometric, multi-view photometric, and geometric regularization to preserve global geometric accuracy. We also propose a camera exposure compensation model to cope with scenes with large illumination variations. Experiments on indoor and outdoor scenes show that our method achieves fast training and rendering while maintaining high-fidelity rendering and geometric reconstruction, outperforming 3DGS-based and NeRF-based methods.
6/11/2024

GS-Octree: Octree-based 3D Gaussian Splatting for Robust Object-level 3D Reconstruction Under Strong Lighting
Jiaze Li, Zhengyu Wen, Luo Zhang, Jiangbei Hu, Fei Hou, Zhebin Zhang, Ying He
0
0
The 3D Gaussian Splatting technique has significantly advanced the construction of radiance fields from multi-view images, enabling real-time rendering. While point-based rasterization effectively reduces computational demands for rendering, it often struggles to accurately reconstruct the geometry of the target object, especially under strong lighting. To address this challenge, we introduce a novel approach that combines octree-based implicit surface representations with Gaussian splatting. Our method consists of four stages. Initially, it reconstructs a signed distance field (SDF) and a radiance field through volume rendering, encoding them in a low-resolution octree. The initial SDF represents the coarse geometry of the target object. Subsequently, it introduces 3D Gaussians as additional degrees of freedom, which are guided by the SDF. In the third stage, the optimized Gaussians further improve the accuracy of the SDF, allowing it to recover finer geometric details compared to the initial SDF obtained in the first stage. Finally, it adopts the refined SDF to further optimize the 3D Gaussians via splatting, eliminating those that contribute little to visual appearance. Experimental results show that our method, which leverages the distribution of 3D Gaussians with SDFs, reconstructs more accurate geometry, particularly in images with specular highlights caused by strong lighting.
6/27/2024
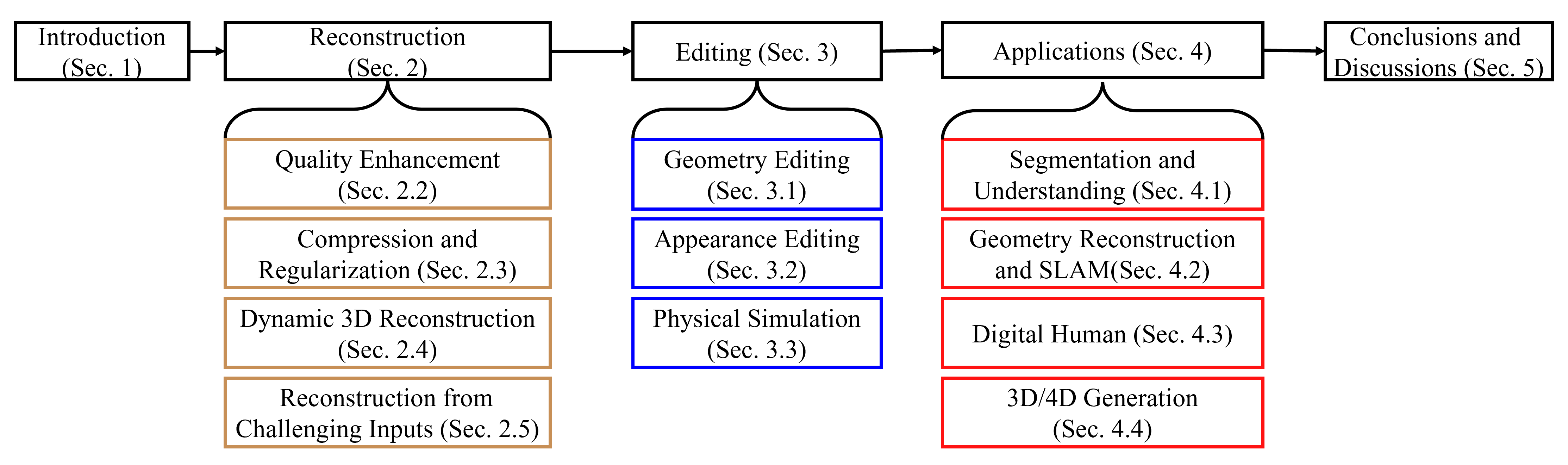
Recent Advances in 3D Gaussian Splatting
Tong Wu, Yu-Jie Yuan, Ling-Xiao Zhang, Jie Yang, Yan-Pei Cao, Ling-Qi Yan, Lin Gao
0
0
The emergence of 3D Gaussian Splatting (3DGS) has greatly accelerated the rendering speed of novel view synthesis. Unlike neural implicit representations like Neural Radiance Fields (NeRF) that represent a 3D scene with position and viewpoint-conditioned neural networks, 3D Gaussian Splatting utilizes a set of Gaussian ellipsoids to model the scene so that efficient rendering can be accomplished by rasterizing Gaussian ellipsoids into images. Apart from the fast rendering speed, the explicit representation of 3D Gaussian Splatting facilitates editing tasks like dynamic reconstruction, geometry editing, and physical simulation. Considering the rapid change and growing number of works in this field, we present a literature review of recent 3D Gaussian Splatting methods, which can be roughly classified into 3D reconstruction, 3D editing, and other downstream applications by functionality. Traditional point-based rendering methods and the rendering formulation of 3D Gaussian Splatting are also illustrated for a better understanding of this technique. This survey aims to help beginners get into this field quickly and provide experienced researchers with a comprehensive overview, which can stimulate the future development of the 3D Gaussian Splatting representation.
4/16/2024
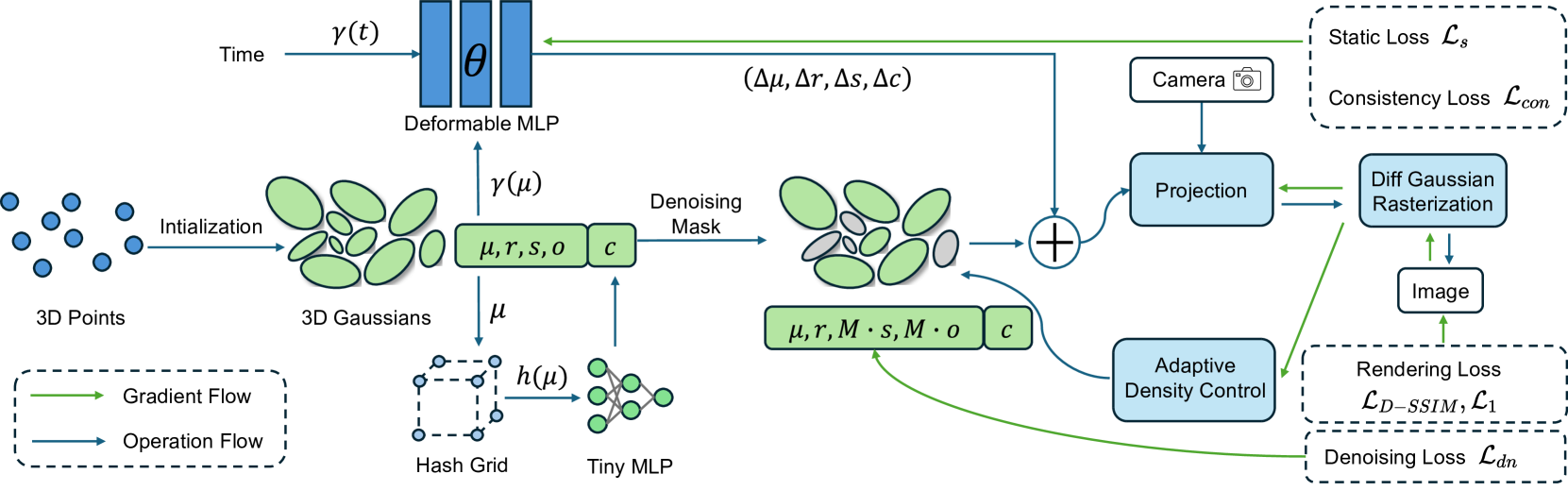
A Refined 3D Gaussian Representation for High-Quality Dynamic Scene Reconstruction
Bin Zhang, Bi Zeng, Zexin Peng
0
0
In recent years, Neural Radiance Fields (NeRF) has revolutionized three-dimensional (3D) reconstruction with its implicit representation. Building upon NeRF, 3D Gaussian Splatting (3D-GS) has departed from the implicit representation of neural networks and instead directly represents scenes as point clouds with Gaussian-shaped distributions. While this shift has notably elevated the rendering quality and speed of radiance fields but inevitably led to a significant increase in memory usage. Additionally, effectively rendering dynamic scenes in 3D-GS has emerged as a pressing challenge. To address these concerns, this paper purposes a refined 3D Gaussian representation for high-quality dynamic scene reconstruction. Firstly, we use a deformable multi-layer perceptron (MLP) network to capture the dynamic offset of Gaussian points and express the color features of points through hash encoding and a tiny MLP to reduce storage requirements. Subsequently, we introduce a learnable denoising mask coupled with denoising loss to eliminate noise points from the scene, thereby further compressing 3D Gaussian model. Finally, motion noise of points is mitigated through static constraints and motion consistency constraints. Experimental results demonstrate that our method surpasses existing approaches in rendering quality and speed, while significantly reducing the memory usage associated with 3D-GS, making it highly suitable for various tasks such as novel view synthesis, and dynamic mapping.
5/29/2024