Motion planning for off-road autonomous driving based on human-like cognition and weight adaptation
2404.17820
0
0
Abstract
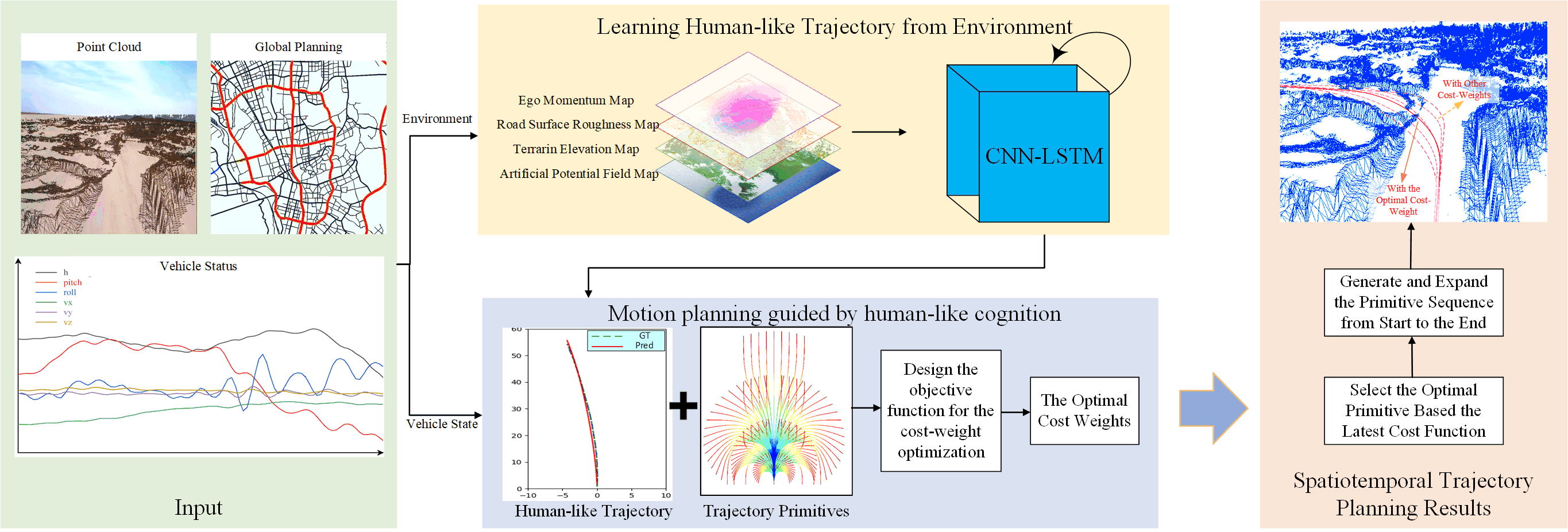
Driving in an off-road environment is challenging for autonomous vehicles due to the complex and varied terrain. To ensure stable and efficient travel, the vehicle requires consideration and balancing of environmental factors, such as undulations, roughness, and obstacles, to generate optimal trajectories that can adapt to changing scenarios. However, traditional motion planners often utilize a fixed cost function for trajectory optimization, making it difficult to adapt to different driving strategies in challenging irregular terrains and uncommon scenarios. To address these issues, we propose an adaptive motion planner based on human-like cognition and cost evaluation for off-road driving. First, we construct a multi-layer map describing different features of off-road terrains, including terrain elevation, roughness, obstacle, and artificial potential field map. Subsequently, we employ a CNN-LSTM network to learn the trajectories planned by human drivers in various off-road scenarios. Then, based on human-like generated trajectories in different environments, we design a primitive-based trajectory planner that aims to mimic human trajectories and cost weight selection, generating trajectories that are consistent with the dynamics of off-road vehicles. Finally, we compute optimal cost weights and select and extend behavioral primitives to generate highly adaptive, stable, and efficient trajectories. We validate the effectiveness of the proposed method through experiments in a desert off-road environment with complex terrain and varying road conditions. The experimental results show that the proposed human-like motion planner has excellent adaptability to different off-road conditions. It shows real-time operation, greater stability, and more human-like planning ability in diverse and challenging scenarios.
Create account to get full access
Overview
- This paper presents a motion planning approach for off-road autonomous driving that is inspired by human-like cognition and weight adaptation.
- The proposed method aims to enable autonomous vehicles to navigate challenging off-road environments more effectively by incorporating human-like decision-making processes and adaptability.
- Key innovations include a cognitive planner that mimics human reasoning and a weight adaptation mechanism that adjusts the planner's priorities based on the current driving conditions.
Plain English Explanation
The researchers have developed a new way for self-driving cars to navigate rough, off-road terrain. Instead of relying solely on traditional motion planning algorithms, their approach is inspired by how humans think and make decisions when driving.
The cognitive planner in their system tries to mimic the human thought process, considering factors like safety, efficiency, and terrain difficulty when planning the vehicle's path. This allows the autonomous car to make more human-like judgments about the best way to traverse challenging off-road environments, rather than just following a pre-determined set of rules.
Additionally, the system has a "weight adaptation" mechanism that can adjust the relative importance of these different factors on the fly, based on the current driving conditions. For example, if the terrain becomes particularly rough, the system may place more weight on safety and stability rather than pure efficiency.
By combining this human-inspired cognition with the ability to dynamically adapt its priorities, the researchers believe their motion planning approach can enable autonomous vehicles to navigate off-road settings more effectively than previous methods. This could be particularly useful for applications like autonomous off-road navigation or navigating complex environments where traditional approaches may struggle.
Technical Explanation
The paper's key innovation is a cognitive planner that incorporates human-like decision-making into the motion planning process for off-road autonomous driving. This planner considers multiple factors, such as safety, efficiency, and terrain difficulty, when generating trajectories, similar to how a human driver would.
To achieve this, the authors developed a novel weight adaptation mechanism that dynamically adjusts the relative importance of these different factors based on the current driving conditions. This allows the planner to prioritize certain objectives over others as the environment changes, mimicking the adaptability of human drivers.
The weight adaptation is implemented using a deep neural network that takes the current state of the vehicle and the surrounding environment as input and outputs the appropriate weighting for each planning objective. This network is trained offline using reinforcement learning to optimize the vehicle's performance in a variety of simulated off-road scenarios.
Through extensive testing in both simulation and real-world experiments, the authors demonstrate that their cognitive-driven motion planning approach outperforms traditional planning algorithms in terms of safety, efficiency, and the ability to navigate challenging off-road terrain.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed motion planning approach, including both simulation and real-world experiments. The authors acknowledge some limitations, such as the need to further improve the weight adaptation mechanism and the reliance on accurate perception of the environment.
One potential concern is the computational complexity of the cognitive planner and weight adaptation network, which could pose challenges for real-time implementation on resource-constrained autonomous vehicles. The authors do not provide a detailed analysis of the runtime performance of their approach.
Additionally, the paper does not address the potential ethical implications of deploying such an autonomous driving system in the real world. Issues around accountability, liability, and the ability of the system to make appropriate moral judgments in complex situations should be considered.
Overall, this research represents an interesting and promising step towards more human-like cognition in autonomous driving systems, particularly for off-road applications. However, further work is needed to address the practical and ethical considerations before such an approach could be widely adopted.
Conclusion
This paper presents a novel motion planning approach for off-road autonomous driving that is inspired by human-like cognition and weight adaptation. By incorporating decision-making processes similar to those of human drivers, the proposed system aims to enable autonomous vehicles to navigate challenging environments more effectively.
The key innovations include a cognitive planner that considers multiple factors when generating trajectories and a weight adaptation mechanism that dynamically adjusts the relative importance of these factors based on the current driving conditions. Through extensive testing, the authors demonstrate the advantages of this approach over traditional planning algorithms.
While the research shows promising results, there are still some practical and ethical considerations that need to be addressed before such a system could be widely deployed. Nonetheless, this work represents an important step towards more human-like autonomy in self-driving cars, with potential applications in a variety of off-road and complex driving scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Hierarchical Learned Risk-Aware Planning Framework for Human Driving Modeling
Nathan Ludlow, Yiwei Lyu, John Dolan
0
0
This paper presents a novel approach to modeling human driving behavior, designed for use in evaluating autonomous vehicle control systems in a simulation environments. Our methodology leverages a hierarchical forward-looking, risk-aware estimation framework with learned parameters to generate human-like driving trajectories, accommodating multiple driver levels determined by model parameters. This approach is grounded in multimodal trajectory prediction, using a deep neural network with LSTM-based social pooling to predict the trajectories of surrounding vehicles. These trajectories are used to compute forward-looking risk assessments along the ego vehicle's path, guiding its navigation. Our method aims to replicate human driving behaviors by learning parameters that emulate human decision-making during driving. We ensure that our model exhibits robust generalization capabilities by conducting simulations, employing real-world driving data to validate the accuracy of our approach in modeling human behavior. The results reveal that our model effectively captures human behavior, showcasing its versatility in modeling human drivers in diverse highway scenarios.
5/13/2024

Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
0
0
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
6/6/2024

Learning Generic and Dynamic Locomotion of Humanoids Across Discrete Terrains
Shangqun Yu, Nisal Perera, Daniel Marew, Donghyun Kim
0
0
This paper addresses the challenge of terrain-adaptive dynamic locomotion in humanoid robots, a problem traditionally tackled by optimization-based methods or reinforcement learning (RL). Optimization-based methods, such as model-predictive control, excel in finding optimal reaction forces and achieving agile locomotion, especially in quadruped, but struggle with the nonlinear hybrid dynamics of legged systems and the real-time computation of step location, timing, and reaction forces. Conversely, RL-based methods show promise in navigating dynamic and rough terrains but are limited by their extensive data requirements. We introduce a novel locomotion architecture that integrates a neural network policy, trained through RL in simplified environments, with a state-of-the-art motion controller combining model-predictive control (MPC) and whole-body impulse control (WBIC). The policy efficiently learns high-level locomotion strategies, such as gait selection and step positioning, without the need for full dynamics simulations. This control architecture enables humanoid robots to dynamically navigate discrete terrains, making strategic locomotion decisions (e.g., walking, jumping, and leaping) based on ground height maps. Our results demonstrate that this integrated control architecture achieves dynamic locomotion with significantly fewer training samples than conventional RL-based methods and can be transferred to different humanoid platforms without additional training. The control architecture has been extensively tested in dynamic simulations, accomplishing terrain height-based dynamic locomotion for three different robots.
5/28/2024

Planning with Adaptive World Models for Autonomous Driving
Arun Balajee Vasudevan, Neehar Peri, Jeff Schneider, Deva Ramanan
0
0
Motion planning is crucial for safe navigation in complex urban environments. Historically, motion planners (MPs) have been evaluated with procedurally-generated simulators like CARLA. However, such synthetic benchmarks do not capture real-world multi-agent interactions. nuPlan, a recently released MP benchmark, addresses this limitation by augmenting real-world driving logs with closed-loop simulation logic, effectively turning the fixed dataset into a reactive simulator. We analyze the characteristics of nuPlan's recorded logs and find that each city has its own unique driving behaviors, suggesting that robust planners must adapt to different environments. We learn to model such unique behaviors with BehaviorNet, a graph convolutional neural network (GCNN) that predicts reactive agent behaviors using features derived from recently-observed agent histories; intuitively, some aggressive agents may tailgate lead vehicles, while others may not. To model such phenomena, BehaviorNet predicts parameters of an agent's motion controller rather than predicting its spacetime trajectory (as most forecasters do). Finally, we present AdaptiveDriver, a model-predictive control (MPC) based planner that unrolls different world models conditioned on BehaviorNet's predictions. Our extensive experiments demonstrate that AdaptiveDriver achieves state-of-the-art results on the nuPlan closed-loop planning benchmark, reducing test error from 6.4% to 4.6%, even when applied to never-before-seen cities.
6/18/2024