Hierarchical Learned Risk-Aware Planning Framework for Human Driving Modeling
2405.06578
0
0

Abstract
This paper presents a novel approach to modeling human driving behavior, designed for use in evaluating autonomous vehicle control systems in a simulation environments. Our methodology leverages a hierarchical forward-looking, risk-aware estimation framework with learned parameters to generate human-like driving trajectories, accommodating multiple driver levels determined by model parameters. This approach is grounded in multimodal trajectory prediction, using a deep neural network with LSTM-based social pooling to predict the trajectories of surrounding vehicles. These trajectories are used to compute forward-looking risk assessments along the ego vehicle's path, guiding its navigation. Our method aims to replicate human driving behaviors by learning parameters that emulate human decision-making during driving. We ensure that our model exhibits robust generalization capabilities by conducting simulations, employing real-world driving data to validate the accuracy of our approach in modeling human behavior. The results reveal that our model effectively captures human behavior, showcasing its versatility in modeling human drivers in diverse highway scenarios.
Create account to get full access
Overview
- This paper presents a hierarchical learned risk-aware planning framework for modeling human driving behavior in autonomous vehicle (AV) interactions.
- The framework combines risk-aware planning, social pooling, and trajectory prediction to enable AVs to anticipate and respond to the actions of human drivers in a more realistic and reliable way.
- The authors demonstrate the effectiveness of their approach through simulation experiments and compare it to other state-of-the-art methods.
Plain English Explanation
The researchers have developed a new way for autonomous vehicles (AVs) to predict and respond to the actions of human drivers on the road. The key idea is to create a multi-level system that can anticipate how humans will drive based on various factors, including the potential risks involved.
At the top level, the framework uses "risk-aware planning" to help the AV understand and account for the risks associated with different driving maneuvers. This allows the AV to make more informed decisions about how to interact with human drivers.
The middle level of the framework focuses on "social pooling," which means the AV considers how other vehicles and drivers around it are behaving and interacting. This helps the AV better anticipate and respond to the collective dynamics of the driving environment.
Finally, the lowest level of the framework uses "trajectory prediction" to forecast the likely paths that individual human drivers will take. By combining these different components, the AV can build a more accurate and comprehensive model of the driving situation, enabling it to navigate more safely and effectively.
The researchers tested their framework through computer simulations and found that it outperformed other state-of-the-art methods for predicting and managing human-AV interactions on the road. This suggests that their approach could be a valuable tool for improving the safety and reliability of autonomous driving systems.
Technical Explanation
The paper presents a hierarchical learned risk-aware planning framework for modeling human driving behavior in the context of autonomous vehicle (AV) interactions. The framework integrates three key components:
-
Risk-Aware Planning: The top-level of the framework uses a risk-aware planning module to help the AV understand and account for the potential risks associated with different driving maneuvers. This allows the AV to make more informed and safer decisions when navigating around human drivers.
-
Social Pooling: The middle level of the framework focuses on "social pooling," which means the AV considers how other vehicles and drivers around it are behaving and interacting. This helps the AV better anticipate and respond to the collective dynamics of the driving environment, as described in this related work.
-
Trajectory Prediction: The lowest level of the framework uses a trajectory prediction module to forecast the likely paths that individual human drivers will take, building on approaches like this.
By combining these three components, the framework can build a more accurate and comprehensive model of the driving situation, enabling the AV to navigate more safely and effectively around human drivers.
The authors evaluate their framework through simulation experiments, comparing its performance to other state-of-the-art methods for human driving modeling and automated driving scenarios. The results demonstrate the effectiveness of their approach in anticipating and responding to the actions of human drivers.
Critical Analysis
The paper provides a well-designed and thorough framework for modeling human driving behavior in the context of autonomous vehicle (AV) interactions. The hierarchical structure, which integrates risk-aware planning, social pooling, and trajectory prediction, is a thoughtful and comprehensive approach to this challenge.
One potential limitation of the research is the reliance on simulation experiments. While the simulation results are promising, it will be important to validate the framework's performance in real-world driving scenarios to fully assess its practical applicability and effectiveness.
Additionally, the paper does not delve into the potential ethical implications of this type of technology, such as how the risk-aware planning module might prioritize the safety of the AV over the safety of human drivers in certain situations. Further exploration of these ethical considerations would be valuable.
Overall, the researchers have made a significant contribution to the field of autonomous driving with their hierarchical learned risk-aware planning framework. However, continued refinement, real-world testing, and ethical analysis will be important next steps to ensure the responsible development and deployment of this technology.
Conclusion
The paper presents a novel hierarchical learned risk-aware planning framework for modeling human driving behavior in autonomous vehicle (AV) interactions. By integrating risk-aware planning, social pooling, and trajectory prediction, the framework enables AVs to anticipate and respond to the actions of human drivers in a more realistic and reliable way.
The simulation results demonstrate the effectiveness of the researchers' approach, suggesting that this framework could be a valuable tool for improving the safety and reliability of autonomous driving systems. However, further validation in real-world scenarios and consideration of the ethical implications will be important to ensure the responsible development and deployment of this technology.
Overall, this research represents a significant advancement in the field of autonomous driving, and the authors' innovative approach to human driving modeling could have important implications for the future of transportation and mobility.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Motion planning for off-road autonomous driving based on human-like cognition and weight adaptation
Yuchun Wang, Cheng Gong, Jianwei Gong, Peng Jia
0
0
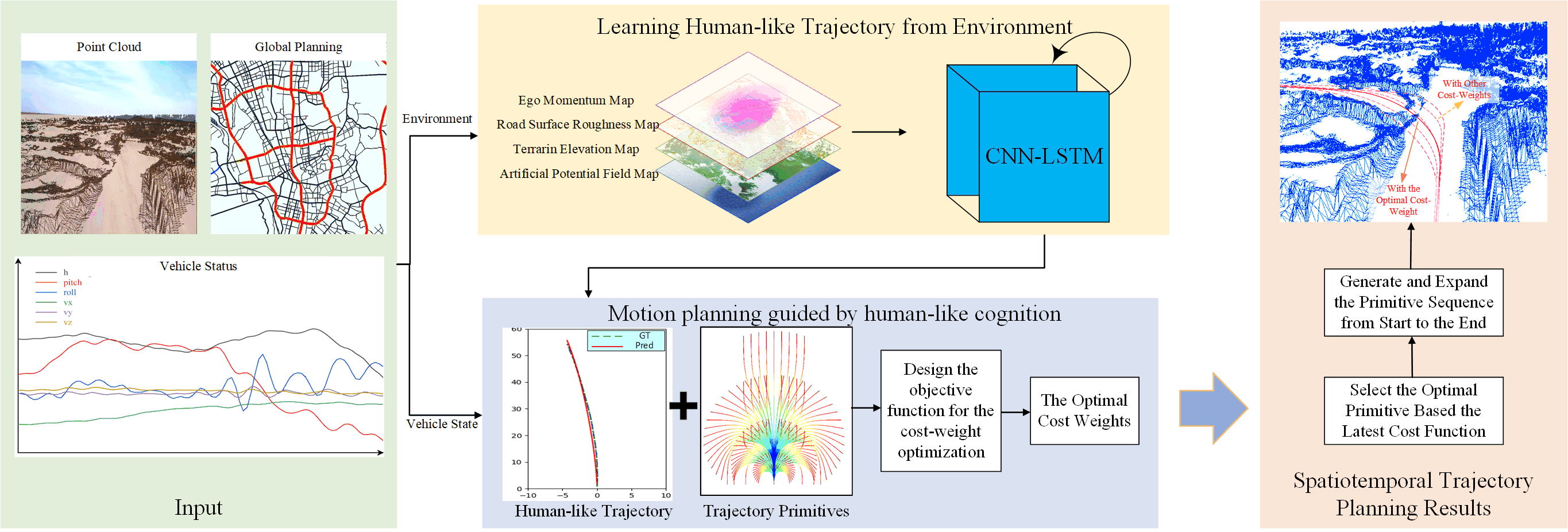
Driving in an off-road environment is challenging for autonomous vehicles due to the complex and varied terrain. To ensure stable and efficient travel, the vehicle requires consideration and balancing of environmental factors, such as undulations, roughness, and obstacles, to generate optimal trajectories that can adapt to changing scenarios. However, traditional motion planners often utilize a fixed cost function for trajectory optimization, making it difficult to adapt to different driving strategies in challenging irregular terrains and uncommon scenarios. To address these issues, we propose an adaptive motion planner based on human-like cognition and cost evaluation for off-road driving. First, we construct a multi-layer map describing different features of off-road terrains, including terrain elevation, roughness, obstacle, and artificial potential field map. Subsequently, we employ a CNN-LSTM network to learn the trajectories planned by human drivers in various off-road scenarios. Then, based on human-like generated trajectories in different environments, we design a primitive-based trajectory planner that aims to mimic human trajectories and cost weight selection, generating trajectories that are consistent with the dynamics of off-road vehicles. Finally, we compute optimal cost weights and select and extend behavioral primitives to generate highly adaptive, stable, and efficient trajectories. We validate the effectiveness of the proposed method through experiments in a desert off-road environment with complex terrain and varying road conditions. The experimental results show that the proposed human-like motion planner has excellent adaptability to different off-road conditions. It shows real-time operation, greater stability, and more human-like planning ability in diverse and challenging scenarios.
4/30/2024
🧪
Learning-Based Modeling of Human-Autonomous Vehicle Interaction for Improved Safety in Mixed-Vehicle Platooning Control
Jie Wang, Yash Vardhan Pant, Zhihao Jiang
0
0
The rising presence of autonomous vehicles (AVs) on public roads necessitates the development of advanced control strategies that account for the unpredictable nature of human-driven vehicles (HVs). This study introduces a learning-based method for modeling HV behavior, combining a traditional first-principles approach with a Gaussian process (GP) learning component. This hybrid model enhances the accuracy of velocity predictions and provides measurable uncertainty estimates. We leverage this model to develop a GP-based model predictive control (GP-MPC) strategy to improve safety in mixed vehicle platoons by integrating uncertainty assessments into distance constraints. Comparative simulations between our GP-MPC approach and a conventional model predictive control (MPC) strategy reveal that the GP-MPC ensures safer distancing and more efficient travel within the mixed platoon. By incorporating sparse GP modeling for HVs and a dynamic GP prediction in MPC, we significantly reduce the computation time of GP-MPC, making it only marginally longer than standard MPC and approximately 100 times faster than previous models not employing these techniques. Our findings underscore the effectiveness of learning-based HV modeling in enhancing safety and efficiency in mixed-traffic environments involving AV and HV interactions.
4/9/2024
🔮
A Cognitive-Driven Trajectory Prediction Model for Autonomous Driving in Mixed Autonomy Environment
Haicheng Liao, Zhenning Li, Chengyue Wang, Bonan Wang, Hanlin Kong, Yanchen Guan, Guofa Li, Zhiyong Cui, Chengzhong Xu
0
0
As autonomous driving technology progresses, the need for precise trajectory prediction models becomes paramount. This paper introduces an innovative model that infuses cognitive insights into trajectory prediction, focusing on perceived safety and dynamic decision-making. Distinct from traditional approaches, our model excels in analyzing interactions and behavior patterns in mixed autonomy traffic scenarios. It represents a significant leap forward, achieving marked performance improvements on several key datasets. Specifically, it surpasses existing benchmarks with gains of 16.2% on the Next Generation Simulation (NGSIM), 27.4% on the Highway Drone (HighD), and 19.8% on the Macao Connected Autonomous Driving (MoCAD) dataset. Our proposed model shows exceptional proficiency in handling corner cases, essential for real-world applications. Moreover, its robustness is evident in scenarios with missing or limited data, outperforming most of the state-of-the-art baselines. This adaptability and resilience position our model as a viable tool for real-world autonomous driving systems, heralding a new standard in vehicle trajectory prediction for enhanced safety and efficiency.
4/29/2024
In-context Learning for Automated Driving Scenarios
Ziqi Zhou, Jingyue Zhang, Jingyuan Zhang, Boyue Wang, Tianyu Shi, Alaa Khamis
0
0
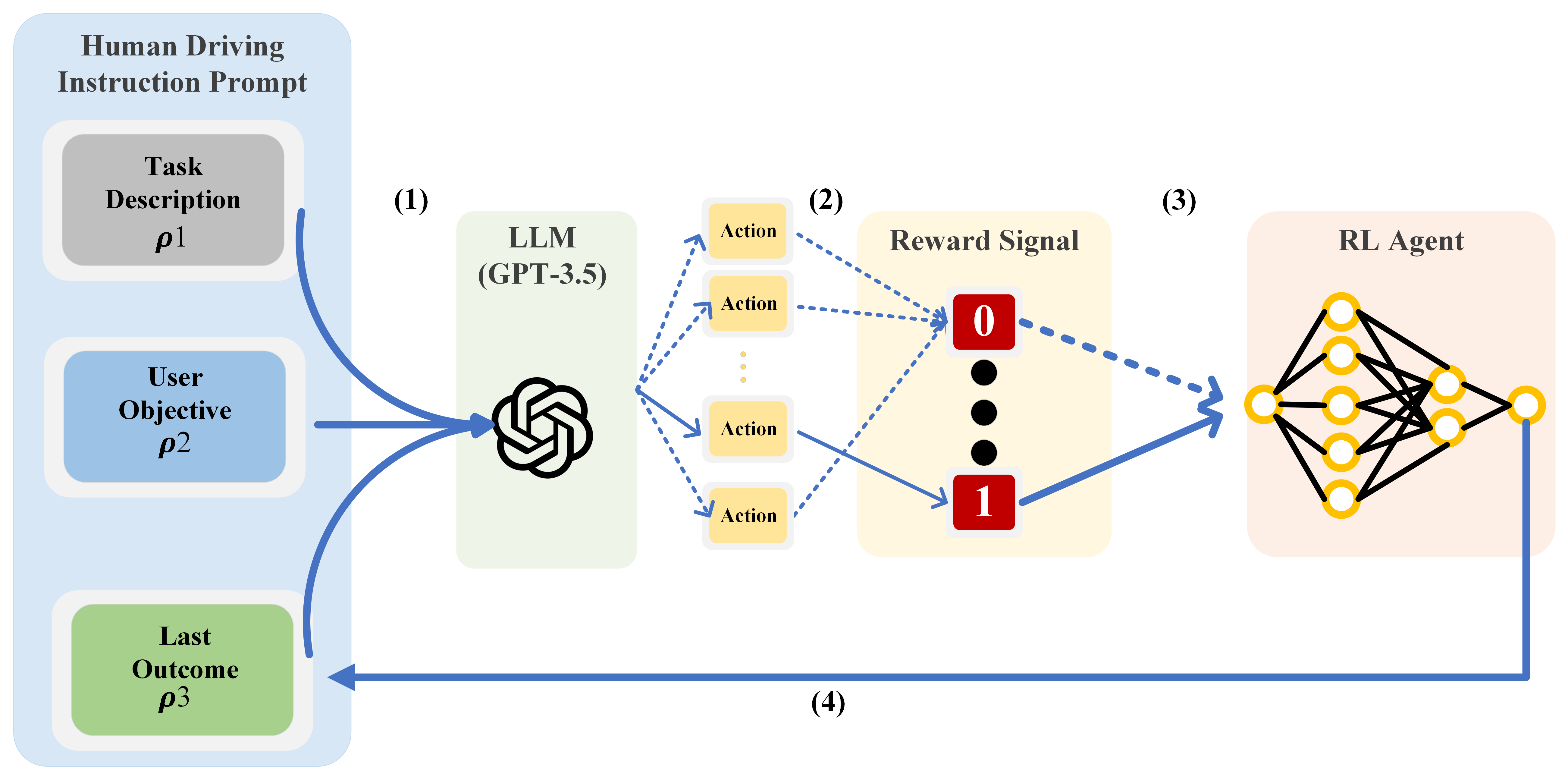
One of the key challenges in current Reinforcement Learning (RL)-based Automated Driving (AD) agents is achieving flexible, precise, and human-like behavior cost-effectively. This paper introduces an innovative approach utilizing Large Language Models (LLMs) to intuitively and effectively optimize RL reward functions in a human-centric way. We developed a framework where instructions and dynamic environment descriptions are input into the LLM. The LLM then utilizes this information to assist in generating rewards, thereby steering the behavior of RL agents towards patterns that more closely resemble human driving. The experimental results demonstrate that this approach not only makes RL agents more anthropomorphic but also reaches better performance. Additionally, various strategies for reward-proxy and reward-shaping are investigated, revealing the significant impact of prompt design on shaping an AD vehicle's behavior. These findings offer a promising direction for the development of more advanced and human-like automated driving systems. Our experimental data and source code can be found here.
5/8/2024