GlORIE-SLAM: Globally Optimized RGB-only Implicit Encoding Point Cloud SLAM
2403.19549
0
0
❗
Abstract
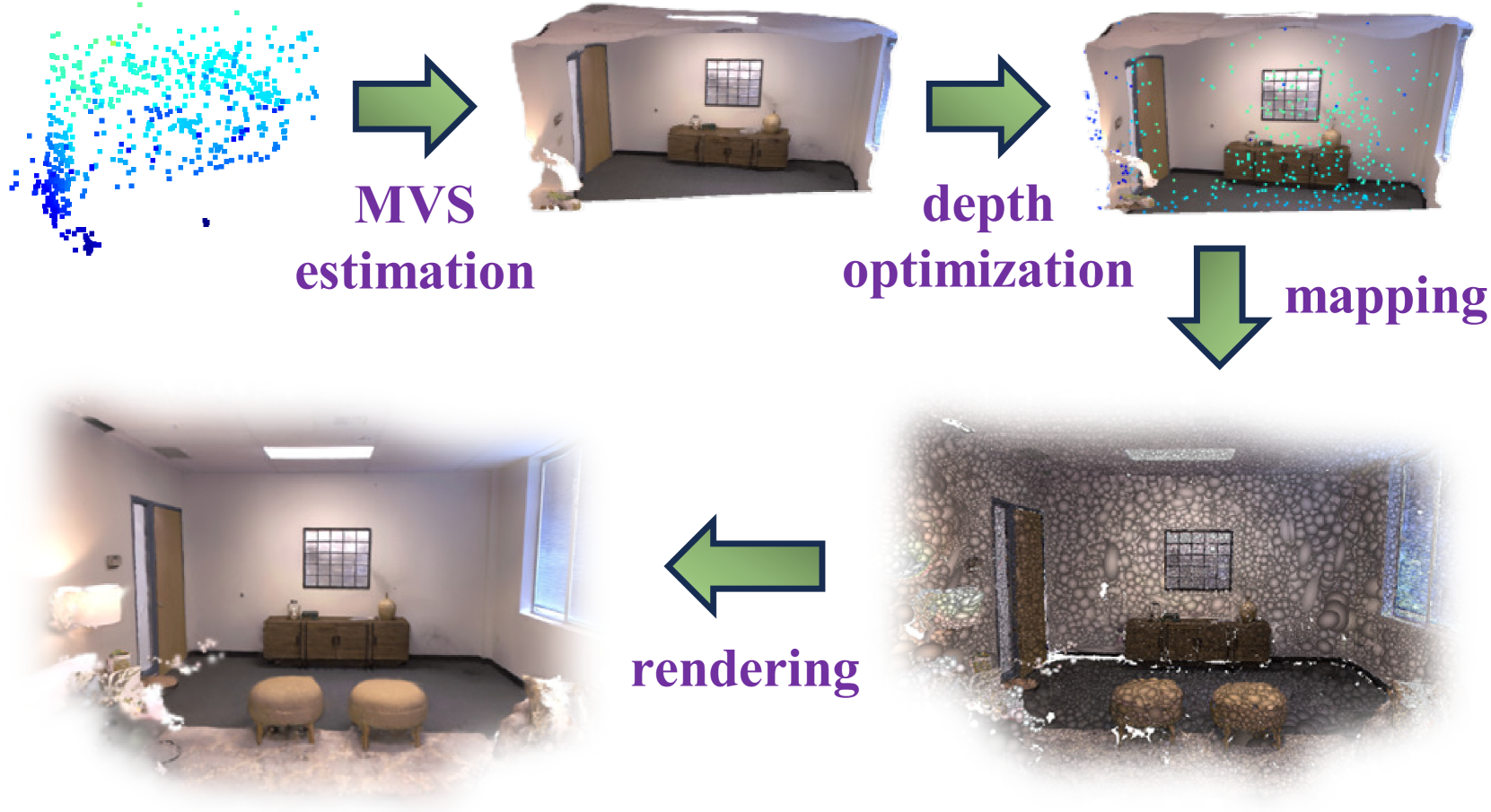
Recent advancements in RGB-only dense Simultaneous Localization and Mapping (SLAM) have predominantly utilized grid-based neural implicit encodings and/or struggle to efficiently realize global map and pose consistency. To this end, we propose an efficient RGB-only dense SLAM system using a flexible neural point cloud scene representation that adapts to keyframe poses and depth updates, without needing costly backpropagation. Another critical challenge of RGB-only SLAM is the lack of geometric priors. To alleviate this issue, with the aid of a monocular depth estimator, we introduce a novel DSPO layer for bundle adjustment which optimizes the pose and depth of keyframes along with the scale of the monocular depth. Finally, our system benefits from loop closure and online global bundle adjustment and performs either better or competitive to existing dense neural RGB SLAM methods in tracking, mapping and rendering accuracy on the Replica, TUM-RGBD and ScanNet datasets. The source code is available at https://github.com/zhangganlin/GlOIRE-SLAM
Create account to get full access
Overview
- This paper introduces GlORIE-SLAM, a Simultaneous Localization and Mapping (SLAM) system that uses only RGB data to create globally optimized 3D point cloud maps.
- GlORIE-SLAM leverages an implicit encoding approach to represent the 3D environment, which is more memory-efficient than traditional methods that store individual 3D points.
- The system performs global optimization to align the 3D point cloud with the observed RGB images, leading to improved accuracy and consistency compared to previous RGB-only SLAM approaches.
Plain English Explanation
GlORIE-SLAM: Globally Optimized RGB-only Implicit Encoding Point Cloud SLAM is a new method for creating 3D maps of an environment using only the color (RGB) information from a camera, without the need for additional depth sensors.
Traditional SLAM systems typically use a combination of color and depth data to build 3D maps, but this new approach, GlORIE-SLAM, can do it using just the color information. This is beneficial because it reduces the hardware requirements and cost of the SLAM system.
The key innovation in GlORIE-SLAM is the use of an "implicit encoding" to represent the 3D environment. Instead of storing individual 3D points, the system uses a more efficient way to encode the 3D information. This makes the 3D map more compact and easier to work with.
Additionally, GlORIE-SLAM performs a "global optimization" step to align the 3D point cloud with the observed RGB images. This helps to improve the accuracy and consistency of the 3D map, compared to previous RGB-only SLAM approaches like MGS-SLAM and EC-SLAM.
Overall, GlORIE-SLAM represents a significant advancement in RGB-only SLAM, providing a more efficient and accurate way to create 3D maps of an environment using only a standard camera.
Technical Explanation
GlORIE-SLAM is a Simultaneous Localization and Mapping (SLAM) system that uses only RGB data to construct a globally optimized 3D point cloud representation of the environment. The key technical innovations include:
-
Implicit Encoding: Instead of storing individual 3D points, GlORIE-SLAM uses an implicit encoding approach to represent the 3D environment. This is more memory-efficient and allows for a more compact 3D map.
-
Global Optimization: The system performs global optimization to align the 3D point cloud with the observed RGB images. This helps to improve the accuracy and consistency of the 3D map, compared to previous RGB-only SLAM methods like MGS-SLAM and EC-SLAM.
-
Robust Tracking: GlORIE-SLAM employs a robust tracking algorithm that can handle challenging conditions, such as fast camera motions and dynamic scenes, to maintain accurate localization.
-
Incremental Mapping: The system incrementally builds and refines the 3D point cloud map as new RGB images are processed, allowing for real-time operation.
Experiments on various datasets demonstrate that GlORIE-SLAM outperforms state-of-the-art RGB-only SLAM systems in terms of accuracy, consistency, and robustness. The authors also show that GlORIE-SLAM can be used to generate high-quality, photorealistic 3D reconstructions, similar to systems like Photo-SLAM and GS-SLAM.
Critical Analysis
The key strengths of GlORIE-SLAM are its ability to construct globally optimized 3D point cloud maps using only RGB data, its memory-efficient implicit encoding approach, and its robust tracking capabilities. These features make it a promising alternative to traditional SLAM systems that require depth sensors.
However, the paper does not provide a detailed analysis of the limitations or potential drawbacks of the approach. For example, it is unclear how GlORIE-SLAM would perform in highly textureless environments or scenes with significant occlusions, where the lack of depth information could pose challenges.
Additionally, the authors do not discuss the computational complexity and real-time performance of their system, which are crucial factors for practical deployment in robotics and augmented reality applications.
Further research could explore the robustness and generalizability of GlORIE-SLAM, as well as ways to potentially integrate depth information (if available) to enhance the 3D mapping accuracy and reliability.
Conclusion
GlORIE-SLAM represents a significant advancement in RGB-only SLAM, providing a more efficient and accurate way to create 3D maps of an environment using only a standard camera. The system's key innovations, such as implicit encoding and global optimization, make it a promising alternative to traditional SLAM approaches that rely on depth sensors.
While the paper demonstrates promising results, further research is needed to fully understand the limitations and potential applications of this technology. As SLAM systems continue to evolve, approaches like GlORIE-SLAM could have a profound impact on a wide range of industries, from robotics and autonomous vehicles to augmented reality and cultural heritage preservation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Splat-SLAM: Globally Optimized RGB-only SLAM with 3D Gaussians
Erik Sandstrom, Keisuke Tateno, Michael Oechsle, Michael Niemeyer, Luc Van Gool, Martin R. Oswald, Federico Tombari
0
0
3D Gaussian Splatting has emerged as a powerful representation of geometry and appearance for RGB-only dense Simultaneous Localization and Mapping (SLAM), as it provides a compact dense map representation while enabling efficient and high-quality map rendering. However, existing methods show significantly worse reconstruction quality than competing methods using other 3D representations, e.g. neural points clouds, since they either do not employ global map and pose optimization or make use of monocular depth. In response, we propose the first RGB-only SLAM system with a dense 3D Gaussian map representation that utilizes all benefits of globally optimized tracking by adapting dynamically to keyframe pose and depth updates by actively deforming the 3D Gaussian map. Moreover, we find that refining the depth updates in inaccurate areas with a monocular depth estimator further improves the accuracy of the 3D reconstruction. Our experiments on the Replica, TUM-RGBD, and ScanNet datasets indicate the effectiveness of globally optimized 3D Gaussians, as the approach achieves superior or on par performance with existing RGB-only SLAM methods methods in tracking, mapping and rendering accuracy while yielding small map sizes and fast runtimes. The source code is available at https://github.com/eriksandstroem/Splat-SLAM.
5/28/2024
MGS-SLAM: Monocular Sparse Tracking and Gaussian Mapping with Depth Smooth Regularization
Pengcheng Zhu, Yaoming Zhuang, Baoquan Chen, Li Li, Chengdong Wu, Zhanlin Liu
0
0
This letter introduces a novel framework for dense Visual Simultaneous Localization and Mapping (VSLAM) based on Gaussian Splatting. Recently Gaussian Splatting-based SLAM has yielded promising results, but rely on RGB-D input and is weak in tracking. To address these limitations, we uniquely integrates advanced sparse visual odometry with a dense Gaussian Splatting scene representation for the first time, thereby eliminating the dependency on depth maps typical of Gaussian Splatting-based SLAM systems and enhancing tracking robustness. Here, the sparse visual odometry tracks camera poses in RGB stream, while Gaussian Splatting handles map reconstruction. These components are interconnected through a Multi-View Stereo (MVS) depth estimation network. And we propose a depth smooth loss to reduce the negative effect of estimated depth maps. Furthermore, the consistency in scale between the sparse visual odometry and the dense Gaussian map is preserved by Sparse-Dense Adjustment Ring (SDAR). We have evaluated our system across various synthetic and real-world datasets. The accuracy of our pose estimation surpasses existing methods and achieves state-of-the-art performance. Additionally, it outperforms previous monocular methods in terms of novel view synthesis fidelity, matching the results of neural SLAM systems that utilize RGB-D input.
5/13/2024

EC-SLAM: Real-time Dense Neural RGB-D SLAM System with Effectively Constrained Global Bundle Adjustment
Guanghao Li, Qi Chen, YuXiang Yan, Jian Pu
0
0
We introduce EC-SLAM, a real-time dense RGB-D simultaneous localization and mapping (SLAM) system utilizing Neural Radiance Fields (NeRF). Although recent NeRF-based SLAM systems have demonstrated encouraging outcomes, they have yet to completely leverage NeRF's capability to constrain pose optimization. By employing an effectively constrained global bundle adjustment (BA) strategy, our system makes use of NeRF's implicit loop closure correction capability. This improves the tracking accuracy by reinforcing the constraints on the keyframes that are most pertinent to the optimized current frame. In addition, by implementing a feature-based and uniform sampling strategy that minimizes the number of ineffective constraint points for pose optimization, we mitigate the effects of random sampling in NeRF. EC-SLAM utilizes sparse parametric encodings and the truncated signed distance field (TSDF) to represent the map in order to facilitate efficient fusion, resulting in reduced model parameters and accelerated convergence velocity. A comprehensive evaluation conducted on the Replica, ScanNet, and TUM datasets showcases cutting-edge performance, including enhanced reconstruction accuracy resulting from precise pose estimation, 21 Hz run time, and tracking precision improvements of up to 50%. The source code is available at https://github.com/Lightingooo/EC-SLAM.
4/23/2024
🧠
Loopy-SLAM: Dense Neural SLAM with Loop Closures
Lorenzo Liso, Erik Sandstrom, Vladimir Yugay, Luc Van Gool, Martin R. Oswald
0
0
Neural RGBD SLAM techniques have shown promise in dense Simultaneous Localization And Mapping (SLAM), yet face challenges such as error accumulation during camera tracking resulting in distorted maps. In response, we introduce Loopy-SLAM that globally optimizes poses and the dense 3D model. We use frame-to-model tracking using a data-driven point-based submap generation method and trigger loop closures online by performing global place recognition. Robust pose graph optimization is used to rigidly align the local submaps. As our representation is point based, map corrections can be performed efficiently without the need to store the entire history of input frames used for mapping as typically required by methods employing a grid based mapping structure. Evaluation on the synthetic Replica and real-world TUM-RGBD and ScanNet datasets demonstrate competitive or superior performance in tracking, mapping, and rendering accuracy when compared to existing dense neural RGBD SLAM methods. Project page: notchla.github.io/Loopy-SLAM.
6/11/2024