Growing Q-Networks: Solving Continuous Control Tasks with Adaptive Control Resolution
2404.04253
0
0

Abstract
Recent reinforcement learning approaches have shown surprisingly strong capabilities of bang-bang policies for solving continuous control benchmarks. The underlying coarse action space discretizations often yield favourable exploration characteristics while final performance does not visibly suffer in the absence of action penalization in line with optimal control theory. In robotics applications, smooth control signals are commonly preferred to reduce system wear and energy efficiency, but action costs can be detrimental to exploration during early training. In this work, we aim to bridge this performance gap by growing discrete action spaces from coarse to fine control resolution, taking advantage of recent results in decoupled Q-learning to scale our approach to high-dimensional action spaces up to dim(A) = 38. Our work indicates that an adaptive control resolution in combination with value decomposition yields simple critic-only algorithms that yield surprisingly strong performance on continuous control tasks.
Create account to get full access
Overview
- This paper presents a new deep reinforcement learning approach called "Growing Q-Networks" (GQ-Networks) for solving continuous control tasks.
- The key idea is to adaptively grow the control resolution of the Q-network to match the complexity of the control task, allowing for efficient learning in high-dimensional continuous state-action spaces.
- The authors demonstrate the effectiveness of GQ-Networks on several challenging continuous control benchmark tasks, showing significant performance improvements over existing methods.
Plain English Explanation
The paper describes a new technique called "Growing Q-Networks" (GQ-Networks) for training artificial agents to perform complex, continuous control tasks. In many real-world control problems, such as robotics or autonomous vehicles, the agent must choose actions from a continuous range of possibilities (e.g., how much to turn the steering wheel) rather than from a discrete set of options.
Typical reinforcement learning algorithms struggle with such continuous control tasks, as they require discretizing the action space into a finite grid. This can lead to poor performance, as the agent may not be able to find the optimal actions within the coarse grid. The GQ-Network approach solves this problem by adaptively growing the control resolution of the neural network as training progresses, allowing it to learn a more fine-grained representation of the optimal actions.
The paper demonstrates the effectiveness of GQ-Networks on several challenging continuous control benchmarks, where the agent must learn to navigate complex environments and perform tasks like [link to "Extremum Seeking Action Selection" paper]. The authors show that GQ-Networks significantly outperform existing methods, highlighting the benefits of this adaptive control resolution approach for tackling high-dimensional continuous control problems.
Technical Explanation
The core idea behind GQ-Networks is to start with a coarse discretization of the action space and then adaptively refine this discretization as training progresses. The authors achieve this by introducing a "control resolution" parameter that determines the granularity of the action space representation in the Q-network.
Initially, the Q-network is trained using a low control resolution, which corresponds to a coarse discretization of the action space. As the training progresses and the Q-network becomes more accurate, the control resolution is gradually increased, allowing the network to learn a more fine-grained representation of the optimal actions.
The authors implement this adaptive control resolution mechanism by modifying the Q-network architecture to include a set of "resolution heads" that output the Q-values for different levels of control resolution. During training, the highest-resolution head is used to select actions, while the lower-resolution heads are used to initialize the higher-resolution heads, allowing for efficient learning.
The authors evaluate the performance of GQ-Networks on several continuous control benchmark tasks, including [link to "Continual Policy Distillation" paper], [link to "Intervention-Assisted Policy Gradient" paper], and [link to "Low-Rank MDPs" paper]. The results show that GQ-Networks consistently outperform existing methods, particularly in high-dimensional control tasks where the benefits of adaptive control resolution are most pronounced.
Critical Analysis
The GQ-Network approach presents a promising solution for tackling continuous control tasks in reinforcement learning, but it also has some potential limitations and areas for further research:
- The authors note that the adaptive control resolution mechanism may be sensitive to the specific hyperparameters used to control the growth of the resolution. More work is needed to ensure robust and reliable performance across a wide range of control tasks.
- The paper focuses on relatively simple continuous control tasks, and it's unclear how well the GQ-Network approach would scale to more complex, high-dimensional control problems. [link to "Online Control with Adaptive Large Neighborhood Search" paper]
- The authors do not provide a detailed analysis of the computational and memory overhead of the GQ-Network architecture, which could be an important consideration for practical applications.
Overall, the GQ-Network approach is a novel and promising contribution to the field of reinforcement learning for continuous control, but further research is needed to fully understand its strengths, limitations, and potential applications.
Conclusion
The "Growing Q-Networks" (GQ-Networks) approach presented in this paper offers a compelling solution for solving continuous control tasks in reinforcement learning. By adaptively growing the control resolution of the Q-network during training, GQ-Networks are able to efficiently learn optimal actions in high-dimensional state-action spaces, outperforming existing methods on a range of challenging benchmark tasks.
The key innovation of GQ-Networks is the adaptive control resolution mechanism, which allows the agent to start with a coarse representation of the action space and gradually refine it as learning progresses. This approach addresses a fundamental challenge in continuous control reinforcement learning, where traditional discretization-based methods struggle to find the optimal actions within a fixed, coarse grid.
The successful demonstration of GQ-Networks on several continuous control benchmarks highlights the potential of this technique for real-world applications, such as robotics, autonomous vehicles, and other complex control problems. As the field of reinforcement learning continues to advance, approaches like GQ-Networks that can effectively handle high-dimensional continuous control tasks will become increasingly important for developing capable and adaptable artificial agents.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
How to discretize continuous state-action spaces in Q-learning: A symbolic control approach
Sadek Belamfedel Alaoui, Adnane Saoud
0
0
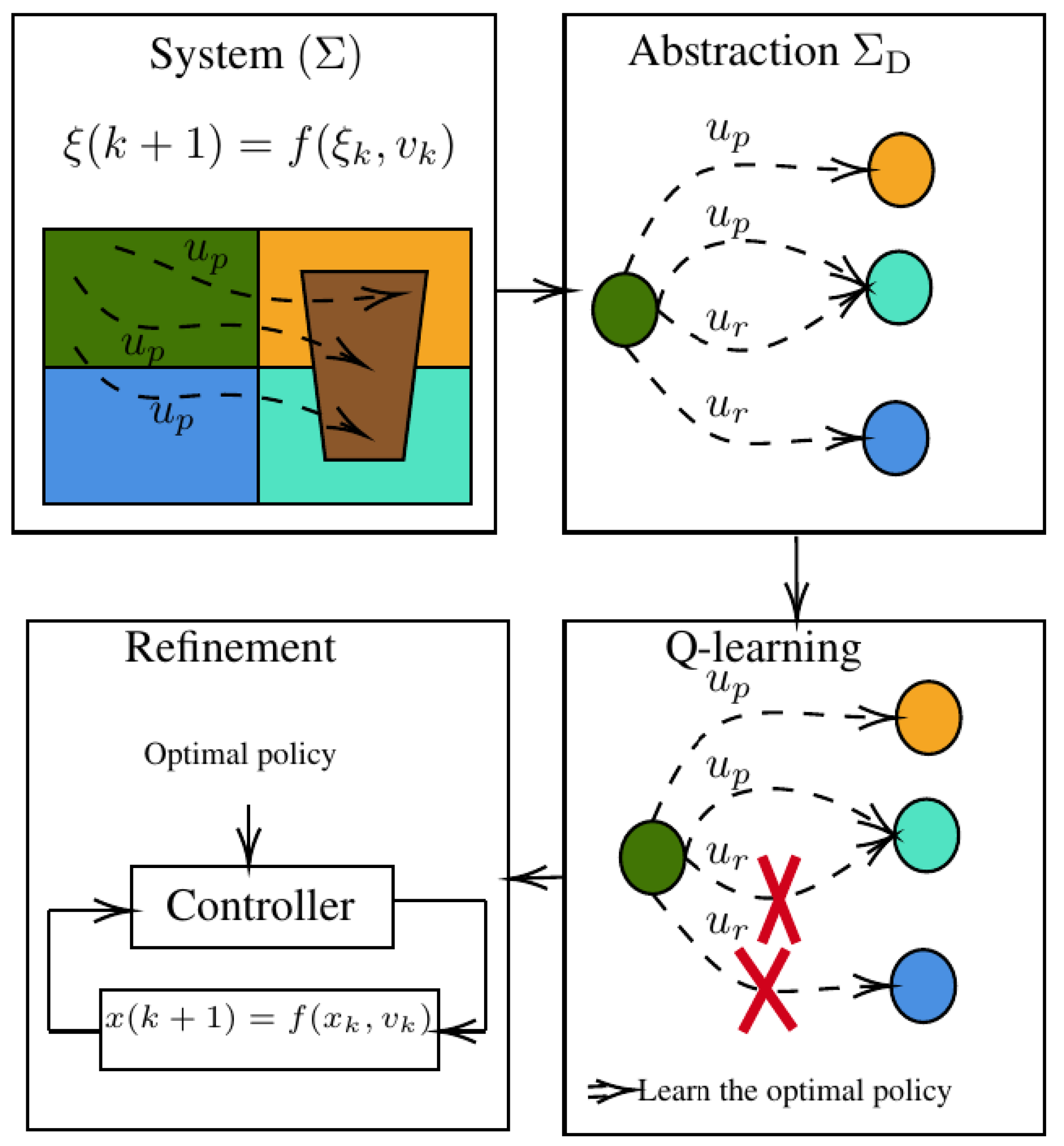
Q-learning is widely recognized as an effective approach for synthesizing controllers to achieve specific goals. However, handling challenges posed by continuous state-action spaces remains an ongoing research focus. This paper presents a systematic analysis that highlights a major drawback in space discretization methods. To address this challenge, the paper proposes a symbolic model that represents behavioral relations, such as alternating simulation from abstraction to the controlled system. This relation allows for seamless application of the synthesized controller based on abstraction to the original system. Introducing a novel Q-learning technique for symbolic models, the algorithm yields two Q-tables encoding optimal policies. Theoretical analysis demonstrates that these Q-tables serve as both upper and lower bounds on the Q-values of the original system with continuous spaces. Additionally, the paper explores the correlation between the parameters of the space abstraction and the loss in Q-values. The resulting algorithm facilitates achieving optimality within an arbitrary accuracy, providing control over the trade-off between accuracy and computational complexity. The obtained results provide valuable insights for selecting appropriate learning parameters and refining the controller. The engineering relevance of the proposed Q-learning based symbolic model is illustrated through two case studies.
6/7/2024
🤿
Deep Reinforcement Learning in Parameterized Action Space
Matthew Hausknecht, Peter Stone
0
0
Recent work has shown that deep neural networks are capable of approximating both value functions and policies in reinforcement learning domains featuring continuous state and action spaces. However, to the best of our knowledge no previous work has succeeded at using deep neural networks in structured (parameterized) continuous action spaces. To fill this gap, this paper focuses on learning within the domain of simulated RoboCup soccer, which features a small set of discrete action types, each of which is parameterized with continuous variables. The best learned agent can score goals more reliably than the 2012 RoboCup champion agent. As such, this paper represents a successful extension of deep reinforcement learning to the class of parameterized action space MDPs.
5/6/2024

Stochastic Q-learning for Large Discrete Action Spaces
Fares Fourati, Vaneet Aggarwal, Mohamed-Slim Alouini
0
0
In complex environments with large discrete action spaces, effective decision-making is critical in reinforcement learning (RL). Despite the widespread use of value-based RL approaches like Q-learning, they come with a computational burden, necessitating the maximization of a value function over all actions in each iteration. This burden becomes particularly challenging when addressing large-scale problems and using deep neural networks as function approximators. In this paper, we present stochastic value-based RL approaches which, in each iteration, as opposed to optimizing over the entire set of $n$ actions, only consider a variable stochastic set of a sublinear number of actions, possibly as small as $mathcal{O}(log(n))$. The presented stochastic value-based RL methods include, among others, Stochastic Q-learning, StochDQN, and StochDDQN, all of which integrate this stochastic approach for both value-function updates and action selection. The theoretical convergence of Stochastic Q-learning is established, while an analysis of stochastic maximization is provided. Moreover, through empirical validation, we illustrate that the various proposed approaches outperform the baseline methods across diverse environments, including different control problems, achieving near-optimal average returns in significantly reduced time.
5/17/2024
🏅
Continual Model-based Reinforcement Learning for Data Efficient Wireless Network Optimisation
Cengis Hasan, Alexandros Agapitos, David Lynch, Alberto Castagna, Giorgio Cruciata, Hao Wang, Aleksandar Milenovic
0
0
We present a method that addresses the pain point of long lead-time required to deploy cell-level parameter optimisation policies to new wireless network sites. Given a sequence of action spaces represented by overlapping subsets of cell-level configuration parameters provided by domain experts, we formulate throughput optimisation as Continual Reinforcement Learning of control policies. Simulation results suggest that the proposed system is able to shorten the end-to-end deployment lead-time by two-fold compared to a reinitialise-and-retrain baseline without any drop in optimisation gain.
5/1/2024