Informational Embodiment: Computational role of information structure in codes and robots

0

Sign in to get full access
Overview
- This paper explores the role of information structure in computational systems, including codes and robots.
- It examines how the physical embodiment and structure of a system can impact its information processing capabilities.
- The research aims to provide insights into the relationship between the physical and computational aspects of intelligent systems.
Plain English Explanation
The paper discusses the idea of "informational embodiment" - how the physical structure and embodiment of a computational system can shape its information processing capabilities. The key idea is that the physical form and structure of a system, such as a robot or a biological organism, can influence how information is encoded, transmitted, and processed within that system.
For example, the body as an information channel - the way a robot's body is designed can affect how information flows through it, much like the way a communication channel affects the transmission of information. Similarly, morphological computation - the idea that the physical structure of a system can offload some computational work, reducing the burden on the "brain" or control system.
The paper explores these concepts and their implications for the design and understanding of intelligent systems, whether artificial or biological. By considering the interplay between the physical and computational aspects of a system, the researchers aim to gain new insights into the fundamental principles of information processing and intelligence.
Technical Explanation
The paper presents a theoretical framework for understanding the role of information structure in computational systems, including both artificial codes and robotic systems. It draws on concepts from information theory, cybernetics, and embodied cognition to explore how the physical embodiment and morphology of a system can shape its information processing capabilities.
One key idea is the notion of the "body as an information channel" - the idea that the physical structure and dynamics of a system's embodiment can act as a channel for the transmission and transformation of information, much like a communication channel in information theory. The paper discusses how this can lead to "morphological computation", where the physical structure of a system offloads some computational work from the control system.
The paper also explores how the information structure of codes, including biological genetic codes, can be shaped by the physical and computational constraints of the embodied systems that use them. It connects this to the "internal model principle" - the idea that intelligent systems must build internal models of their environment and embodiment in order to effectively interact with the world.
Overall, the paper aims to provide a theoretical foundation for understanding the intimate relationship between the physical and computational aspects of intelligent systems, with potential implications for the design of artificial systems and the study of biological intelligence.
Critical Analysis
The paper presents a compelling theoretical framework for understanding the role of information structure in computational systems, but it acknowledges several limitations and areas for further research.
One key limitation is the difficulty of empirically validating the ideas presented, as they often rely on abstract concepts and theoretical principles rather than direct experimental evidence. The paper notes the need for more research into the "neural information organizing and processing" capabilities of embodied systems to better understand these phenomena.
Additionally, the paper focuses primarily on the informational aspects of embodiment, but does not delve deeply into the physical and material constraints that may also shape the design and capabilities of computational systems. A more comprehensive survey of the "alignment between cyber-space and physical-world" could provide additional insights.
Overall, the paper presents a thought-provoking theoretical framework that encourages researchers and designers to consider the interplay between the physical and computational aspects of intelligent systems. While further empirical validation is needed, the ideas outlined in the paper could have significant implications for the development of more effective and adaptable artificial systems.
Conclusion
This paper explores the concept of "informational embodiment" - the idea that the physical structure and embodiment of a computational system can shape its information processing capabilities. By drawing on principles from information theory, cybernetics, and embodied cognition, the researchers present a theoretical framework for understanding how the body can act as an information channel and enable "morphological computation."
The paper suggests that considering the interplay between the physical and computational aspects of a system is crucial for designing effective and adaptable intelligent systems, whether artificial or biological. While further empirical research is needed to validate the ideas presented, the paper offers a compelling perspective on the fundamental relationship between the physical and informational aspects of intelligence.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Informational Embodiment: Computational role of information structure in codes and robots
Alexandre Pitti, Kohei Nakajima, Yasuo Kuniyoshi
The body morphology plays an important role in the way information is perceived and processed by an agent. We address an information theory (IT) account on how the precision of sensors, the accuracy of motors, their placement, the body geometry, shape the information structure in robots and computational codes. As an original idea, we envision the robot's body as a physical communication channel through which information is conveyed, in and out, despite intrinsic noise and material limitations. Following this, entropy, a measure of information and uncertainty, can be used to maximize the efficiency of robot design and of algorithmic codes per se. This is known as the principle of Entropy Maximization (PEM) introduced in biology by Barlow in 1969. The Shannon's source coding theorem provides then a framework to compare different types of bodies in terms of sensorimotor information. In line with PME, we introduce a special class of efficient codes used in IT that reached the Shannon limits in terms of information capacity for error correction and robustness against noise, and parsimony. These efficient codes, which exploit insightfully quantization and randomness, permit to deal with uncertainty, redundancy and compacity. These features can be used for perception and control in intelligent systems. In various examples and closing discussions, we reflect on the broader implications of our framework that we called Informational Embodiment to motor theory and bio-inspired robotics, touching upon concepts like motor synergies, reservoir computing, and morphological computation. These insights can contribute to a deeper understanding of how information theory intersects with the embodiment of intelligence in both natural and artificial systems.
Read more8/26/2024
0
Body Transformer: Leveraging Robot Embodiment for Policy Learning
Carmelo Sferrazza, Dun-Ming Huang, Fangchen Liu, Jongmin Lee, Pieter Abbeel
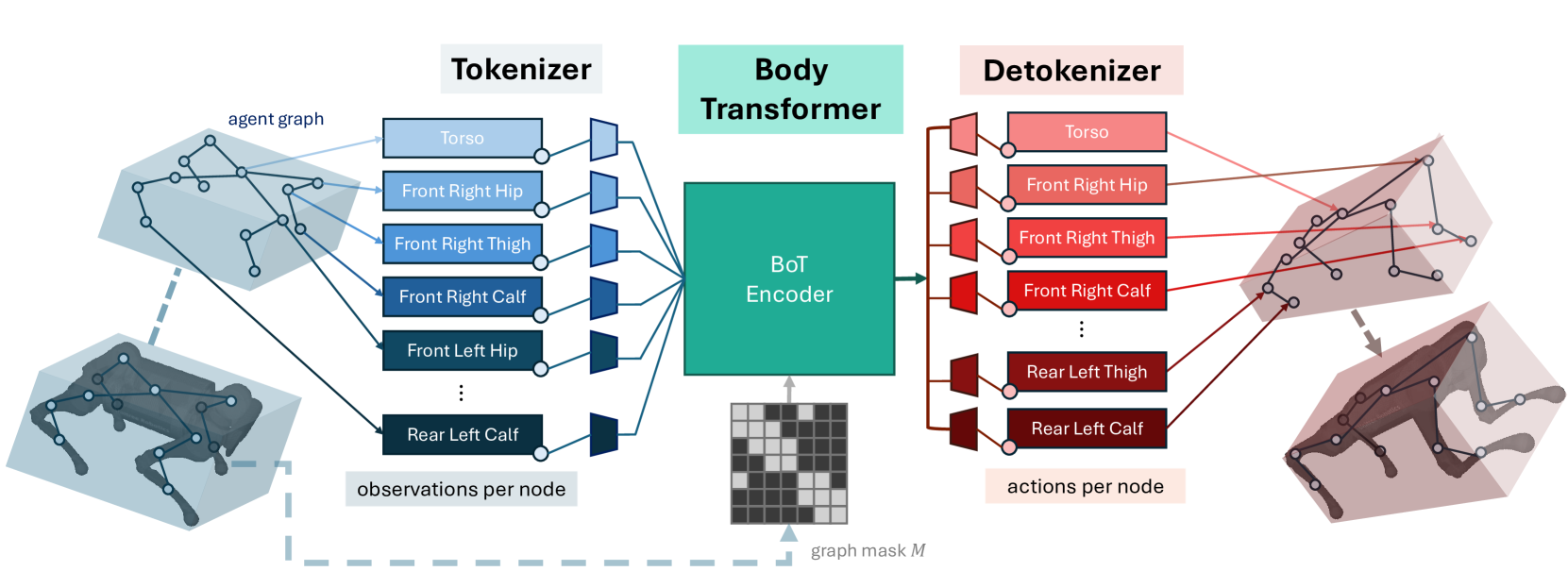
In recent years, the transformer architecture has become the de facto standard for machine learning algorithms applied to natural language processing and computer vision. Despite notable evidence of successful deployment of this architecture in the context of robot learning, we claim that vanilla transformers do not fully exploit the structure of the robot learning problem. Therefore, we propose Body Transformer (BoT), an architecture that leverages the robot embodiment by providing an inductive bias that guides the learning process. We represent the robot body as a graph of sensors and actuators, and rely on masked attention to pool information throughout the architecture. The resulting architecture outperforms the vanilla transformer, as well as the classical multilayer perceptron, in terms of task completion, scaling properties, and computational efficiency when representing either imitation or reinforcement learning policies. Additional material including the open-source code is available at https://sferrazza.cc/bot_site.
Read more8/13/2024

0
No-brainer: Morphological Computation driven Adaptive Behavior in Soft Robots
Alican Mertan, Nick Cheney
It is prevalent in contemporary AI and robotics to separately postulate a brain modeled by neural networks and employ it to learn intelligent and adaptive behavior. While this method has worked very well for many types of tasks, it isn't the only type of intelligence that exists in nature. In this work, we study the ways in which intelligent behavior can be created without a separate and explicit brain for robot control, but rather solely as a result of the computation occurring within the physical body of a robot. Specifically, we show that adaptive and complex behavior can be created in voxel-based virtual soft robots by using simple reactive materials that actively change the shape of the robot, and thus its behavior, under different environmental cues. We demonstrate a proof of concept for the idea of closed-loop morphological computation, and show that in our implementation, it enables behavior mimicking logic gates, enabling us to demonstrate how such behaviors may be combined to build up more complex collective behaviors.
Read more7/24/2024

0
Aligning Cyber Space with Physical World: A Comprehensive Survey on Embodied AI
Yang Liu, Weixing Chen, Yongjie Bai, Guanbin Li, Wen Gao, Liang Lin
Embodied Artificial Intelligence (Embodied AI) is crucial for achieving Artificial General Intelligence (AGI) and serves as a foundation for various applications that bridge cyberspace and the physical world. Recently, the emergence of Multi-modal Large Models (MLMs) and World Models (WMs) have attracted significant attention due to their remarkable perception, interaction, and reasoning capabilities, making them a promising architecture for the brain of embodied agents. However, there is no comprehensive survey for Embodied AI in the era of MLMs. In this survey, we give a comprehensive exploration of the latest advancements in Embodied AI. Our analysis firstly navigates through the forefront of representative works of embodied robots and simulators, to fully understand the research focuses and their limitations. Then, we analyze four main research targets: 1) embodied perception, 2) embodied interaction, 3) embodied agent, and 4) sim-to-real adaptation, covering the state-of-the-art methods, essential paradigms, and comprehensive datasets. Additionally, we explore the complexities of MLMs in virtual and real embodied agents, highlighting their significance in facilitating interactions in dynamic digital and physical environments. Finally, we summarize the challenges and limitations of embodied AI and discuss their potential future directions. We hope this survey will serve as a foundational reference for the research community and inspire continued innovation. The associated project can be found at https://github.com/HCPLab-SYSU/Embodied_AI_Paper_List.
Read more7/23/2024