General Flow as Foundation Affordance for Scalable Robot Learning

0

Sign in to get full access
Overview
- Presents a novel approach called "general flow" to enable scalable robot learning for complex manipulation tasks
- Builds on the concept of "affordances" to provide a flexible and adaptable framework for robot learning
- Demonstrates the effectiveness of the general flow approach through experiments on various manipulation tasks
Plain English Explanation
The paper introduces a new concept called "general flow" as a way to enable robots to learn and perform complex manipulation tasks in a scalable and adaptable manner. The general flow approach is built on the idea of "affordances," which are the possible actions or interactions that an object or environment affords to an agent.
By representing manipulation tasks as a "flow" of these affordances, the researchers show that robots can learn to perform a wide variety of tasks without the need for extensive task-specific training. This allows for more efficient and scalable robot learning, as the same general flow framework can be applied to different manipulation scenarios.
The key advantage of the general flow approach is that it provides a flexible and adaptable foundation for robot learning, rather than relying on rigid, task-specific models. This makes the system more robust and able to generalize to new situations, which is crucial for real-world applications where robots may face a variety of unpredictable challenges.
Technical Explanation
The paper presents the "general flow" approach as a way to enable scalable robot learning for complex manipulation tasks. The core idea is to represent manipulation tasks as a "flow" of "affordances," which are the possible actions or interactions that an object or environment affords to an agent.
By modeling manipulation tasks in this way, the researchers show that robots can learn to perform a wide variety of tasks without the need for extensive task-specific training. The general flow framework provides a flexible and adaptable foundation for robot learning, allowing the same approach to be applied to different manipulation scenarios.
The authors demonstrate the effectiveness of the general flow approach through a series of experiments on various manipulation tasks, including object grasping, tool use, and multi-step sequences. The results show that the general flow model can outperform traditional task-specific approaches in terms of both performance and sample efficiency.
One key aspect of the general flow approach is its ability to leverage cross-domain knowledge, allowing robots to transfer skills and insights from one task to another. This is achieved by representing manipulation tasks as a flow of affordances, rather than as rigid, task-specific models.
Critical Analysis
The general flow approach presented in the paper is a promising step towards more scalable and adaptable robot learning. By focusing on the underlying affordances of manipulation tasks, rather than task-specific details, the researchers have developed a framework that can be applied to a wide range of scenarios.
However, the paper does not address several important considerations. For example, the authors do not discuss the potential challenges of accurately identifying and representing the affordances in complex, real-world environments. Additionally, the experiments are limited to relatively simple manipulation tasks, and it's unclear how the general flow approach would scale to more complex, multi-step sequences or novel situations.
Further research is needed to explore the limitations and potential issues with the general flow approach. For instance, it would be valuable to investigate how the system performs in the face of uncertainty, partial observability, or adversarial perturbations. Additionally, the authors could explore ways to incorporate more sophisticated learning mechanisms, such as hierarchical or meta-learning, to further enhance the adaptability and generalization capabilities of the system.
Conclusion
The general flow approach presented in this paper represents a significant step forward in the field of robot learning. By shifting the focus from task-specific models to a more flexible and adaptable framework based on affordances, the researchers have developed a promising avenue for enabling scalable and versatile robot learning.
While the paper does not address all of the potential challenges and limitations of the general flow approach, it lays the groundwork for further research and development in this area. As robotics continues to evolve, the ability to create systems that can learn and adapt to a wide range of scenarios will be increasingly important, and the general flow approach may play a valuable role in this pursuit.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
General Flow as Foundation Affordance for Scalable Robot Learning
Chengbo Yuan, Chuan Wen, Tong Zhang, Yang Gao
We address the challenge of acquiring real-world manipulation skills with a scalable framework. We hold the belief that identifying an appropriate prediction target capable of leveraging large-scale datasets is crucial for achieving efficient and universal learning. Therefore, we propose to utilize 3D flow, which represents the future trajectories of 3D points on objects of interest, as an ideal prediction target. To exploit scalable data resources, we turn our attention to human videos. We develop, for the first time, a language-conditioned 3D flow prediction model directly from large-scale RGBD human video datasets. Our predicted flow offers actionable guidance, thus facilitating zero-shot skill transfer in real-world scenarios. We deploy our method with a policy based on closed-loop flow prediction. Remarkably, without any in-domain finetuning, our method achieves an impressive 81% success rate in zero-shot human-to-robot skill transfer, covering 18 tasks in 6 scenes. Our framework features the following benefits: (1) scalability: leveraging cross-embodiment data resources; (2) wide application: multiple object categories, including rigid, articulated, and soft bodies; (3) stable skill transfer: providing actionable guidance with a small inference domain-gap. Code, data, and supplementary materials are available https://general-flow.github.io
Read more9/24/2024

0
Affordance-based Robot Manipulation with Flow Matching
Fan Zhang, Michael Gienger
We present a framework for assistive robot manipulation, which focuses on two fundamental challenges: first, efficiently adapting large-scale models to downstream scene affordance understanding tasks, especially in daily living scenarios where gathering multi-task data involving humans requires strenuous effort; second, effectively learning robot trajectories by grounding the visual affordance model. We tackle the first challenge by employing a parameter-efficient prompt tuning method that prepends learnable text prompts to the frozen vision model to predict manipulation affordances in multi-task scenarios. Then we propose to learn robot trajectories guided by affordances in a supervised Flow Matching method. Flow matching represents a robot visuomotor policy as a conditional process of flowing random waypoints to desired robot trajectories. Finally, we introduce a real-world dataset with 10 tasks across Activities of Daily Living to test our framework. Our extensive evaluation highlights that the proposed prompt tuning method for learning manipulation affordance with language prompter achieves competitive performance and even outperforms other finetuning protocols across data scales, while satisfying parameter efficiency. Learning multi-task robot trajectories with a single flow matching policy also leads to consistently better performance than alternative behavior cloning methods, especially given multimodal robot action distributions. Our framework seamlessly unifies affordance model learning and trajectory generation with flow matching for robot manipulation.
Read more9/4/2024
0
Flow as the Cross-Domain Manipulation Interface
Mengda Xu, Zhenjia Xu, Yinghao Xu, Cheng Chi, Gordon Wetzstein, Manuela Veloso, Shuran Song
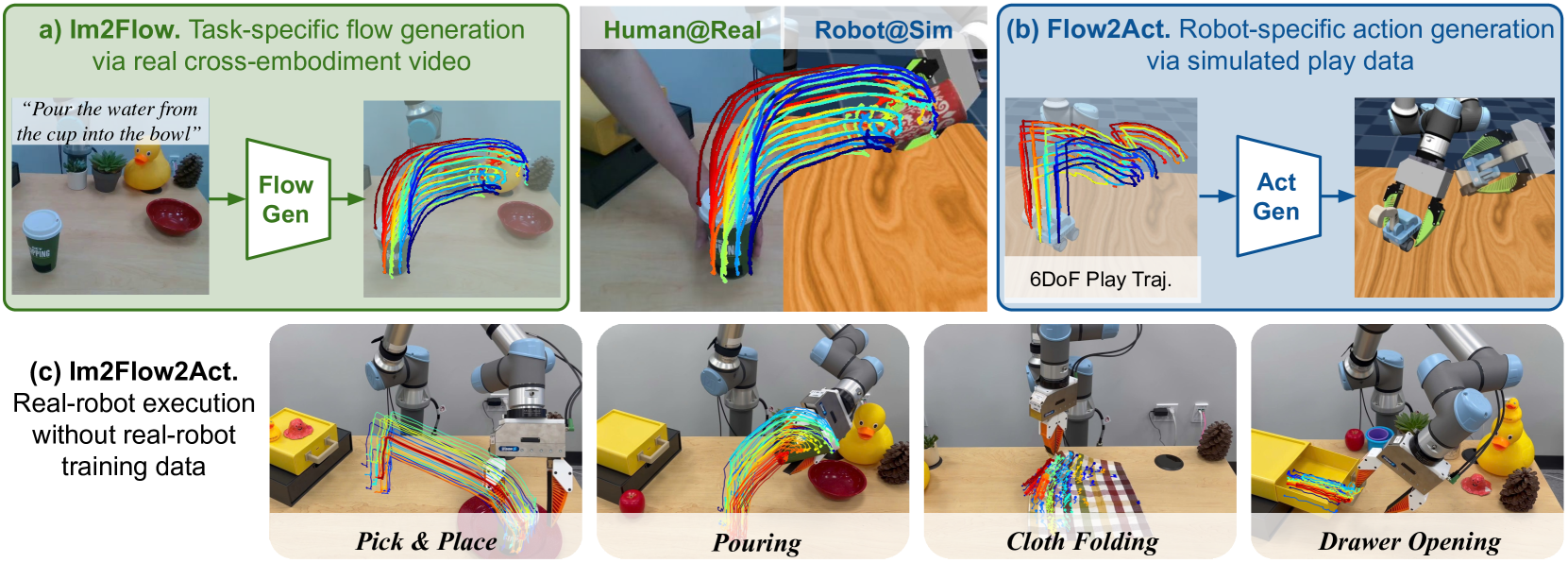
We present Im2Flow2Act, a scalable learning framework that enables robots to acquire manipulation skills from diverse data sources. The key idea behind Im2Flow2Act is to use object flow as the manipulation interface, bridging domain gaps between different embodiments (i.e., human and robot) and training environments (i.e., real-world and simulated). Im2Flow2Act comprises two components: a flow generation network and a flow-conditioned policy. The flow generation network, trained on human demonstration videos, generates object flow from the initial scene image, conditioned on the task description. The flow-conditioned policy, trained on simulated robot play data, maps the generated object flow to robot actions to realize the desired object movements. By using flow as input, this policy can be directly deployed in the real world with a minimal sim-to-real gap. By leveraging real-world human videos and simulated robot play data, we bypass the challenges of teleoperating physical robots in the real world, resulting in a scalable system for diverse tasks. We demonstrate Im2Flow2Act's capabilities in a variety of real-world tasks, including the manipulation of rigid, articulated, and deformable objects.
Read more7/23/2024
🔮
0
Learning Distributions over Trajectories for Human Behavior Prediction
Anna M'esz'aros, Julian F. Schumann, Javier Alonso-Mora, Arkady Zgonnikov, Jens Kober
Predicting the future behavior of human road users is an important aspect for the development of risk-aware autonomous vehicles. While many models have been developed towards this end, effectively capturing and predicting the variability inherent to human behavior still remains an open challenge. This paper proposes TrajFlow - a new approach for probabilistic trajectory prediction based on Normalizing Flows. We reformulate the problem of capturing distributions over trajectories into capturing distributions over abstracted trajectory features using an autoencoder, simplifying the learning task of the Normalizing Flows. TrajFlow outperforms state-of-the-art behavior prediction models in capturing full trajectory distributions in two synthetic benchmarks with known true distributions, and is competitive on the naturalistic datasets ETH/UCY, rounD, and nuScenes. Our results demonstrate the effectiveness of TrajFlow in probabilistic prediction of human behavior.
Read more4/22/2024