GRASP: A Rehearsal Policy for Efficient Online Continual Learning
2308.13646
0
0
🌿
Abstract
Continual learning (CL) in deep neural networks (DNNs) involves incrementally accumulating knowledge in a DNN from a growing data stream. A major challenge in CL is that non-stationary data streams cause catastrophic forgetting of previously learned abilities. A popular solution is rehearsal: storing past observations in a buffer and then sampling the buffer to update the DNN. Uniform sampling in a class-balanced manner is highly effective, and better sample selection policies have been elusive. Here, we propose a new sample selection policy called GRASP that selects the most prototypical (easy) samples first and then gradually selects less prototypical (harder) examples. GRASP has little additional compute or memory overhead compared to uniform selection, enabling it to scale to large datasets. Compared to 17 other rehearsal policies, GRASP achieves higher accuracy in CL experiments on ImageNet. Compared to uniform balanced sampling, GRASP achieves the same performance with 40% fewer updates. We also show that GRASP is effective for CL on five text classification datasets.
Create account to get full access
Overview
- Continual learning (CL) in deep neural networks (DNNs) involves incrementally learning from a growing data stream
- A major challenge is catastrophic forgetting, where the DNN forgets previously learned abilities
- Rehearsal, which involves storing past observations and sampling them to update the DNN, is a popular solution
- Uniform sampling in a class-balanced manner is highly effective, but better sample selection policies have been elusive
- This paper proposes a new sample selection policy called GRASP that selects the most prototypical (easy) samples first and then gradually selects less prototypical (harder) examples
Plain English Explanation
Deep neural networks (DNNs) can be used for continual learning (CL), which involves building up knowledge over time from a constantly growing set of data. A major challenge with CL is that as the DNN learns new information, it can forget what it previously learned, a phenomenon known as catastrophic forgetting.
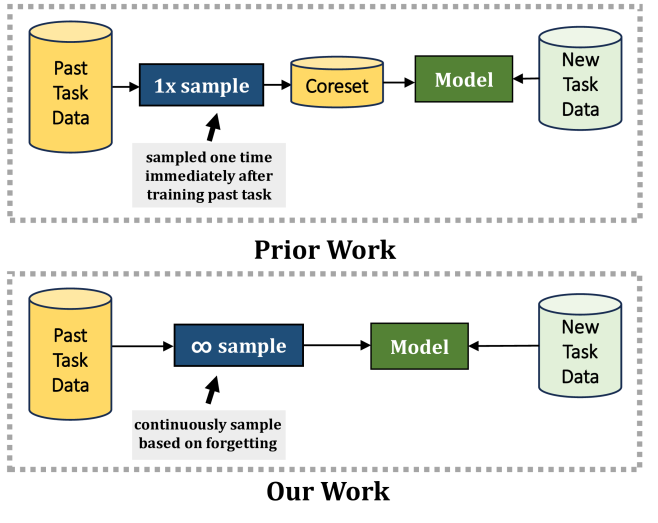
One way to address this is through a technique called rehearsal, where the DNN stores some of the past data it has seen and then regularly revisits and learns from that stored data along with new data. A common approach is to uniformly sample from the stored data in a way that balances the different classes. This has been shown to be effective, but the authors of this paper wanted to explore whether there might be even better ways to select which stored samples to use for updating the DNN.
The paper introduces a new sample selection policy called GRASP, which first selects the most "prototypical" or easiest samples from the stored data, and then gradually selects samples that are less prototypical or more challenging. The key idea is that by focusing on the easiest examples first, the DNN can build a solid foundation of knowledge that makes it better able to learn the more complex examples later on.
Importantly, GRASP does not require much additional computation or memory compared to the standard uniform sampling approach, which allows it to scale to large datasets. The paper shows that GRASP outperforms a wide range of other sample selection policies for CL on the ImageNet dataset, and also works well for text classification tasks.
Technical Explanation
The authors propose a new rehearsal-based sample selection policy called GRASP (GRadient-weighted Adversarial Sample Prioritization) for continual learning in deep neural networks. In rehearsal-based CL, the model stores a buffer of past observations and selects samples from this buffer to update the model and prevent catastrophic forgetting.
GRASP first selects the most "prototypical" or representative samples from the buffer, which tend to be easy examples, and then gradually selects less prototypical, harder examples. This is done by computing a gradient-weighted adversarial sample score for each example in the buffer, which measures how much influence that sample has on updating the model parameters. Samples with higher scores are selected first.
The authors evaluate GRASP against 17 other rehearsal-based sample selection policies on CL experiments using the ImageNet dataset. GRASP achieves higher overall accuracy compared to these other methods. Furthermore, GRASP can achieve the same performance as uniform balanced sampling while requiring 40% fewer updates, demonstrating its sample efficiency.
The authors also demonstrate the effectiveness of GRASP on five text classification datasets, showing its versatility beyond just computer vision tasks. Compared to uniform sampling, GRASP was able to achieve similar performance with fewer updates, indicating its potential to improve sample efficiency in continual learning scenarios.
Critical Analysis
The GRASP sample selection policy proposed in this paper represents an interesting and promising advancement in continual learning techniques. By prioritizing the most prototypical or representative samples during rehearsal, GRASP appears to help the model build a strong foundational knowledge that allows it to more effectively learn new information without catastrophically forgetting the old.
That said, the paper does not provide a deep exploration of the underlying mechanisms and reasons why this approach is effective. The authors suggest it may help the model learn a more robust feature representation, but more analysis would be helpful to fully understand the benefits of the GRASP method.
Additionally, while the performance improvements over other rehearsal policies are noteworthy, the experiments are limited to relatively narrow datasets and tasks. Further testing on a wider variety of continual learning benchmarks would help validate the generalizability of GRASP.
It would also be interesting to see how GRASP compares to other advanced continual learning techniques beyond just rehearsal, such asadaptive memory replay, brain-inspired feature distillation, or spiking neural network approaches. Combining GRASP with these other methods could potentially lead to even stronger continual learning performance.
Overall, the GRASP technique represents an important step forward, but there is still room for further research to fully understand its capabilities and limitations within the broader context of continual learning.
Conclusion
This paper introduces a new sample selection policy called GRASP that aims to improve rehearsal-based continual learning in deep neural networks. By prioritizing the most prototypical or representative samples during the rehearsal process, GRASP is able to achieve higher accuracy and greater sample efficiency compared to a range of other rehearsal methods.
The key innovation of GRASP is its gradient-weighted adversarial sample scoring, which allows the model to focus first on the easiest examples before gradually incorporating more challenging ones. This appears to help the model build a robust feature representation that enables it to continually learn new information without catastrophically forgetting past knowledge.
While further research is needed to fully understand the mechanisms behind GRASP's success, this work represents an important contribution to the field of continual learning and provides a promising direction for improving the sample efficiency and performance of deep learning models operating in dynamic, non-stationary environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Watch Your Step: Optimal Retrieval for Continual Learning at Scale
Truman Hickok, Dhireesha Kudithipudi
0
0
In continual learning, a model learns incrementally over time while minimizing interference between old and new tasks. One of the most widely used approaches in continual learning is referred to as replay. Replay methods support interleaved learning by storing past experiences in a replay buffer. Although there are methods for selectively constructing the buffer and reprocessing its contents, there is limited exploration of the problem of selectively retrieving samples from the buffer. Current solutions have been tested in limited settings and, more importantly, in isolation. Existing work has also not explored the impact of duplicate replays on performance. In this work, we propose a framework for evaluating selective retrieval strategies, categorized by simple, independent class- and sample-selective primitives. We evaluated several combinations of existing strategies for selective retrieval and present their performances. Furthermore, we propose a set of strategies to prevent duplicate replays and explore whether new samples with low loss values can be learned without replay. In an effort to match our problem setting to a realistic continual learning pipeline, we restrict our experiments to a setting involving a large, pre-trained, open vocabulary object detection model, which is fully fine-tuned on a sequence of 15 datasets.
5/13/2024
Adaptive Memory Replay for Continual Learning
James Seale Smith, Lazar Valkov, Shaunak Halbe, Vyshnavi Gutta, Rogerio Feris, Zsolt Kira, Leonid Karlinsky
0
0
Foundation Models (FMs) have become the hallmark of modern AI, however, these models are trained on massive data, leading to financially expensive training. Updating FMs as new data becomes available is important, however, can lead to `catastrophic forgetting', where models underperform on tasks related to data sub-populations observed too long ago. This continual learning (CL) phenomenon has been extensively studied, but primarily in a setting where only a small amount of past data can be stored. We advocate for the paradigm where memory is abundant, allowing us to keep all previous data, but computational resources are limited. In this setting, traditional replay-based CL approaches are outperformed by a simple baseline which replays past data selected uniformly at random, indicating that this setting necessitates a new approach. We address this by introducing a framework of adaptive memory replay for continual learning, where sampling of past data is phrased as a multi-armed bandit problem. We utilize Bolzmann sampling to derive a method which dynamically selects past data for training conditioned on the current task, assuming full data access and emphasizing training efficiency. Through extensive evaluations on both vision and language pre-training tasks, we demonstrate the effectiveness of our approach, which maintains high performance while reducing forgetting by up to 10% at no training efficiency cost.
4/22/2024
✨
Brain-Inspired Continual Learning-Robust Feature Distillation and Re-Consolidation for Class Incremental Learning
Hikmat Khan, Nidhal Carla Bouaynaya, Ghulam Rasool
0
0
Artificial intelligence (AI) and neuroscience share a rich history, with advancements in neuroscience shaping the development of AI systems capable of human-like knowledge retention. Leveraging insights from neuroscience and existing research in adversarial and continual learning, we introduce a novel framework comprising two core concepts: feature distillation and re-consolidation. Our framework, named Robust Rehearsal, addresses the challenge of catastrophic forgetting inherent in continual learning (CL) systems by distilling and rehearsing robust features. Inspired by the mammalian brain's memory consolidation process, Robust Rehearsal aims to emulate the rehearsal of distilled experiences during learning tasks. Additionally, it mimics memory re-consolidation, where new experiences influence the integration of past experiences to mitigate forgetting. Extensive experiments conducted on CIFAR10, CIFAR100, and real-world helicopter attitude datasets showcase the superior performance of CL models trained with Robust Rehearsal compared to baseline methods. Furthermore, examining different optimization training objectives-joint, continual, and adversarial learning-we highlight the crucial role of feature learning in model performance. This underscores the significance of rehearsing CL-robust samples in mitigating catastrophic forgetting. In conclusion, aligning CL approaches with neuroscience insights offers promising solutions to the challenge of catastrophic forgetting, paving the way for more robust and human-like AI systems.
4/24/2024
🤔
Efficient Data-Parallel Continual Learning with Asynchronous Distributed Rehearsal Buffers
Thomas Bouvier (KerData), Bogdan Nicolae (ANL), Hugo Chaugier (KerData), Alexandru Costan (KerData), Ian Foster (ANL), Gabriel Antoniu (KerData)
0
0
Deep learning has emerged as a powerful method for extracting valuable information from large volumes of data. However, when new training data arrives continuously (i.e., is not fully available from the beginning), incremental training suffers from catastrophic forgetting (i.e., new patterns are reinforced at the expense of previously acquired knowledge). Training from scratch each time new training data becomes available would result in extremely long training times and massive data accumulation. Rehearsal-based continual learning has shown promise for addressing the catastrophic forgetting challenge, but research to date has not addressed performance and scalability. To fill this gap, we propose an approach based on a distributed rehearsal buffer that efficiently complements data-parallel training on multiple GPUs, allowing us to achieve short runtime and scalability while retaining high accuracy. It leverages a set of buffers (local to each GPU) and uses several asynchronous techniques for updating these local buffers in an embarrassingly parallel fashion, all while handling the communication overheads necessary to augment input mini-batches (groups of training samples fed to the model) using unbiased, global sampling. In this paper we explore the benefits of this approach for classification models. We run extensive experiments on up to 128 GPUs of the ThetaGPU supercomputer to compare our approach with baselines representative of training-from-scratch (the upper bound in terms of accuracy) and incremental training (the lower bound). Results show that rehearsal-based continual learning achieves a top-5 classification accuracy close to the upper bound, while simultaneously exhibiting a runtime close to the lower bound.
6/6/2024