HUP-3D: A 3D multi-view synthetic dataset for assisted-egocentric hand-ultrasound pose estimation

0

Sign in to get full access
Overview
- This paper introduces HUP-3D, a novel 3D multi-view synthetic dataset for assisted-egocentric hand-ultrasound pose estimation.
- The dataset is designed to support the development of computer vision techniques that can accurately estimate the 3D position and orientation of a hand and an ultrasound probe in an egocentric (first-person) setting.
- The authors demonstrate the utility of the HUP-3D dataset by training a deep learning model to jointly estimate the 3D hand and ultrasound probe poses, which could have applications in medical robotics and augmented reality-based surgical guidance.
Plain English Explanation
The paper describes the creation of a new dataset called HUP-3D that can be used to train computer vision models to understand the 3D position and orientation of a person's hand and an ultrasound probe in a first-person or "egocentric" view. This type of technology could be useful for medical applications, such as helping robotic systems or augmented reality displays provide guidance during procedures that involve an ultrasound probe.
The key idea is that the HUP-3D dataset provides realistic synthetic 3D data showing hands and ultrasound probes from multiple camera angles. This data can be used to train machine learning models to recognize the 3D pose of the hand and probe, which is a challenging computer vision task. By having a large, diverse dataset, the models can learn to accurately estimate the 3D pose in real-world scenarios.
The authors demonstrate the usefulness of the HUP-3D dataset by training a deep learning model that can jointly estimate the 3D pose of the hand and ultrasound probe. This type of technology could enable new applications in medical robotics and augmented reality to provide guidance and assistance during procedures that involve handheld ultrasound devices.
Technical Explanation
The paper introduces the HUP-3D dataset, a novel 3D multi-view synthetic dataset for assisted-egocentric hand-ultrasound pose estimation. The dataset contains realistic 3D renderings of hands interacting with an ultrasound probe from multiple camera viewpoints.
The authors designed HUP-3D to support the development of computer vision techniques that can accurately estimate the 3D position and orientation (pose) of a hand and an ultrasound probe in an egocentric setting. This type of technology could enable new applications in medical robotics and augmented reality-based surgical guidance, where precise tracking of the hand and probe is crucial.
To demonstrate the utility of the HUP-3D dataset, the authors train a deep learning model to jointly estimate the 3D poses of the hand and ultrasound probe. The model builds on prior work in 2D hand pose estimation and 3D human pose perception from egocentric stereo to handle the additional complexity of the ultrasound probe.
The authors evaluate their model's performance on the HUP-3D dataset and compare it to other state-of-the-art approaches, demonstrating the advantages of their joint hand-ultrasound pose estimation technique. The results highlight the value of the HUP-3D dataset in advancing the state of the art in uncertainty-aware 3D human pose estimation for medical applications.
Critical Analysis
The HUP-3D dataset and the associated hand-ultrasound pose estimation model represent a significant advancement in egocentric computer vision for medical applications. By providing a large, diverse, and realistic synthetic dataset, the authors have enabled the development of more robust and accurate 3D pose estimation techniques.
However, the authors acknowledge that the HUP-3D dataset is limited to simulated data and may not fully capture the complexities of real-world medical scenarios. Further research is needed to validate the performance of the trained models on actual clinical data, and to address potential challenges such as occlusions, lighting variations, and the diversity of hand and probe shapes.
Additionally, the authors do not provide a detailed analysis of the model's generalization capabilities or its robustness to variations in hand and probe configurations, which could be important for real-world deployment. Future work could explore techniques like 3D hand-object capture systems to collect more diverse and realistic training data to further improve the model's performance.
Conclusion
The HUP-3D dataset and the associated hand-ultrasound pose estimation model represent a significant advancement in egocentric computer vision for medical applications. By providing a large, diverse, and realistic synthetic dataset, the authors have enabled the development of more robust and accurate 3D pose estimation techniques.
The successful demonstration of the model's ability to jointly estimate the 3D poses of the hand and ultrasound probe highlights the potential of this technology to enable new applications in medical robotics and augmented reality-based surgical guidance. As the research in this area continues to progress, the HUP-3D dataset and the proposed techniques could contribute to improving the safety, precision, and efficiency of medical procedures involving handheld ultrasound devices.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
HUP-3D: A 3D multi-view synthetic dataset for assisted-egocentric hand-ultrasound pose estimation
Manuel Birlo, Razvan Caramalau, Philip J. Eddie Edwards, Brian Dromey, Matthew J. Clarkson, Danail Stoyanov
We present HUP-3D, a 3D multi-view multi-modal synthetic dataset for hand-ultrasound (US) probe pose estimation in the context of obstetric ultrasound. Egocentric markerless 3D joint pose estimation has potential applications in mixed reality based medical education. The ability to understand hand and probe movements programmatically opens the door to tailored guidance and mentoring applications. Our dataset consists of over 31k sets of RGB, depth and segmentation mask frames, including pose related ground truth data, with a strong emphasis on image diversity and complexity. Adopting a camera viewpoint-based sphere concept allows us to capture a variety of views and generate multiple hand grasp poses using a pre-trained network. Additionally, our approach includes a software-based image rendering concept, enhancing diversity with various hand and arm textures, lighting conditions, and background images. Furthermore, we validated our proposed dataset with state-of-the-art learning models and we obtained the lowest hand-object keypoint errors. The dataset and other details are provided with the supplementary material. The source code of our grasp generation and rendering pipeline will be made publicly available.
Read more7/15/2024

0
Introducing HOT3D: An Egocentric Dataset for 3D Hand and Object Tracking
Prithviraj Banerjee, Sindi Shkodrani, Pierre Moulon, Shreyas Hampali, Fan Zhang, Jade Fountain, Edward Miller, Selen Basol, Richard Newcombe, Robert Wang, Jakob Julian Engel, Tomas Hodan
We introduce HOT3D, a publicly available dataset for egocentric hand and object tracking in 3D. The dataset offers over 833 minutes (more than 3.7M images) of multi-view RGB/monochrome image streams showing 19 subjects interacting with 33 diverse rigid objects, multi-modal signals such as eye gaze or scene point clouds, as well as comprehensive ground truth annotations including 3D poses of objects, hands, and cameras, and 3D models of hands and objects. In addition to simple pick-up/observe/put-down actions, HOT3D contains scenarios resembling typical actions in a kitchen, office, and living room environment. The dataset is recorded by two head-mounted devices from Meta: Project Aria, a research prototype of light-weight AR/AI glasses, and Quest 3, a production VR headset sold in millions of units. Ground-truth poses were obtained by a professional motion-capture system using small optical markers attached to hands and objects. Hand annotations are provided in the UmeTrack and MANO formats and objects are represented by 3D meshes with PBR materials obtained by an in-house scanner. We aim to accelerate research on egocentric hand-object interaction by making the HOT3D dataset publicly available and by co-organizing public challenges on the dataset at ECCV 2024. The dataset can be downloaded from the project website: https://facebookresearch.github.io/hot3d/.
Read more6/17/2024
0
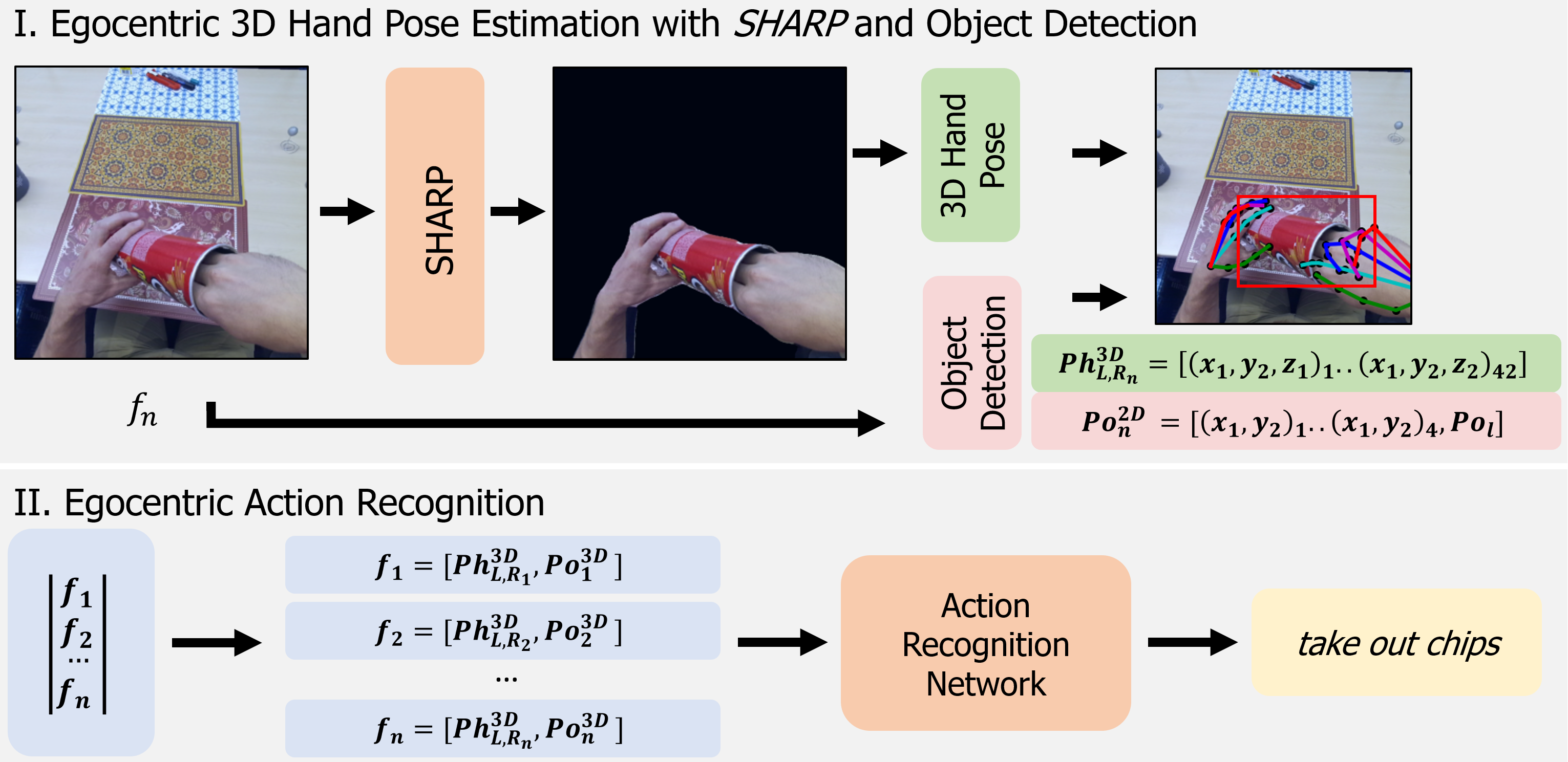
SHARP: Segmentation of Hands and Arms by Range using Pseudo-Depth for Enhanced Egocentric 3D Hand Pose Estimation and Action Recognition
Wiktor Mucha, Michael Wray, Martin Kampel
Hand pose represents key information for action recognition in the egocentric perspective, where the user is interacting with objects. We propose to improve egocentric 3D hand pose estimation based on RGB frames only by using pseudo-depth images. Incorporating state-of-the-art single RGB image depth estimation techniques, we generate pseudo-depth representations of the frames and use distance knowledge to segment irrelevant parts of the scene. The resulting depth maps are then used as segmentation masks for the RGB frames. Experimental results on H2O Dataset confirm the high accuracy of the estimated pose with our method in an action recognition task. The 3D hand pose, together with information from object detection, is processed by a transformer-based action recognition network, resulting in an accuracy of 91.73%, outperforming all state-of-the-art methods. Estimations of 3D hand pose result in competitive performance with existing methods with a mean pose error of 28.66 mm. This method opens up new possibilities for employing distance information in egocentric 3D hand pose estimation without relying on depth sensors.
Read more8/20/2024

0
Benchmarking 2D Egocentric Hand Pose Datasets
Olga Taran, Damian M. Manzone, Jose Zariffa
Hand pose estimation from egocentric video has broad implications across various domains, including human-computer interaction, assistive technologies, activity recognition, and robotics, making it a topic of significant research interest. The efficacy of modern machine learning models depends on the quality of data used for their training. Thus, this work is devoted to the analysis of state-of-the-art egocentric datasets suitable for 2D hand pose estimation. We propose a novel protocol for dataset evaluation, which encompasses not only the analysis of stated dataset characteristics and assessment of data quality, but also the identification of dataset shortcomings through the evaluation of state-of-the-art hand pose estimation models. Our study reveals that despite the availability of numerous egocentric databases intended for 2D hand pose estimation, the majority are tailored for specific use cases. There is no ideal benchmark dataset yet; however, H2O and GANerated Hands datasets emerge as the most promising real and synthetic datasets, respectively.
Read more9/12/2024