Generating Physical Dynamics under Priors

0

Sign in to get full access
Overview
- This paper explores a novel approach for generating physical dynamics under prior knowledge and constraints.
- The key idea is to leverage diffusion models, which are a class of generative models, to learn and generate physically plausible motions and behaviors.
- The researchers demonstrate the effectiveness of their approach through several experiments, including simulating the motion of rigid bodies and fluids.
Plain English Explanation
The researchers in this paper have developed a new way to generate realistic physical movements and behaviors using a type of machine learning model called a diffusion model. Diffusion models are a class of generative models, which means they can create new data that looks similar to the training data.
In this case, the researchers trained the diffusion model on examples of physical phenomena, like the movement of rigid objects or the flow of fluids. By learning the patterns and rules that govern these physical processes, the diffusion model was then able to generate new, plausible-looking physical motions and behaviors, even without having seen those exact scenarios before.
This is a powerful approach because it allows the model to create physically realistic simulations without needing to explicitly program all the underlying physics equations. Instead, the model learns the relevant physical principles from the training data and can then apply that knowledge to generate new, synthetic physical dynamics.
The researchers show that this method can produce compelling results across a variety of physical domains, from rigid body motion to fluid dynamics. This suggests that diffusion models could be a useful tool for applications like computer animation, robotics, and scientific modeling, where generating realistic physical behavior is important.
Technical Explanation
The key component of this work is the use of diffusion models to learn and generate physical dynamics. Diffusion models are a class of generative models that work by learning to reverse a process of gradually adding noise to data.
In this case, the researchers trained the diffusion model on datasets of physical phenomena, such as the motion of rigid bodies or the flow of fluids. By learning to reverse the noise addition process, the model was able to capture the underlying physical principles and dynamics present in the training data.
The researchers then showed that this diffusion model could be used to generate new, physically plausible motions and behaviors, even for scenarios it had not been explicitly trained on. This was achieved by sampling from the learned diffusion model and using techniques like physics-integrated 3D Gaussians to ensure the generated outputs respected relevant physical constraints.
Through a series of experiments, the researchers demonstrated the effectiveness of their approach for simulating the motion of rigid bodies, fluids, and other physical systems. The results suggest that diffusion models can be a powerful tool for generating realistic physical dynamics, with potential applications in areas like computer animation, robotics, and scientific modeling.
Critical Analysis
The researchers present a compelling approach for leveraging diffusion models to generate physically plausible dynamics. A key strength is the ability to capture physical principles from training data, rather than relying on explicitly programmed physics equations. This could make the technique more flexible and adaptable to a wider range of physical phenomena.
However, the paper does acknowledge some limitations. For example, the diffusion model may struggle to capture long-range spatial dependencies or complex, multi-scale physical interactions. There is also the potential for the generated dynamics to diverge from true physical behavior over long time horizons.
Additionally, while the experiments demonstrate the effectiveness of the approach on a range of physical systems, further research may be needed to fully understand the breadth of its applicability and the types of physical domains where it performs best. Careful evaluation of the model's generalization capabilities and robustness would also be important.
Overall, this work represents an interesting and promising step forward in the use of diffusion models for physical simulation and generation. With further refinement and validation, the techniques introduced here could find valuable applications in a variety of fields that require realistic and physically plausible dynamic modeling.
Conclusion
This paper presents a novel approach for generating physical dynamics using diffusion models, a class of generative machine learning models. By training the diffusion model on examples of physical phenomena, the researchers were able to capture the underlying principles and rules that govern these processes. The model could then be used to generate new, physically plausible motions and behaviors, even for scenarios it had not been explicitly trained on.
The researchers demonstrated the effectiveness of their approach through a series of experiments, showing its applicability to simulating the motion of rigid bodies, fluids, and other physical systems. This suggests that diffusion models could be a powerful tool for a wide range of applications, from computer animation and robotics to scientific modeling and simulation.
While the paper acknowledges some limitations, the core idea of leveraging diffusion models for physical dynamics generation represents an exciting development in the field. With further research and refinement, this work could lead to significant advancements in our ability to create realistic and physically accurate simulations, with far-reaching implications for both science and technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Generating Physical Dynamics under Priors
Zihan Zhou, Xiaoxue Wang, Tianshu Yu
Generating physically feasible dynamics in a data-driven context is challenging, especially when adhering to physical priors expressed in specific equations or formulas. Existing methodologies often overlook the integration of physical priors, resulting in violation of basic physical laws and suboptimal performance. In this paper, we introduce a novel framework that seamlessly incorporates physical priors into diffusion-based generative models to address this limitation. Our approach leverages two categories of priors: 1) distributional priors, such as roto-translational invariance, and 2) physical feasibility priors, including energy and momentum conservation laws and PDE constraints. By embedding these priors into the generative process, our method can efficiently generate physically realistic dynamics, encompassing trajectories and flows. Empirical evaluations demonstrate that our method produces high-quality dynamics across a diverse array of physical phenomena with remarkable robustness, underscoring its potential to advance data-driven studies in AI4Physics. Our contributions signify a substantial advancement in the field of generative modeling, offering a robust solution to generate accurate and physically consistent dynamics.
Read more9/4/2024
🤯
0
From latent dynamics to meaningful representations
Dedi Wang, Yihang Wang, Luke Evans, Pratyush Tiwary
While representation learning has been central to the rise of machine learning and artificial intelligence, a key problem remains in making the learned representations meaningful. For this, the typical approach is to regularize the learned representation through prior probability distributions. However, such priors are usually unavailable or are ad hoc. To deal with this, recent efforts have shifted towards leveraging the insights from physical principles to guide the learning process. In this spirit, we propose a purely dynamics-constrained representation learning framework. Instead of relying on predefined probabilities, we restrict the latent representation to follow overdamped Langevin dynamics with a learnable transition density - a prior driven by statistical mechanics. We show this is a more natural constraint for representation learning in stochastic dynamical systems, with the crucial ability to uniquely identify the ground truth representation. We validate our framework for different systems including a real-world fluorescent DNA movie dataset. We show that our algorithm can uniquely identify orthogonal, isometric and meaningful latent representations.
Read more4/11/2024
0
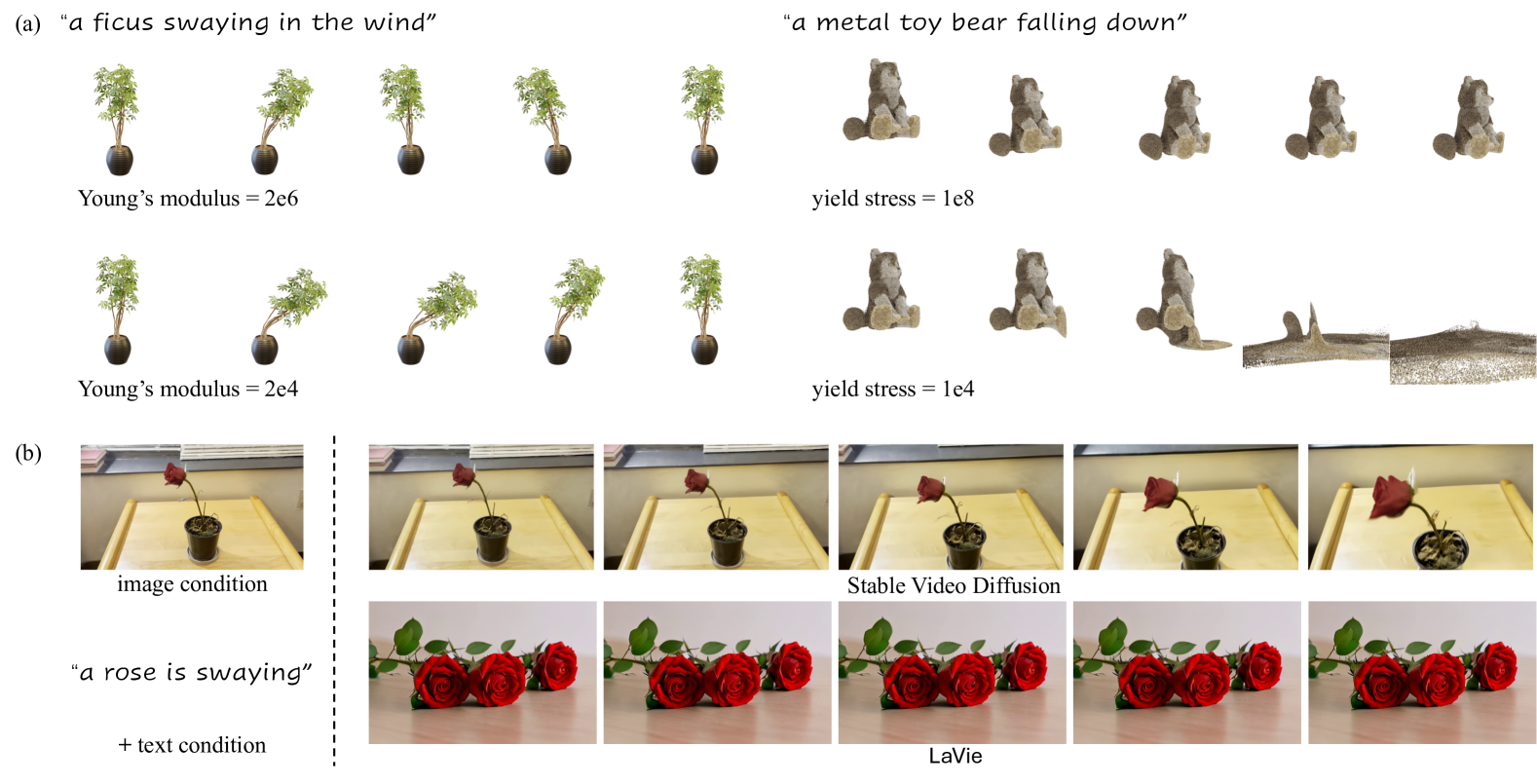
DreamPhysics: Learning Physical Properties of Dynamic 3D Gaussians with Video Diffusion Priors
Tianyu Huang, Haoze Zhang, Yihan Zeng, Zhilu Zhang, Hui Li, Wangmeng Zuo, Rynson W. H. Lau
Dynamic 3D interaction has been attracting a lot of attention recently. However, creating such 4D content remains challenging. One solution is to animate 3D scenes with physics-based simulation, which requires manually assigning precise physical properties to the object or the simulated results would become unnatural. Another solution is to learn the deformation of 3D objects with the distillation of video generative models, which, however, tends to produce 3D videos with small and discontinuous motions due to the inappropriate extraction and application of physical prior. In this work, combining the strengths and complementing shortcomings of the above two solutions, we propose to learn the physical properties of a material field with video diffusion priors, and then utilize a physics-based Material-Point-Method (MPM) simulator to generate 4D content with realistic motions. In particular, we propose motion distillation sampling to emphasize video motion information during distillation. Moreover, to facilitate the optimization, we further propose a KAN-based material field with frame boosting. Experimental results demonstrate that our method enjoys more realistic motion than state-of-the-arts. Codes are released at: https://github.com/tyhuang0428/DreamPhysics.
Read more9/2/2024

0
Generating Synthetic Net Load Data with Physics-informed Diffusion Model
Shaorong Zhang, Yuanbin Cheng, Nanpeng Yu
This paper presents a novel physics-informed diffusion model for generating synthetic net load data, addressing the challenges of data scarcity and privacy concerns. The proposed framework embeds physical models within denoising networks, offering a versatile approach that can be readily generalized to unforeseen scenarios. A conditional denoising neural network is designed to jointly train the parameters of the transition kernel of the diffusion model and the parameters of the physics-informed function. Utilizing the real-world smart meter data from Pecan Street, we validate the proposed method and conduct a thorough numerical study comparing its performance with state-of-the-art generative models, including generative adversarial networks, variational autoencoders, normalizing flows, and a well calibrated baseline diffusion model. A comprehensive set of evaluation metrics is used to assess the accuracy and diversity of the generated synthetic net load data. The numerical study results demonstrate that the proposed physics-informed diffusion model outperforms state-of-the-art models across all quantitative metrics, yielding at least 20% improvement.
Read more6/5/2024