GEVO: Memory-Efficient Monocular Visual Odometry Using Gaussians

0

Sign in to get full access
Overview
- GEVO is a memory-efficient monocular visual odometry system that uses Gaussian distributions to represent the environment
- It aims to provide accurate and real-time ego-motion estimation using a single camera
- The key innovation is the use of Gaussian distributions to compactly represent the environment, reducing memory requirements compared to traditional approaches
Plain English Explanation
GEVO is a new system for tracking the motion of a camera as it moves through an environment using only a single camera. Unlike other visual odometry approaches that use 3D point clouds or other complex representations, GEVO represents the environment using simple Gaussian distributions.
The key idea behind GEVO is that rather than storing a detailed 3D model of the environment, it uses Gaussian distributions to capture the general shape and location of objects. This allows GEVO to maintain an internal map of the surroundings using much less memory than other methods. At the same time, the Gaussian representation is still detailed enough for GEVO to accurately estimate the camera's motion as it moves.
By using this more efficient environmental representation, GEVO is able to run in real-time on a single camera, making it useful for applications like robotics or augmented reality where fast, memory-constrained motion tracking is needed.
Technical Explanation
GEVO is a monocular visual odometry system that represents the environment using Gaussian distributions. Unlike traditional approaches that use 3D point clouds or meshes, GEVO models the environment as a collection of Gaussian blobs.
The key components of GEVO are:
- Gaussian Representation: GEVO maintains a map of the environment as a set of Gaussian distributions, each representing the location and shape of an object or surface. This compact representation requires less memory than storing a detailed 3D model.
- Keyframe-based Tracking: GEVO selects a sparse set of "keyframes" from the video stream and performs visual odometry by aligning the current frame to these keyframes using the Gaussian map.
- Gaussian Splatting: To efficiently compare the current frame to the Gaussian map, GEVO uses a technique called "Gaussian splatting" to project the 3D Gaussian blobs onto the 2D image plane.
The combination of the Gaussian environment representation and the keyframe-based tracking allows GEVO to provide accurate ego-motion estimation while using significantly less memory than traditional visual odometry approaches. This makes GEVO well-suited for memory-constrained applications like mobile robotics or augmented reality.
Critical Analysis
The GEVO paper presents a promising approach to monocular visual odometry, but there are a few potential limitations and areas for further research:
- Evaluation on Challenging Datasets: The paper evaluates GEVO primarily on the KITTI dataset, which represents driving scenarios on relatively structured urban roads. It would be valuable to assess GEVO's performance on more diverse and challenging environments, such as indoor scenes or highly cluttered outdoor areas.
- Handling Dynamic Environments: The current GEVO system assumes a static environment, which may not hold true in many real-world scenarios. Extending GEVO to handle dynamic objects and adapt its Gaussian map accordingly could improve its robustness.
- Integrating with Other Sensors: While GEVO uses only a monocular camera, combining it with other sensors like IMUs or depth cameras could further improve the accuracy and reliability of the ego-motion estimation.
- Computational Efficiency: The paper reports that GEVO can run in real-time, but a more detailed analysis of its computational requirements and potential for optimization would be helpful to assess its suitability for resource-constrained platforms.
Overall, the GEVO system presents an interesting and promising direction for memory-efficient visual odometry, but further research and evaluation would be valuable to fully understand its capabilities and limitations.
Conclusion
GEVO is a novel monocular visual odometry system that uses a compact Gaussian representation of the environment to enable accurate and real-time ego-motion estimation with low memory requirements. By modeling the surroundings as a set of Gaussian blobs rather than a detailed 3D map, GEVO is able to track camera motion effectively while using significantly less memory than traditional approaches.
This memory-efficient design makes GEVO well-suited for applications where computational and storage resources are limited, such as mobile robotics or augmented reality. While the current evaluation shows promising results, further research is needed to assess GEVO's performance in more diverse environments and its ability to handle dynamic scenes.
Overall, the GEVO system represents an interesting and innovative approach to the challenging problem of monocular visual odometry, with the potential to enable new applications by overcoming the memory constraints of existing solutions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!GEVO: Memory-Efficient Monocular Visual Odometry Using Gaussians
Dasong Gao, Peter Zhi Xuan Li, Vivienne Sze, Sertac Karaman
Constructing a high-fidelity representation of the 3D scene using a monocular camera can enable a wide range of applications on mobile devices, such as micro-robots, smartphones, and AR/VR headsets. On these devices, memory is often limited in capacity and its access often dominates the consumption of compute energy. Although Gaussian Splatting (GS) allows for high-fidelity reconstruction of 3D scenes, current GS-based SLAM is not memory efficient as a large number of past images is stored to retrain Gaussians for reducing catastrophic forgetting. These images often require two-orders-of-magnitude higher memory than the map itself and thus dominate the total memory usage. In this work, we present GEVO, a GS-based monocular SLAM framework that achieves comparable fidelity as prior methods by rendering (instead of storing) them from the existing map. Novel Gaussian initialization and optimization techniques are proposed to remove artifacts from the map and delay the degradation of the rendered images over time. Across a variety of environments, GEVO achieves comparable map fidelity while reducing the memory overhead to around 58 MBs, which is up to 94x lower than prior works.
Read more9/17/2024
0
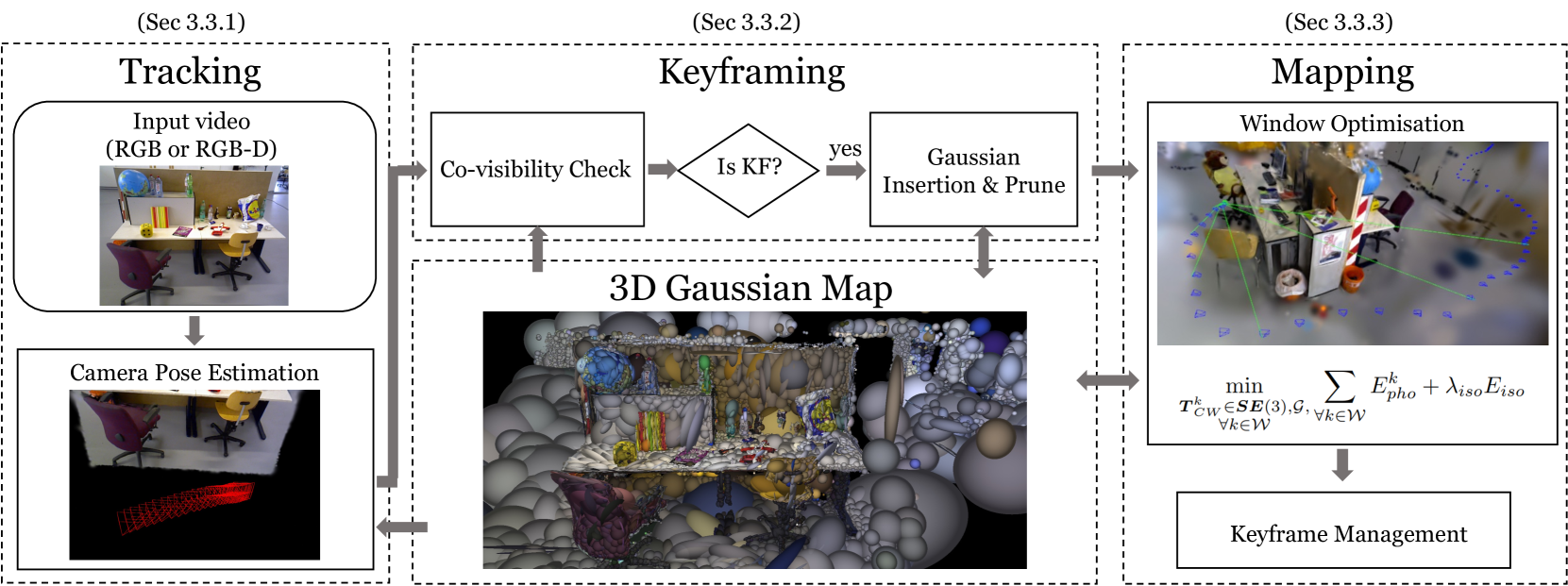
Gaussian Splatting SLAM
Hidenobu Matsuki, Riku Murai, Paul H. J. Kelly, Andrew J. Davison
We present the first application of 3D Gaussian Splatting in monocular SLAM, the most fundamental but the hardest setup for Visual SLAM. Our method, which runs live at 3fps, utilises Gaussians as the only 3D representation, unifying the required representation for accurate, efficient tracking, mapping, and high-quality rendering. Designed for challenging monocular settings, our approach is seamlessly extendable to RGB-D SLAM when an external depth sensor is available. Several innovations are required to continuously reconstruct 3D scenes with high fidelity from a live camera. First, to move beyond the original 3DGS algorithm, which requires accurate poses from an offline Structure from Motion (SfM) system, we formulate camera tracking for 3DGS using direct optimisation against the 3D Gaussians, and show that this enables fast and robust tracking with a wide basin of convergence. Second, by utilising the explicit nature of the Gaussians, we introduce geometric verification and regularisation to handle the ambiguities occurring in incremental 3D dense reconstruction. Finally, we introduce a full SLAM system which not only achieves state-of-the-art results in novel view synthesis and trajectory estimation but also reconstruction of tiny and even transparent objects.
Read more4/16/2024

0
Towards Real-Time Gaussian Splatting: Accelerating 3DGS through Photometric SLAM
Yan Song Hu, Dayou Mao, Yuhao Chen, John Zelek
Initial applications of 3D Gaussian Splatting (3DGS) in Visual Simultaneous Localization and Mapping (VSLAM) demonstrate the generation of high-quality volumetric reconstructions from monocular video streams. However, despite these promising advancements, current 3DGS integrations have reduced tracking performance and lower operating speeds compared to traditional VSLAM. To address these issues, we propose integrating 3DGS with Direct Sparse Odometry, a monocular photometric SLAM system. We have done preliminary experiments showing that using Direct Sparse Odometry point cloud outputs, as opposed to standard structure-from-motion methods, significantly shortens the training time needed to achieve high-quality renders. Reducing 3DGS training time enables the development of 3DGS-integrated SLAM systems that operate in real-time on mobile hardware. These promising initial findings suggest further exploration is warranted in combining traditional VSLAM systems with 3DGS.
Read more8/9/2024
0
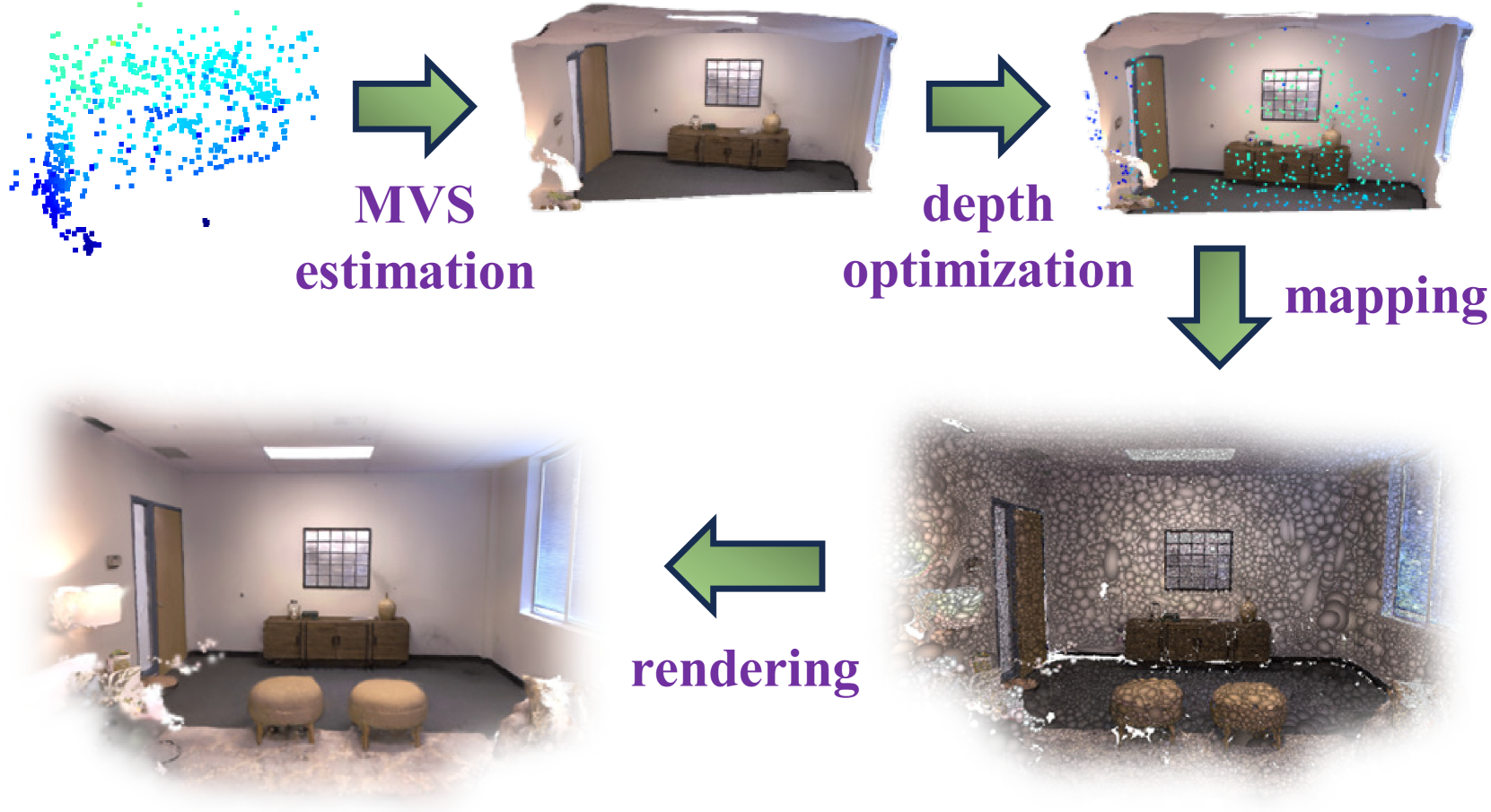
MGS-SLAM: Monocular Sparse Tracking and Gaussian Mapping with Depth Smooth Regularization
Pengcheng Zhu, Yaoming Zhuang, Baoquan Chen, Li Li, Chengdong Wu, Zhanlin Liu
This letter introduces a novel framework for dense Visual Simultaneous Localization and Mapping (VSLAM) based on Gaussian Splatting. Recently, SLAM based on Gaussian Splatting has shown promising results. However, in monocular scenarios, the Gaussian maps reconstructed lack geometric accuracy and exhibit weaker tracking capability. To address these limitations, we jointly optimize sparse visual odometry tracking and 3D Gaussian Splatting scene representation for the first time. We obtain depth maps on visual odometry keyframe windows using a fast Multi-View Stereo (MVS) network for the geometric supervision of Gaussian maps. Furthermore, we propose a depth smooth loss and Sparse-Dense Adjustment Ring (SDAR) to reduce the negative effect of estimated depth maps and preserve the consistency in scale between the visual odometry and Gaussian maps. We have evaluated our system across various synthetic and real-world datasets. The accuracy of our pose estimation surpasses existing methods and achieves state-of-the-art. Additionally, it outperforms previous monocular methods in terms of novel view synthesis and geometric reconstruction fidelities.
Read more9/11/2024