High-Fidelity Mask-free Neural Surface Reconstruction for Virtual Reality

0
Sign in to get full access
Overview
- This paper presents a new neural network-based approach for reconstructing high-fidelity 3D surfaces from image data without the need for special camera rigs or capturing masks.
- The proposed framework, called Hi-NeuS, can generate detailed 3D models suitable for virtual reality applications.
- The key innovations include a new neural network architecture and training process that enables accurate reconstruction of fine surface details.
Plain English Explanation
The paper introduces a new method for reconstructing 3D models from image data. Unlike previous approaches, this method does not require special camera setups or capturing masks to get high-quality results.
The proposed Hi-NeuS framework uses a novel neural network design and training process to accurately reconstruct fine surface details, making the 3D models suitable for virtual reality applications.
This is an important advancement, as it allows 3D content to be created more easily and cost-effectively compared to traditional methods that require specialized hardware and complex setups. The ability to capture high-fidelity 3D models without masks opens up new possibilities for a range of VR and AR applications.
Technical Explanation
The Hi-NeuS framework introduces several key innovations to enable high-fidelity, mask-free 3D surface reconstruction:
-
Neural Network Architecture: The framework uses a specialized neural network design that includes components for modeling the surface geometry, appearance, and view-dependent effects. This allows the network to capture fine surface details and realistic lighting.
-
Training Process: The training process involves optimizing the neural network parameters using a combination of 2D image data and 3D supervision signals. This enables the network to learn accurate 3D reconstruction without the need for capture masks.
-
Rendering Approach: Hi-NeuS uses a neural rendering approach that efficiently integrates the learnt surface and appearance models to generate the final 3D reconstruction. This allows for high-quality rendering of the reconstructed surfaces.
The paper presents extensive experiments demonstrating the effectiveness of the Hi-NeuS framework on a variety of real-world scenes. The results show that the approach can generate high-fidelity 3D models that are suitable for virtual reality applications, outperforming previous state-of-the-art methods.
Critical Analysis
The paper presents a promising approach for high-fidelity 3D reconstruction that addresses some key limitations of prior work. However, there are a few potential caveats and areas for further research:
-
Generalization Ability: While the results on the evaluated datasets are impressive, it would be important to test the framework's ability to generalize to a wider range of scenes and object types. The paper does not provide much analysis on the model's robustness to variations in lighting, textures, or scene complexity.
-
Computational Efficiency: The neural rendering approach used in Hi-NeuS may have high computational requirements, which could limit its practical deployment, especially for real-time applications. Further optimization of the rendering process could be an area for future research.
-
Handling Occlusions: The paper does not provide a detailed discussion of how the framework handles occluded or missing data in the input images. Robust handling of occlusions is an important practical consideration for many real-world scenarios.
-
Integration with Downstream Tasks: While the paper focuses on the 3D reconstruction task, it would be valuable to explore how the generated 3D models can be effectively integrated and used in downstream VR/AR applications, such as interactive visualization or content creation.
Overall, the Hi-NeuS framework represents a significant step forward in neural 3D reconstruction and has the potential to enable more accessible and high-quality 3D content creation for virtual reality and other applications.
Conclusion
This paper presents the Hi-NeuS framework, a novel neural network-based approach for high-fidelity 3D surface reconstruction from image data without the need for special capture setups or masks. The key innovations in the network architecture and training process allow Hi-NeuS to generate detailed 3D models suitable for virtual reality applications.
The results demonstrate that Hi-NeuS outperforms previous state-of-the-art methods, opening up new possibilities for more accessible and cost-effective 3D content creation. While the paper highlights some areas for further research, such as generalization, computational efficiency, and integration with downstream tasks, the Hi-NeuS framework represents a significant advancement in the field of neural 3D reconstruction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
High-Fidelity Mask-free Neural Surface Reconstruction for Virtual Reality
Haotian Bai, Yize Chen, Lin Wang
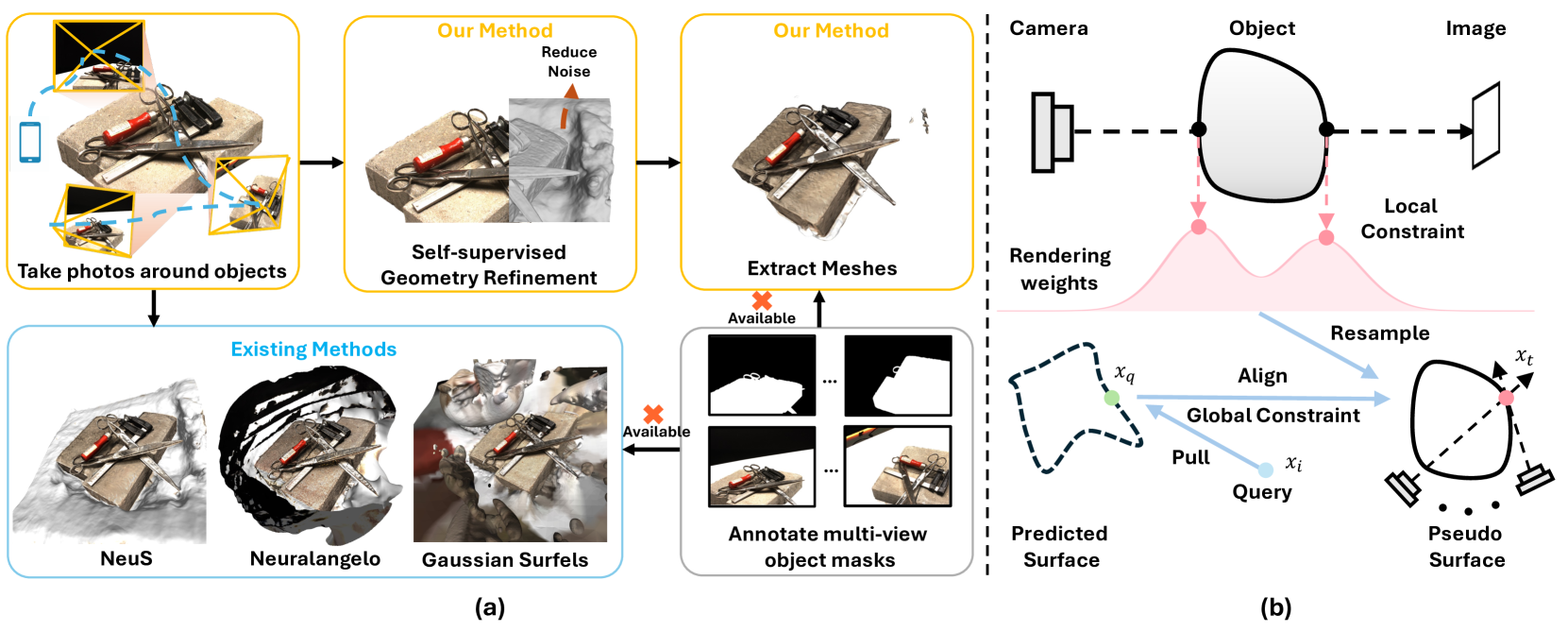
Object-centric surface reconstruction from multi-view images is crucial in creating editable digital assets for AR/VR. Due to the lack of geometric constraints, existing methods, e.g., NeuS necessitate annotating the object masks to reconstruct compact surfaces in mesh processing. Mask annotation, however, incurs considerable labor costs due to its cumbersome nature. This paper presents Hi-NeuS, a novel rendering-based framework for neural implicit surface reconstruction, aiming to recover compact and precise surfaces without multi-view object masks. Our key insight is that the overlapping regions in the object-centric views naturally highlight the object of interest as the camera orbits around objects. The object of interest can be specified by estimating the distribution of the rendering weights accumulated from multiple views, which implicitly identifies the surface that a user intends to capture. This inspires us to design a geometric refinement approach, which takes multi-view rendering weights to guide the signed distance functions (SDF) of neural surfaces in a self-supervised manner. Specifically, it retains these weights to resample a pseudo surface based on their distribution. This facilitates the alignment of the SDF to the object of interest. We then regularize the SDF's bias for geometric consistency. Moreover, we propose to use unmasked Chamfer Distance(CD) to measure the extracted mesh without post-processing for more precise evaluation. Our approach has been validated through NeuS and its variant Neuralangelo, demonstrating its adaptability across different NeuS backbones. Extensive benchmark on the DTU dataset shows that our method reduces surface noise by about 20%, and improves the unmasked CD by around 30%, achieving better surface details. The superiority of Hi-NeuS is further validated on BlendedMVS and handheld camera captures for content creation.
Read more9/23/2024

0
A Comparative Study of Neural Surface Reconstruction for Scientific Visualization
Siyuan Yao, Weixi Song, Chaoli Wang
This comparative study evaluates various neural surface reconstruction methods, particularly focusing on their implications for scientific visualization through reconstructing 3D surfaces via multi-view rendering images. We categorize ten methods into neural radiance fields and neural implicit surfaces, uncovering the benefits of leveraging distance functions (i.e., SDFs and UDFs) to enhance the accuracy and smoothness of the reconstructed surfaces. Our findings highlight the efficiency and quality of NeuS2 for reconstructing closed surfaces and identify NeUDF as a promising candidate for reconstructing open surfaces despite some limitations. By sharing our benchmark dataset, we invite researchers to test the performance of their methods, contributing to the advancement of surface reconstruction solutions for scientific visualization.
Read more7/31/2024

0
Surface-Centric Modeling for High-Fidelity Generalizable Neural Surface Reconstruction
Rui Peng, Shihe Shen, Kaiqiang Xiong, Huachen Gao, Jianbo Jiao, Xiaodong Gu, Ronggang Wang
Reconstructing the high-fidelity surface from multi-view images, especially sparse images, is a critical and practical task that has attracted widespread attention in recent years. However, existing methods are impeded by the memory constraint or the requirement of ground-truth depths and cannot recover satisfactory geometric details. To this end, we propose SuRF, a new Surface-centric framework that incorporates a new Region sparsification based on a matching Field, achieving good trade-offs between performance, efficiency and scalability. To our knowledge, this is the first unsupervised method achieving end-to-end sparsification powered by the introduced matching field, which leverages the weight distribution to efficiently locate the boundary regions containing surface. Instead of predicting an SDF value for each voxel, we present a new region sparsification approach to sparse the volume by judging whether the voxel is inside the surface region. In this way, our model can exploit higher frequency features around the surface with less memory and computational consumption. Extensive experiments on multiple benchmarks containing complex large-scale scenes show that our reconstructions exhibit high-quality details and achieve new state-of-the-art performance, i.e., 46% improvements with 80% less memory consumption. Code is available at https://github.com/prstrive/SuRF.
Read more9/6/2024

0
Parameterization-driven Neural Surface Reconstruction for Object-oriented Editing in Neural Rendering
Baixin Xu, Jiangbei Hu, Fei Hou, Kwan-Yee Lin, Wayne Wu, Chen Qian, Ying He
The advancements in neural rendering have increased the need for techniques that enable intuitive editing of 3D objects represented as neural implicit surfaces. This paper introduces a novel neural algorithm for parameterizing neural implicit surfaces to simple parametric domains like spheres and polycubes. Our method allows users to specify the number of cubes in the parametric domain, learning a configuration that closely resembles the target 3D object's geometry. It computes bi-directional deformation between the object and the domain using a forward mapping from the object's zero level set and an inverse deformation for backward mapping. We ensure nearly bijective mapping with a cycle loss and optimize deformation smoothness. The parameterization quality, assessed by angle and area distortions, is guaranteed using a Laplacian regularizer and an optimized learned parametric domain. Our framework integrates with existing neural rendering pipelines, using multi-view images of a single object or multiple objects of similar geometries to reconstruct 3D geometry and compute texture maps automatically, eliminating the need for any prior information. We demonstrate the method's effectiveness on images of human heads and man-made objects.
Read more7/16/2024