Get a Grip: Reconstructing Hand-Object Stable Grasps in Egocentric Videos
2312.15719
0
0

Abstract
We propose the task of Hand-Object Stable Grasp Reconstruction (HO-SGR), the reconstruction of frames during which the hand is stably holding the object. We first develop the stable grasp definition based on the intuition that the in-contact area between the hand and object should remain stable. By analysing the 3D ARCTIC dataset, we identify stable grasp durations and showcase that objects in stable grasps move within a single degree of freedom (1-DoF). We thereby propose a method to jointly optimise all frames within a stable grasp, minimising object motions to a latent 1-DoF. Finally, we extend the knowledge to in-the-wild videos by labelling 2.4K clips of stable grasps. Our proposed EPIC-Grasps dataset includes 390 object instances of 9 categories, featuring stable grasps from videos of daily interactions in 141 environments. Without 3D ground truth, we use stable contact areas and 2D projection masks to assess the HO-SGR task in the wild. We evaluate relevant methods and our approach preserves significantly higher stable contact area, on both EPIC-Grasps and stable grasp sub-sequences from the ARCTIC dataset.
Create account to get full access
Overview
- This paper presents a method for reconstructing stable hand-object grasps from egocentric (first-person) video data.
- The approach aims to identify the hand's configuration and the object's pose that result in a stable grasp, which is important for tasks like robotic manipulation and augmented reality applications.
- The authors propose a neural network architecture that can jointly estimate the hand and object poses from a single frame, and then reason about the stability of the resulting grasp.
Plain English Explanation
The paper focuses on a problem called "hand-object grasp reconstruction" - figuring out how a person's hand is interacting with an object they are holding in a video. This is an important task for things like robotic arms that need to pick up and manipulate objects, or augmented reality systems that want to make digital objects look realistic when a person's hand interacts with them.
The key idea is to develop a neural network that can look at a single frame from a video and figure out two things: 1) the exact position and orientation of the person's hand, and 2) the exact position and orientation of the object the hand is interacting with. With this information, the system can then analyze whether the hand has a "stable grasp" on the object - meaning the hand is holding the object in a way that is secure and unlikely to drop it.
By being able to reconstruct these stable grasps from video, the system could help robots or augmented reality applications better understand how people naturally interact with objects in the real world. This could lead to more natural and intuitive interfaces for these technologies.
Technical Explanation
The paper proposes a neural network architecture called "CenterGrasp" that can jointly estimate the 6D poses (3D position + 3D orientation) of both the hand and the object being grasped from a single RGB image. The network uses an "object-aware" approach, where the hand and object pose estimates are conditioned on each other to capture their coordinated interaction.
To train and evaluate the system, the authors collected a large dataset of egocentric videos showing people interacting with various objects. They manually annotated the hand and object poses in a subset of the frames, which was used to supervise the network's training.
The key insight is that by reasoning about the hand-object interaction, the network can better infer the stable grasps - configurations where the hand is securely holding the object and unlikely to drop it. This is evaluated using physics-based simulation to test the grasp stability.
The experiments show that the CenterGrasp approach outperforms prior methods on benchmarks for hand-object pose estimation and grasp stability prediction. This demonstrates the value of the object-aware modeling for reconstructing natural, stable human grasps from egocentric video.
Critical Analysis
The paper makes a compelling case for the importance of joint hand-object pose estimation and stability analysis for applications like robotic manipulation and augmented reality. The proposed CenterGrasp architecture appears to be a promising technical approach, with strong empirical results on benchmark datasets.
One limitation is that the training and evaluation was done using pre-recorded egocentric videos, rather than real-time interactions. Deploying such a system in the real world would likely require additional challenges around real-time processing and handling occlusions or other visual complexities.
The authors also note that their stability analysis is based on simplified physics simulations, which may not fully capture the nuances of real-world object interactions. Incorporating more sophisticated physical modeling could be an area for future research.
Additionally, while the paper focuses on single-frame pose estimation, extending the approach to leverage temporal information from video sequences could potentially improve the accuracy and robustness of the grasp reconstruction.
Overall, this work represents an important step towards more natural and intuitive human-object interaction capabilities for robotic and AR/VR systems. Further research building on these ideas could have significant real-world impact.
Conclusion
This paper presents a novel neural network architecture called CenterGrasp that can reconstruct stable hand-object grasps from single frames of egocentric video. By jointly estimating the 6D poses of the hand and object and reasoning about their coordinated interaction, the system is able to identify configurations that result in secure, stable grasps.
The strong empirical results on benchmark datasets demonstrate the value of this object-aware approach for applications like robotic manipulation and augmented reality, where understanding natural human grasping behavior is crucial. While there are some limitations and areas for future work, this research represents an important contribution towards more intuitive human-object interaction capabilities for emerging technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

GenHeld: Generating and Editing Handheld Objects
Chaerin Min, Srinath Sridhar
0
0
Grasping is an important human activity that has long been studied in robotics, computer vision, and cognitive science. Most existing works study grasping from the perspective of synthesizing hand poses conditioned on 3D or 2D object representations. We propose GenHeld to address the inverse problem of synthesizing held objects conditioned on 3D hand model or 2D image. Given a 3D model of hand, GenHeld 3D can select a plausible held object from a large dataset using compact object representations called object codes.The selected object is then positioned and oriented to form a plausible grasp without changing hand pose. If only a 2D hand image is available, GenHeld 2D can edit this image to add or replace a held object. GenHeld 2D operates by combining the abilities of GenHeld 3D with diffusion-based image editing. Results and experiments show that we outperform baselines and can generate plausible held objects in both 2D and 3D. Our experiments demonstrate that our method achieves high quality and plausibility of held object synthesis in both 3D and 2D.
6/18/2024
CenterGrasp: Object-Aware Implicit Representation Learning for Simultaneous Shape Reconstruction and 6-DoF Grasp Estimation
Eugenio Chisari, Nick Heppert, Tim Welschehold, Wolfram Burgard, Abhinav Valada
0
0
Reliable object grasping is a crucial capability for autonomous robots. However, many existing grasping approaches focus on general clutter removal without explicitly modeling objects and thus only relying on the visible local geometry. We introduce CenterGrasp, a novel framework that combines object awareness and holistic grasping. CenterGrasp learns a general object prior by encoding shapes and valid grasps in a continuous latent space. It consists of an RGB-D image encoder that leverages recent advances to detect objects and infer their pose and latent code, and a decoder to predict shape and grasps for each object in the scene. We perform extensive experiments on simulated as well as real-world cluttered scenes and demonstrate strong scene reconstruction and 6-DoF grasp-pose estimation performance. Compared to the state of the art, CenterGrasp achieves an improvement of 38.5 mm in shape reconstruction and 33 percentage points on average in grasp success. We make the code and trained models publicly available at http://centergrasp.cs.uni-freiburg.de.
4/8/2024
Reconstructing Hand-Held Objects in 3D
Jane Wu, Georgios Pavlakos, Georgia Gkioxari, Jitendra Malik
0
0
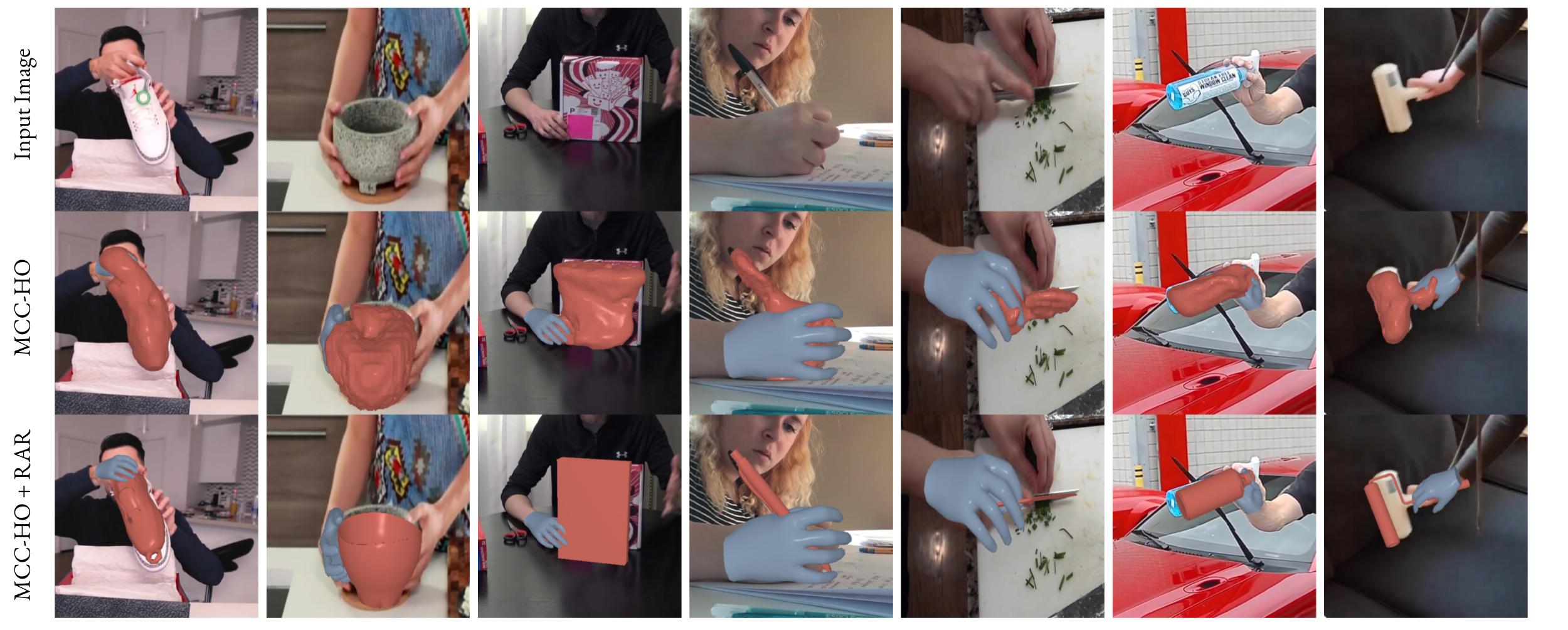
Objects manipulated by the hand (i.e., manipulanda) are particularly challenging to reconstruct from in-the-wild RGB images or videos. Not only does the hand occlude much of the object, but also the object is often only visible in a small number of image pixels. At the same time, two strong anchors emerge in this setting: (1) estimated 3D hands help disambiguate the location and scale of the object, and (2) the set of manipulanda is small relative to all possible objects. With these insights in mind, we present a scalable paradigm for handheld object reconstruction that builds on recent breakthroughs in large language/vision models and 3D object datasets. Our model, MCC-Hand-Object (MCC-HO), jointly reconstructs hand and object geometry given a single RGB image and inferred 3D hand as inputs. Subsequently, we use GPT-4(V) to retrieve a 3D object model that matches the object in the image and rigidly align the model to the network-inferred geometry; we call this alignment Retrieval-Augmented Reconstruction (RAR). Experiments demonstrate that MCC-HO achieves state-of-the-art performance on lab and Internet datasets, and we show how RAR can be used to automatically obtain 3D labels for in-the-wild images of hand-object interactions.
4/11/2024

Multi-fingered Robotic Hand Grasping in Cluttered Environments through Hand-object Contact Semantic Mapping
Lei Zhang, Kaixin Bai, Guowen Huang, Zhaopeng Chen, Jianwei Zhang
0
0
The integration of optimization method and generative models has significantly advanced dexterous manipulation techniques for five-fingered hand grasping. Yet, the application of these techniques in cluttered environments is a relatively unexplored area. To address this research gap, we have developed a novel method for generating five-fingered hand grasp samples in cluttered settings. This method emphasizes simulated grasp quality and the nuanced interaction between the hand and surrounding objects. A key aspect of our approach is our data generation method, capable of estimating contact spatial and semantic representations and affordance grasps based on object affordance information. Furthermore, our Contact Semantic Conditional Variational Autoencoder (CoSe-CVAE) network is adept at creating comprehensive contact maps from point clouds, incorporating both spatial and semantic data. We introduce a unique grasp detection technique that efficiently formulates mechanical hand grasp poses from these maps. Additionally, our evaluation model is designed to assess grasp quality and collision probability, significantly improving the practicality of five-fingered hand grasping in complex scenarios. Our data generation method outperforms previous datasets in grasp diversity, scene diversity, modality diversity. Our grasp generation method has demonstrated remarkable success, outperforming established baselines with 81.0% average success rate in real-world single-object grasping and 75.3% success rate in multi-object grasping. The dataset and supplementary materials can be found at https://sites.google.com/view/ffh-clutteredgrasping, and we will release the code upon publication.
4/16/2024