Hybrid Intelligent Routing with Optimized Learning (HIROL) for Adaptive Routing Topology management in FANETs
2406.15105
0
0
👀
Abstract
Enhancing the routing efficacy of Flying AdHoc Networks (FANETs), a network of numerous Unmanned Aerial Vehicles (UAVs), in which various challenges may arise as a result of the varied mobility, speed, direction, and rapid topology changes. Given the special features of UAVs, in particular their fast mobility, frequent topology changes, and 3D space movements, it is difficult to transport them through a FANET. The suggested study presents a complete hybrid model: HIROL (Hybrid Intelligent Routing with Optimized Learning) that integrates the ABC (Artificial Bee Colony) algorithm, DSR (Dynamic Source Routing) by incorporating Optimized Link State Routing (OLSR) and ANNs (Artificial Neural Networks) to optimize the routing process. The HIROL optimizes link management by ABC optimization algorithm and reliably analyses link status using characteristics from OLSR and DSR; at the same time, an ANN-based technique successfully classifies connection state. In order to provide optimal route design and maintenance, HIROL dynamically migrates between OLSR and DSR approaches according to the network topology conditions. After running thorough tests in Network Simulator 2 (NS-2), when compared to more conventional DSR and OLSR models, the hybrid model HIROL performs far better in simulations and tests. An increase in throughput (3.5 Mbps vs. 3.2-3.4 Mbps), a decrease in communication overhead (15% vs. 18-20%), and an improvement in Packet Delivery Ratio (97.5% vs. 94-95.5%). These results demonstrate that the suggested HIROL model improves FANET routing performance in different types of networks.
Create account to get full access
Overview
- Addresses the challenges of routing in Flying AdHoc Networks (FANETs), a network of Unmanned Aerial Vehicles (UAVs)
- Presents a hybrid model called HIROL (Hybrid Intelligent Routing with Optimized Learning) to optimize the routing process
- HIROL integrates the Artificial Bee Colony (ABC) algorithm, Dynamic Source Routing (DSR), [Optimized Link State Routing (OLSR)], and Artificial Neural Networks (ANNs)
- Aims to improve throughput, reduce communication overhead, and enhance Packet Delivery Ratio (PDR) compared to conventional routing models
Plain English Explanation
FANETs are networks of UAVs, which can face challenges due to the varied mobility, speed, direction, and rapid topology changes of the UAVs. The proposed HIROL model combines several techniques to optimize the routing process in these dynamic networks.
The ABC algorithm is used to manage the connections between the UAVs, ensuring that the links are optimized. The DSR and OLSR protocols are then used to analyze the status of these links, providing reliable information about the network's condition. Finally, an ANN-based approach is used to classify the state of the connections, allowing the system to adapt the routing strategy accordingly.
By dynamically switching between the DSR and OLSR approaches based on the network topology, HIROL aims to provide the best possible routing performance. Compared to traditional routing models, HIROL demonstrates improvements in throughput, communication overhead, and Packet Delivery Ratio, making it a promising solution for enhancing the efficiency of FANETs.
Technical Explanation
The researchers developed the HIROL model to address the challenges of routing in FANETs, which are characterized by the fast mobility, frequent topology changes, and 3D movements of the UAVs. HIROL integrates several techniques to optimize the routing process:
-
ABC Optimization Algorithm: The ABC algorithm is used to manage the links between the UAVs, ensuring that they are optimized for the network's needs.
-
DSR and OLSR Integration: The Dynamic Source Routing (DSR) protocol is used to reliably analyze the link status, while the [Optimized Link State Routing (OLSR)] protocol provides additional information about the network topology.
-
ANN-based Technique: An Artificial Neural Network (ANN)-based approach is employed to classify the state of the connections, enabling the system to adapt the routing strategy accordingly.
The HIROL model dynamically switches between the DSR and OLSR approaches based on the network topology conditions, aiming to provide the optimal route design and maintenance.
The researchers conducted extensive tests using the Network Simulator 2 (NS-2) and compared the performance of HIROL against more conventional DSR and OLSR models. The results showed that HIROL outperformed the other models, with:
- Increased Throughput: HIROL achieved a throughput of 3.5 Mbps, compared to 3.2-3.4 Mbps for the other models.
- Reduced Communication Overhead: HIROL had a 15% communication overhead, compared to 18-20% for the other models.
- Improved Packet Delivery Ratio (PDR): HIROL achieved a PDR of 97.5%, compared to 94-95.5% for the other models.
These findings demonstrate that the HIROL model can effectively enhance the routing performance in different types of FANETs.
Critical Analysis
The paper presents a comprehensive hybrid model, HIROL, that addresses the unique challenges of routing in Flying AdHoc Networks (FANETs). The integration of the ABC optimization algorithm, DSR and OLSR protocols, and ANN-based techniques is a novel approach that allows the system to dynamically adapt to the network's changing conditions.
However, the paper does not provide much detail on the specific implementation and training of the ANN-based component. More information on the network architecture, hyperparameters, and training process would be helpful to assess the model's complexity and potential for real-world deployment.
Additionally, the paper focuses on evaluating HIROL's performance in simulation using the NS-2 platform. While the results are promising, it would be valuable to see how the model performs in actual FANET scenarios, where additional factors like environmental interference, UAV hardware limitations, and real-world mobility patterns may impact the routing efficiency.
Further research could also explore the scalability of the HIROL model as the number of UAVs and the complexity of the network topology increase. Investigating the model's robustness to node failures, link disruptions, and other real-world challenges would also be an important next step.
Conclusion
The HIROL model presented in this paper offers a promising solution for enhancing the routing efficacy of Flying AdHoc Networks (FANETs). By integrating the ABC optimization algorithm, DSR and OLSR protocols, and ANN-based techniques, the model can dynamically adapt to the unique challenges of UAV networks, such as fast mobility, frequent topology changes, and 3D movements.
The results of the simulation-based experiments demonstrate that HIROL can outperform conventional routing models in terms of throughput, communication overhead, and Packet Delivery Ratio. These improvements could have a significant impact on the performance and reliability of FANET applications, such as UAV-based communication networks, distributed autonomous swarm formations, and hierarchical federated learning systems.
As the adoption of UAV technology continues to grow, solutions like HIROL will play an increasingly important role in enabling robust and efficient communication in these dynamic, 3D environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
New!A Hybrid Reactive Routing Protocol for Decentralized UAV Networks
Shivam Garg, Alexander Ihler, Elizabeth Serena Bentley, Sunil Kumar
0
0
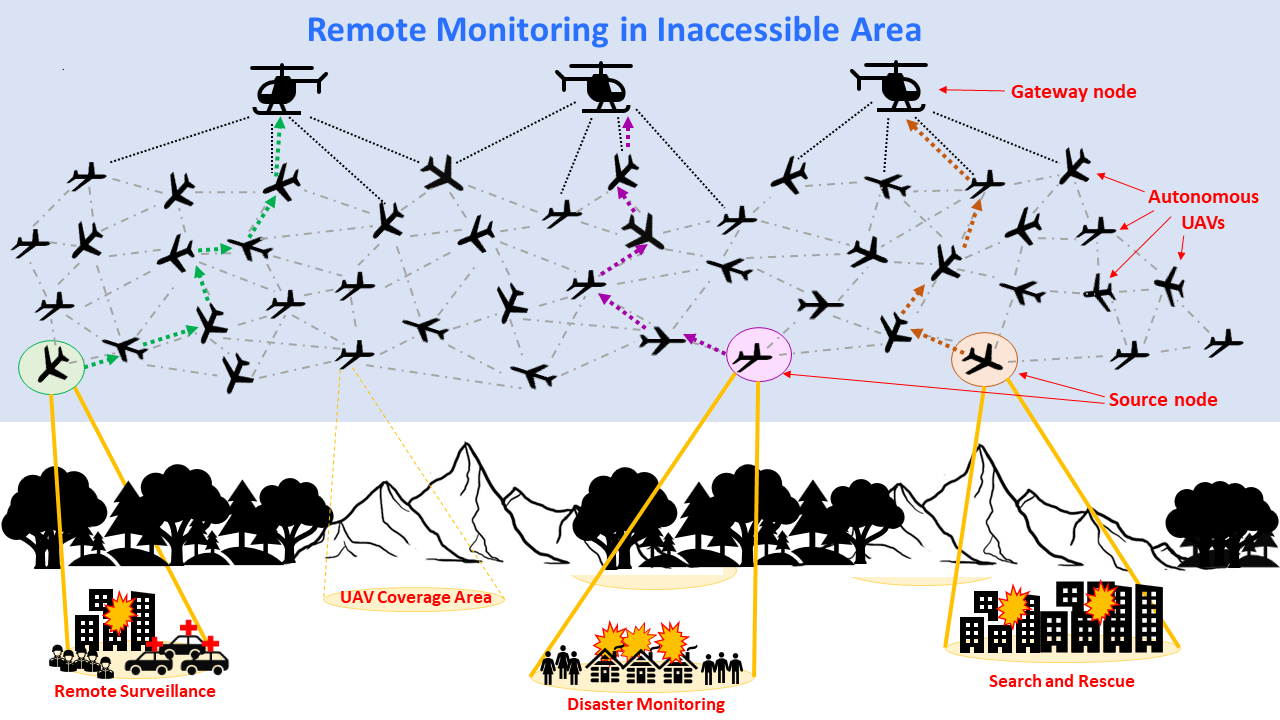
Wireless networks consisting of low SWaP, FW-UAVs are used in many applications, such as monitoring, search and surveillance of inaccessible areas. A decentralized and autonomous approach ensures robustness to failures; the UAVs explore and sense within the area and forward their information, in a multihop manner, to nearby aerial gateway nodes. However, the unpredictable nature of the events, relatively high speed of UAVs, and dynamic UAV trajectories cause the network topology to change significantly over time, resulting in frequent route breaks. A holistic routing approach is needed to support multiple traffic flows in these networks to provide mobility- and congestion-aware, high-quality routes when needed, with low control and computational overheads, using the information collected in a distributed manner. Existing routing schemes do not address all the mentioned issues. We present a hybrid reactive routing protocol for decentralized UAV networks. Our scheme searches routes on-demand, monitors a region around the selected route (the pipe), and proactively switches to an alternative route before the current route's quality degrades below a threshold. We empirically evaluate the impact of pipe width and node density on our ability to find alternate high-quality routes within the pipe and the overhead required to maintain the pipe. Compared to existing reactive routing schemes, our approach achieves higher throughput and reduces the number of route discoveries, overhead, and resulting flow interruptions at different traffic loads, node densities and speeds. Despite having limited network topology information, and low overhead and route computation complexity, our proposed scheme achieves superior throughput to proactive optimized link state routing scheme at different network and traffic settings. We also evaluate the relative performance of reactive and proactive routing schemes.
7/4/2024

Reinforcement-Learning based routing for packet-optical networks with hybrid telemetry
A. L. Garc'ia Navarro, Nataliia Koneva, Alfonso S'anchez-Maci'an, Jos'e Alberto Hern'andez, 'Oscar Gonz'alez de Dios, J. M. Rivas-Moscoso
0
0
This article provides a methodology and open-source implementation of Reinforcement Learning algorithms for finding optimal routes in a packet-optical network scenario. The algorithm uses measurements provided by the physical layer (pre-FEC bit error rate and propagation delay) and the link layer (link load) to configure a set of latency-based rewards and penalties based on such measurements. Then, the algorithm executes Q-learning based on this set of rewards for finding the optimal routing strategies. It is further shown that the algorithm dynamically adapts to changing network conditions by re-calculating optimal policies upon either link load changes or link degradation as measured by pre-FEC BER.
6/24/2024

Multi-UAV Multi-RIS QoS-Aware Aerial Communication Systems using DRL and PSO
Marwan Dhuheir, Aiman Erbad, Ala Al-Fuqaha, Mohsen Guizani
0
0
Recently, Unmanned Aerial Vehicles (UAVs) have attracted the attention of researchers in academia and industry for providing wireless services to ground users in diverse scenarios like festivals, large sporting events, natural and man-made disasters due to their advantages in terms of versatility and maneuverability. However, the limited resources of UAVs (e.g., energy budget and different service requirements) can pose challenges for adopting UAVs for such applications. Our system model considers a UAV swarm that navigates an area, providing wireless communication to ground users with RIS support to improve the coverage of the UAVs. In this work, we introduce an optimization model with the aim of maximizing the throughput and UAVs coverage through optimal path planning of UAVs and multi-RIS phase configurations. The formulated optimization is challenging to solve using standard linear programming techniques, limiting its applicability in real-time decision-making. Therefore, we introduce a two-step solution using deep reinforcement learning and particle swarm optimization. We conduct extensive simulations and compare our approach to two competitive solutions presented in the recent literature. Our simulation results demonstrate that our adopted approach is 20 % better than the brute-force approach and 30% better than the baseline solution in terms of QoS.
6/26/2024

Distributed Autonomous Swarm Formation for Dynamic Network Bridging
Raffaele Galliera, Thies Mohlenhof, Alessandro Amato, Daniel Duran, Kristen Brent Venable, Niranjan Suri
0
0
Effective operation and seamless cooperation of robotic systems are a fundamental component of next-generation technologies and applications. In contexts such as disaster response, swarm operations require coordinated behavior and mobility control to be handled in a distributed manner, with the quality of the agents' actions heavily relying on the communication between them and the underlying network. In this paper, we formulate the problem of dynamic network bridging in a novel Decentralized Partially Observable Markov Decision Process (Dec-POMDP), where a swarm of agents cooperates to form a link between two distant moving targets. Furthermore, we propose a Multi-Agent Reinforcement Learning (MARL) approach for the problem based on Graph Convolutional Reinforcement Learning (DGN) which naturally applies to the networked, distributed nature of the task. The proposed method is evaluated in a simulated environment and compared to a centralized heuristic baseline showing promising results. Moreover, a further step in the direction of sim-to-real transfer is presented, by additionally evaluating the proposed approach in a near Live Virtual Constructive (LVC) UAV framework.
4/3/2024