A Hybrid Reactive Routing Protocol for Decentralized UAV Networks

0
Sign in to get full access
Introduction
This research paper proposes a hybrid reactive routing protocol for decentralized UAV (Unmanned Aerial Vehicle) networks. UAV networks are becoming increasingly important for various applications, such as surveillance, disaster response, and delivery services. However, traditional routing protocols may not be well-suited for the dynamic and decentralized nature of UAV networks, which can face challenges like frequent topology changes and limited communication range.
The key idea behind the proposed protocol is to combine the strengths of two popular routing approaches: ad-hoc on-demand distance vector (AODV) and proactive routing. AODV is a reactive protocol that establishes routes only when needed, reducing overhead, while proactive routing maintains a routing table for faster route discovery. By blending these techniques, the authors aim to create a more efficient and resilient routing solution for decentralized UAV networks.
Related Work
The paper situates its contribution within the broader context of research on UAV network routing and coordination. It discusses several related works, including those on pipe-routing topology control for UAV networks, reactive composition of UAV delivery services in urban environments, swarm UAV communication, and secure and reliable heterogeneous real-time telemetry for UAVs. These studies highlight the various challenges and approaches in designing effective routing protocols for decentralized UAV networks.
Technical Explanation
The proposed hybrid reactive routing protocol combines the on-demand route discovery of AODV with the proactive maintenance of routing tables. When a source node needs to send data to a destination, it first checks its routing table for a valid route. If a route is found, the data is forwarded immediately. If not, the node initiates a route discovery process, similar to AODV, to find a path to the destination.
To maintain the routing tables, each node periodically broadcasts a "hello" message to its neighbors, gathering information about the network topology. This proactive approach ensures that the routing tables are kept up-to-date, reducing the need for frequent route discoveries and improving overall network performance.
The authors also introduce a mechanism to handle node mobility and topology changes. When a node detects a change in its neighborhood, it updates its routing table and propagates the changes to its neighbors. This allows the network to adapt quickly to dynamic conditions, ensuring reliable data delivery.
Critical Analysis
The paper presents a well-designed hybrid routing protocol that addresses the unique challenges of decentralized UAV networks. By combining reactive and proactive techniques, the proposed solution aims to achieve a balance between efficient route discovery and maintenance of up-to-date routing information.
One potential limitation mentioned in the paper is the impact of the periodic "hello" messages on network overhead and energy consumption, especially in networks with a large number of UAVs. The authors suggest exploring adaptive strategies to optimize the frequency of these messages based on network conditions, which could be an area for further research.
Additionally, the paper does not delve into the security implications of the proposed protocol. In real-world UAV networks, ensuring the integrity and confidentiality of data transmissions is crucial, and future research could investigate mechanisms to enhance the security of the routing process.
Conclusion
The hybrid reactive routing protocol presented in this paper offers a promising approach to address the challenges of decentralized UAV networks. By leveraging the strengths of both reactive and proactive routing techniques, the protocol aims to provide efficient and resilient data delivery, which is essential for various UAV applications.
The research contributes to the ongoing efforts to develop robust and adaptive routing solutions for the dynamic and complex environments in which UAVs operate. As the use of UAVs continues to grow, this work and similar advancements in decentralized UAV network protocols can have far-reaching implications for the future of aerial transportation, emergency response, and other critical applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Hybrid Reactive Routing Protocol for Decentralized UAV Networks
Shivam Garg, Alexander Ihler, Elizabeth Serena Bentley, Sunil Kumar
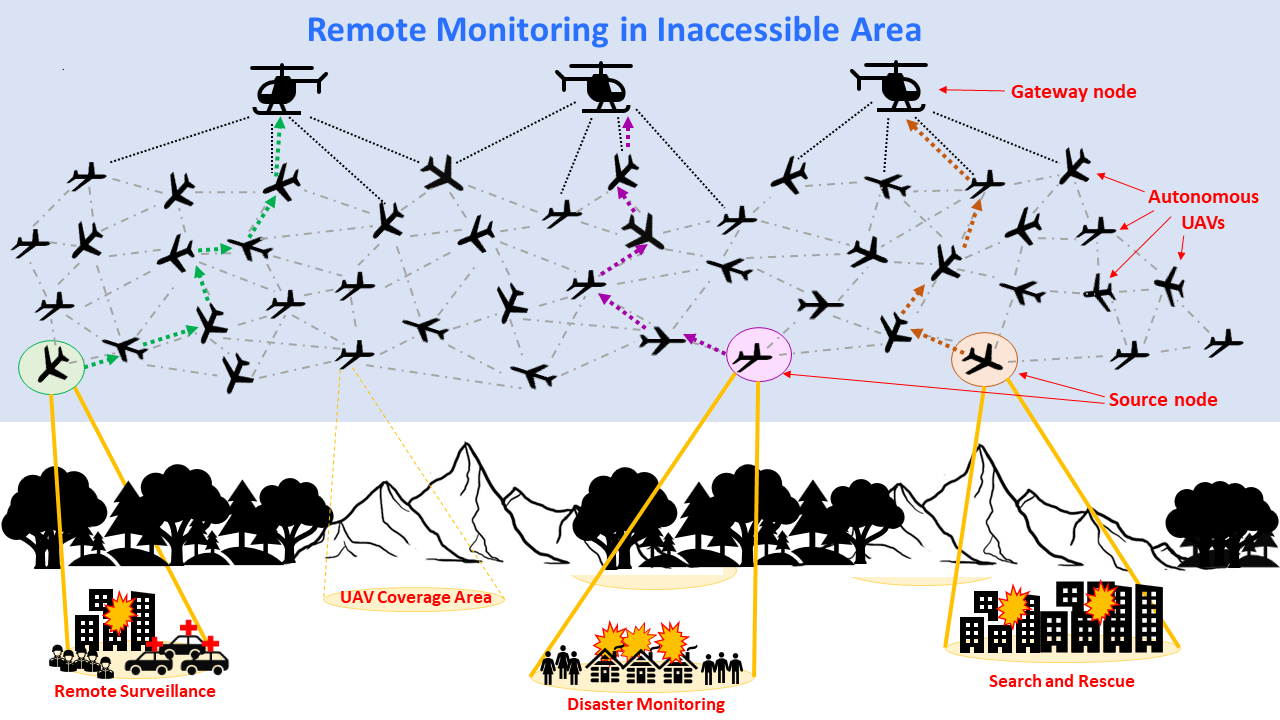
Wireless networks consisting of low SWaP, FW-UAVs are used in many applications, such as monitoring, search and surveillance of inaccessible areas. A decentralized and autonomous approach ensures robustness to failures; the UAVs explore and sense within the area and forward their information, in a multihop manner, to nearby aerial gateway nodes. However, the unpredictable nature of the events, relatively high speed of UAVs, and dynamic UAV trajectories cause the network topology to change significantly over time, resulting in frequent route breaks. A holistic routing approach is needed to support multiple traffic flows in these networks to provide mobility- and congestion-aware, high-quality routes when needed, with low control and computational overheads, using the information collected in a distributed manner. Existing routing schemes do not address all the mentioned issues. We present a hybrid reactive routing protocol for decentralized UAV networks. Our scheme searches routes on-demand, monitors a region around the selected route (the pipe), and proactively switches to an alternative route before the current route's quality degrades below a threshold. We empirically evaluate the impact of pipe width and node density on our ability to find alternate high-quality routes within the pipe and the overhead required to maintain the pipe. Compared to existing reactive routing schemes, our approach achieves higher throughput and reduces the number of route discoveries, overhead, and resulting flow interruptions at different traffic loads, node densities and speeds. Despite having limited network topology information, and low overhead and route computation complexity, our proposed scheme achieves superior throughput to proactive optimized link state routing scheme at different network and traffic settings. We also evaluate the relative performance of reactive and proactive routing schemes.
Read more7/4/2024
📊
0
Pipe Routing with Topology Control for UAV Networks
Shreyas Devaraju, Shivam Garg, Alexander Ihler, Sunil Kumar
Routing protocols help in transmitting the sensed data from UAVs monitoring the targets (called target UAVs) to the BS. However, the highly dynamic nature of an autonomous, decentralized UAV network leads to frequent route breaks or traffic disruptions. Traditional routing schemes cannot quickly adapt to dynamic UAV networks and/or incur large control overhead and delays. To establish stable, high-quality routes from target UAVs to the BS, we design a hybrid reactive routing scheme called pipe routing that is mobility, congestion, and energy-aware. The pipe routing scheme discovers routes on-demand and proactively switches to alternate high-quality routes within a limited region around the active routes (called the pipe) when needed, reducing the number of route breaks and increasing data throughput. We then design a novel topology control-based pipe routing scheme to maintain robust connectivity in the pipe region around the active routes, leading to improved route stability and increased throughput with minimal impact on the coverage performance of the UAV network.
Read more5/9/2024
0
Improved Q-learning based Multi-hop Routing for UAV-Assisted Communication
N P Sharvari, Dibakar Das, Jyotsna Bapat, Debabrata Das
Designing effective Unmanned Aerial Vehicle(UAV)-assisted routing protocols is challenging due to changing topology, limited battery capacity, and the dynamic nature of communication environments. Current protocols prioritize optimizing individual network parameters, overlooking the necessity for a nuanced approach in scenarios with intermittent connectivity, fluctuating signal strength, and varying network densities, ultimately failing to address aerial network requirements comprehensively. This paper proposes a novel, Improved Q-learning-based Multi-hop Routing (IQMR) algorithm for optimal UAV-assisted communication systems. Using Q(lambda) learning for routing decisions, IQMR substantially enhances energy efficiency and network data throughput. IQMR improves system resilience by prioritizing reliable connectivity and inter-UAV collision avoidance while integrating real-time network status information, all in the absence of predefined UAV path planning, thus ensuring dynamic adaptability to evolving network conditions. The results validate IQMR's adaptability to changing system conditions and superiority over the current techniques. IQMR showcases 36.35% and 32.05% improvements in energy efficiency and data throughput over the existing methods.
Read more8/20/2024
🤔
0
Reactive Composition of UAV Delivery Services in Urban Environments
Woojin Lee, Babar Shahzaad, Balsam Alkouz, Athman Bouguettaya
We propose a novel failure-aware reactive UAV delivery service composition framework. A skyway network infrastructure is presented for the effective provisioning of services in urban areas. We present a formal drone delivery service model and a system architecture for reactive drone delivery services. We develop radius-based, cell density-based, and two-phased algorithms to reduce the search space and perform reactive service compositions when a service failure occurs. We conduct a set of experiments with a real drone dataset to demonstrate the effectiveness of our proposed approach.
Read more4/30/2024