EC-SLAM: Real-time Dense Neural RGB-D SLAM System with Effectively Constrained Global Bundle Adjustment
2404.13346
0
0

Abstract
We introduce EC-SLAM, a real-time dense RGB-D simultaneous localization and mapping (SLAM) system utilizing Neural Radiance Fields (NeRF). Although recent NeRF-based SLAM systems have demonstrated encouraging outcomes, they have yet to completely leverage NeRF's capability to constrain pose optimization. By employing an effectively constrained global bundle adjustment (BA) strategy, our system makes use of NeRF's implicit loop closure correction capability. This improves the tracking accuracy by reinforcing the constraints on the keyframes that are most pertinent to the optimized current frame. In addition, by implementing a feature-based and uniform sampling strategy that minimizes the number of ineffective constraint points for pose optimization, we mitigate the effects of random sampling in NeRF. EC-SLAM utilizes sparse parametric encodings and the truncated signed distance field (TSDF) to represent the map in order to facilitate efficient fusion, resulting in reduced model parameters and accelerated convergence velocity. A comprehensive evaluation conducted on the Replica, ScanNet, and TUM datasets showcases cutting-edge performance, including enhanced reconstruction accuracy resulting from precise pose estimation, 21 Hz run time, and tracking precision improvements of up to 50%. The source code is available at https://github.com/Lightingooo/EC-SLAM.
Create account to get full access
Overview
- Presents a real-time dense neural RGB-D SLAM system called EC-SLAM that effectively constrains global bundle adjustment
- Combines neural rendering and simultaneous localization and mapping (SLAM) techniques to create a robust and efficient 3D mapping solution
- Leverages effectively constrained global bundle adjustment to improve the accuracy and stability of the SLAM system
Plain English Explanation
This paper introduces a new system called EC-SLAM that combines neural rendering and SLAM techniques to create a real-time, dense 3D mapping solution. The key innovation is the use of an "effectively constrained global bundle adjustment" algorithm, which helps improve the accuracy and stability of the SLAM system.
In simple terms, the system takes in color (RGB) and depth (D) images from a camera and uses machine learning models to build an accurate 3D map of the environment. The global bundle adjustment technique helps ensure that the 3D reconstruction is consistent and minimizes errors that can accumulate over time.
By integrating neural rendering approaches, the system is able to create high-quality, photorealistic 3D maps in real-time. This has important applications in areas like augmented reality, robotics, and autonomous navigation, where having an accurate, detailed 3D model of the environment is crucial.
Technical Explanation
The EC-SLAM system builds on prior work in neural SLAM and neural rendering techniques. It consists of several key components:
- A dense neural RGB-D SLAM module that tracks the camera pose and builds a 3D map of the environment in real-time.
- A neural rendering module that generates photorealistic views of the 3D scene from novel viewpoints.
- An effectively constrained global bundle adjustment algorithm that optimizes the 3D map and camera poses to improve accuracy and stability.
The authors demonstrate the effectiveness of EC-SLAM through extensive experiments on popular benchmark datasets. They show that it outperforms state-of-the-art SLAM systems in terms of mapping accuracy, robustness, and computational efficiency.
Critical Analysis
The paper provides a comprehensive and well-designed solution for real-time, dense 3D mapping using neural techniques. The authors have carefully addressed key challenges in SLAM systems, such as drift and loop closure, through the use of their effectively constrained global bundle adjustment algorithm.
However, the paper does not discuss the potential limitations of the system, such as its performance in dynamic environments or its sensitivity to sensor noise or calibration errors. Additionally, the computational requirements of the neural rendering and bundle adjustment components may limit the system's applicability on resource-constrained platforms, such as embedded devices.
Further research could explore ways to optimize the system's efficiency, perhaps through the use of more lightweight neural architectures or hardware acceleration. Investigating the system's robustness to real-world conditions and its generalization to different environments would also be valuable.
Conclusion
The EC-SLAM system presented in this paper represents an important step forward in the field of real-time, dense 3D mapping. By combining neural rendering and SLAM techniques, the authors have created a robust and efficient solution with applications in areas like augmented reality, robotics, and autonomous navigation.
The key innovation of the effectively constrained global bundle adjustment algorithm helps improve the accuracy and stability of the 3D reconstruction, addressing a critical challenge in SLAM systems. While the system has some limitations, the overall approach and insights presented in the paper have the potential to significantly advance the state of the art in 3D mapping and visual understanding.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
New!RoDyn-SLAM: Robust Dynamic Dense RGB-D SLAM with Neural Radiance Fields
Haochen Jiang, Yueming Xu, Kejie Li, Jianfeng Feng, Li Zhang
0
0
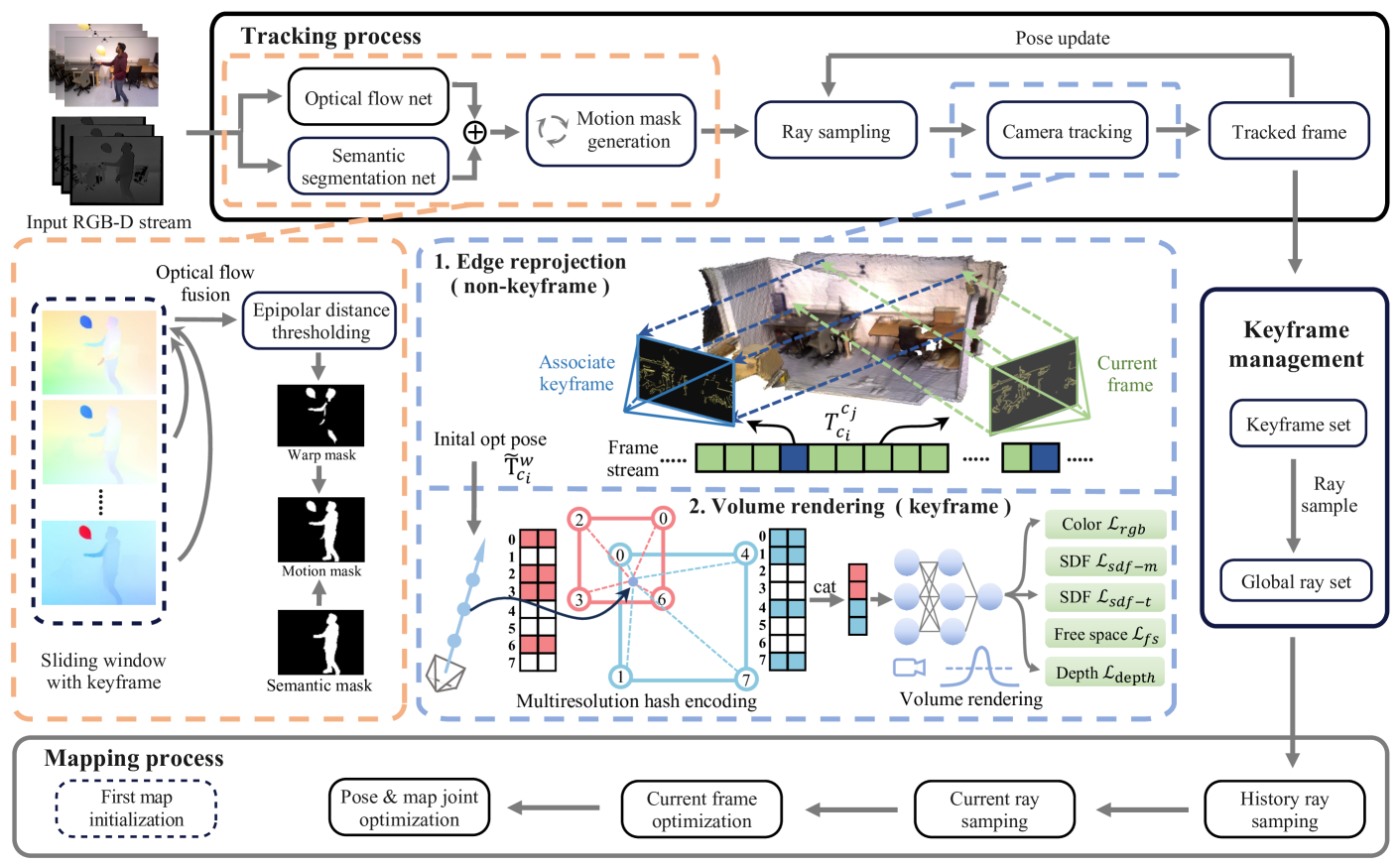
Leveraging neural implicit representation to conduct dense RGB-D SLAM has been studied in recent years. However, this approach relies on a static environment assumption and does not work robustly within a dynamic environment due to the inconsistent observation of geometry and photometry. To address the challenges presented in dynamic environments, we propose a novel dynamic SLAM framework with neural radiance field. Specifically, we introduce a motion mask generation method to filter out the invalid sampled rays. This design effectively fuses the optical flow mask and semantic mask to enhance the precision of motion mask. To further improve the accuracy of pose estimation, we have designed a divide-and-conquer pose optimization algorithm that distinguishes between keyframes and non-keyframes. The proposed edge warp loss can effectively enhance the geometry constraints between adjacent frames. Extensive experiments are conducted on the two challenging datasets, and the results show that RoDyn-SLAM achieves state-of-the-art performance among recent neural RGB-D methods in both accuracy and robustness.
7/2/2024
❗
GlORIE-SLAM: Globally Optimized RGB-only Implicit Encoding Point Cloud SLAM
Ganlin Zhang, Erik Sandstrom, Youmin Zhang, Manthan Patel, Luc Van Gool, Martin R. Oswald
0
0
Recent advancements in RGB-only dense Simultaneous Localization and Mapping (SLAM) have predominantly utilized grid-based neural implicit encodings and/or struggle to efficiently realize global map and pose consistency. To this end, we propose an efficient RGB-only dense SLAM system using a flexible neural point cloud scene representation that adapts to keyframe poses and depth updates, without needing costly backpropagation. Another critical challenge of RGB-only SLAM is the lack of geometric priors. To alleviate this issue, with the aid of a monocular depth estimator, we introduce a novel DSPO layer for bundle adjustment which optimizes the pose and depth of keyframes along with the scale of the monocular depth. Finally, our system benefits from loop closure and online global bundle adjustment and performs either better or competitive to existing dense neural RGB SLAM methods in tracking, mapping and rendering accuracy on the Replica, TUM-RGBD and ScanNet datasets. The source code is available at https://github.com/zhangganlin/GlOIRE-SLAM
5/28/2024

NeSLAM: Neural Implicit Mapping and Self-Supervised Feature Tracking With Depth Completion and Denoising
Tianchen Deng, Yanbo Wang, Hongle Xie, Hesheng Wang, Jingchuan Wang, Danwei Wang, Weidong Chen
0
0
In recent years, there have been significant advancements in 3D reconstruction and dense RGB-D SLAM systems. One notable development is the application of Neural Radiance Fields (NeRF) in these systems, which utilizes implicit neural representation to encode 3D scenes. This extension of NeRF to SLAM has shown promising results. However, the depth images obtained from consumer-grade RGB-D sensors are often sparse and noisy, which poses significant challenges for 3D reconstruction and affects the accuracy of the representation of the scene geometry. Moreover, the original hierarchical feature grid with occupancy value is inaccurate for scene geometry representation. Furthermore, the existing methods select random pixels for camera tracking, which leads to inaccurate localization and is not robust in real-world indoor environments. To this end, we present NeSLAM, an advanced framework that achieves accurate and dense depth estimation, robust camera tracking, and realistic synthesis of novel views. First, a depth completion and denoising network is designed to provide dense geometry prior and guide the neural implicit representation optimization. Second, the occupancy scene representation is replaced with Signed Distance Field (SDF) hierarchical scene representation for high-quality reconstruction and view synthesis. Furthermore, we also propose a NeRF-based self-supervised feature tracking algorithm for robust real-time tracking. Experiments on various indoor datasets demonstrate the effectiveness and accuracy of the system in reconstruction, tracking quality, and novel view synthesis.
4/1/2024

Photo-SLAM: Real-time Simultaneous Localization and Photorealistic Mapping for Monocular, Stereo, and RGB-D Cameras
Huajian Huang, Longwei Li, Hui Cheng, Sai-Kit Yeung
0
0
The integration of neural rendering and the SLAM system recently showed promising results in joint localization and photorealistic view reconstruction. However, existing methods, fully relying on implicit representations, are so resource-hungry that they cannot run on portable devices, which deviates from the original intention of SLAM. In this paper, we present Photo-SLAM, a novel SLAM framework with a hyper primitives map. Specifically, we simultaneously exploit explicit geometric features for localization and learn implicit photometric features to represent the texture information of the observed environment. In addition to actively densifying hyper primitives based on geometric features, we further introduce a Gaussian-Pyramid-based training method to progressively learn multi-level features, enhancing photorealistic mapping performance. The extensive experiments with monocular, stereo, and RGB-D datasets prove that our proposed system Photo-SLAM significantly outperforms current state-of-the-art SLAM systems for online photorealistic mapping, e.g., PSNR is 30% higher and rendering speed is hundreds of times faster in the Replica dataset. Moreover, the Photo-SLAM can run at real-time speed using an embedded platform such as Jetson AGX Orin, showing the potential of robotics applications.
4/9/2024