Reconstructing Hand-Held Objects in 3D

0
Sign in to get full access
Overview
- This paper presents a method for reconstructing 3D models of hand-held objects from a single RGB image.
- The proposed approach uses a deep neural network to learn a joint embedding space for hand and object representations, allowing for the simultaneous estimation of the 3D shape and pose of both the hand and the object.
- The method is able to handle a wide range of everyday objects and does not require any object-specific templates or annotations, making it broadly applicable.
Plain English Explanation
The paper describes a way to create 3D models of objects that people are holding in a single photograph. It uses a type of artificial intelligence called a deep neural network to learn how hands and objects interact and appear together. This allows the system to estimate the 3D shape and position of both the hand and the object in the image, without needing any special information about the specific object being held. This makes the approach useful for a wide variety of everyday objects, rather than being limited to a few pre-defined objects.
Technical Explanation
The key innovation of this work is the use of a joint embedding space to represent the hand and object in a unified way. This allows the network to learn the interactions between hands and objects, and to estimate their 3D shapes and poses simultaneously from a single RGB image.
The network is trained on a large dataset of hand-object interactions, without requiring any object-specific templates or annotations. This template-free approach allows the method to be broadly applicable to a wide range of everyday objects, rather than being limited to a predefined set.
Critical Analysis
A key limitation of this work is that it relies on a single RGB image as input, which can make it challenging to handle occlusions or ambiguities. The authors acknowledge this limitation and suggest that future work could explore the use of additional sensor modalities, such as depth information, to improve the reconstruction quality.
Additionally, while the method is able to handle a wide range of objects, it may still struggle with particularly complex or unusual objects that are not well represented in the training data. Expanding the diversity of the training dataset could help address this issue.
Conclusion
Overall, this paper presents a promising approach for reconstructing 3D models of hand-held objects from a single image. By leveraging a joint embedding space to model the interactions between hands and objects, the method is able to estimate the 3D shape and pose of both simultaneously, without the need for object-specific templates or annotations. While there is room for further improvement, this work represents an important step towards more robust and versatile 3D reconstruction of real-world hand-object interactions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Reconstructing Hand-Held Objects in 3D
Jane Wu, Georgios Pavlakos, Georgia Gkioxari, Jitendra Malik
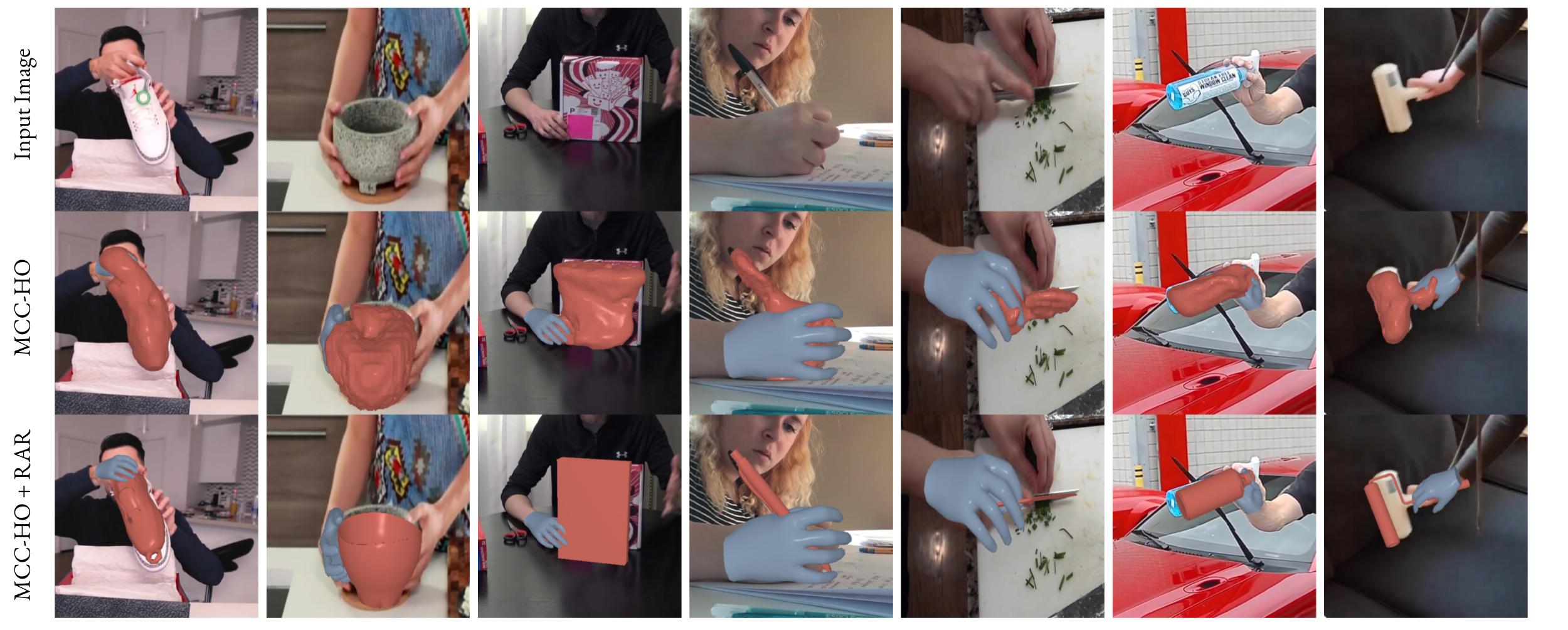
Objects manipulated by the hand (i.e., manipulanda) are particularly challenging to reconstruct from in-the-wild RGB images or videos. Not only does the hand occlude much of the object, but also the object is often only visible in a small number of image pixels. At the same time, two strong anchors emerge in this setting: (1) estimated 3D hands help disambiguate the location and scale of the object, and (2) the set of manipulanda is small relative to all possible objects. With these insights in mind, we present a scalable paradigm for handheld object reconstruction that builds on recent breakthroughs in large language/vision models and 3D object datasets. Our model, MCC-Hand-Object (MCC-HO), jointly reconstructs hand and object geometry given a single RGB image and inferred 3D hand as inputs. Subsequently, we use GPT-4(V) to retrieve a 3D object model that matches the object in the image and rigidly align the model to the network-inferred geometry; we call this alignment Retrieval-Augmented Reconstruction (RAR). Experiments demonstrate that MCC-HO achieves state-of-the-art performance on lab and Internet datasets, and we show how RAR can be used to automatically obtain 3D labels for in-the-wild images of hand-object interactions.
Read more4/11/2024
❗
0
3D Reconstruction of Objects in Hands without Real World 3D Supervision
Aditya Prakash, Matthew Chang, Matthew Jin, Ruisen Tu, Saurabh Gupta
Prior works for reconstructing hand-held objects from a single image train models on images paired with 3D shapes. Such data is challenging to gather in the real world at scale. Consequently, these approaches do not generalize well when presented with novel objects in in-the-wild settings. While 3D supervision is a major bottleneck, there is an abundance of a) in-the-wild raw video data showing hand-object interactions and b) synthetic 3D shape collections. In this paper, we propose modules to leverage 3D supervision from these sources to scale up the learning of models for reconstructing hand-held objects. Specifically, we extract multiview 2D mask supervision from videos and 3D shape priors from shape collections. We use these indirect 3D cues to train occupancy networks that predict the 3D shape of objects from a single RGB image. Our experiments in the challenging object generalization setting on in-the-wild MOW dataset show 11.6% relative improvement over models trained with 3D supervision on existing datasets.
Read more9/24/2024
🖼️
0
3D Hand Mesh Recovery from Monocular RGB in Camera Space
Haonan Li, Patrick P. K. Chen, Yitong Zhou
With the rapid advancement of technologies such as virtual reality, augmented reality, and gesture control, users expect interactions with computer interfaces to be more natural and intuitive. Existing visual algorithms often struggle to accomplish advanced human-computer interaction tasks, necessitating accurate and reliable absolute spatial prediction methods. Moreover, dealing with complex scenes and occlusions in monocular images poses entirely new challenges. This study proposes a network model that performs parallel processing of root-relative grids and root recovery tasks. The model enables the recovery of 3D hand meshes in camera space from monocular RGB images. To facilitate end-to-end training, we utilize an implicit learning approach for 2D heatmaps, enhancing the compatibility of 2D cues across different subtasks. Incorporate the Inception concept into spectral graph convolutional network to explore relative mesh of root, and integrate it with the locally detailed and globally attentive method designed for root recovery exploration. This approach improves the model's predictive performance in complex environments and self-occluded scenes. Through evaluation on the large-scale hand dataset FreiHAND, we have demonstrated that our proposed model is comparable with state-of-the-art models. This study contributes to the advancement of techniques for accurate and reliable absolute spatial prediction in various human-computer interaction applications.
Read more5/14/2024
🤷
0
Sparse multi-view hand-object reconstruction for unseen environments
Yik Lung Pang, Changjae Oh, Andrea Cavallaro
Recent works in hand-object reconstruction mainly focus on the single-view and dense multi-view settings. On the one hand, single-view methods can leverage learned shape priors to generalise to unseen objects but are prone to inaccuracies due to occlusions. On the other hand, dense multi-view methods are very accurate but cannot easily adapt to unseen objects without further data collection. In contrast, sparse multi-view methods can take advantage of the additional views to tackle occlusion, while keeping the computational cost low compared to dense multi-view methods. In this paper, we consider the problem of hand-object reconstruction with unseen objects in the sparse multi-view setting. Given multiple RGB images of the hand and object captured at the same time, our model SVHO combines the predictions from each view into a unified reconstruction without optimisation across views. We train our model on a synthetic hand-object dataset and evaluate directly on a real world recorded hand-object dataset with unseen objects. We show that while reconstruction of unseen hands and objects from RGB is challenging, additional views can help improve the reconstruction quality.
Read more5/3/2024