Intention-based and Risk-Aware Trajectory Prediction for Autonomous Driving in Complex Traffic Scenarios

0
Sign in to get full access
Overview
- This paper presents a novel intention-based and risk-aware trajectory prediction model for autonomous driving in complex traffic scenarios.
- The model aims to accurately predict the future trajectories of surrounding vehicles while considering their intentions and the associated risks.
- It combines a hierarchical intention-aware prediction module with a risk-aware optimization module to generate safe and efficient driving decisions.
Plain English Explanation
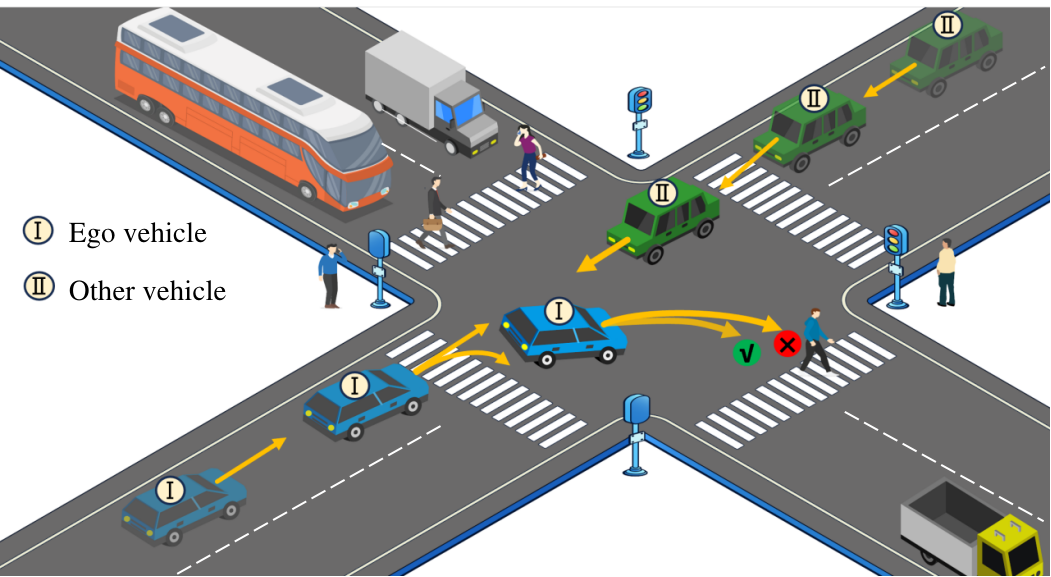
The paper describes a new system for autonomous vehicles to predict the future movements of other cars on the road. When driving in busy or complex traffic situations, it's crucial for self-driving cars to be able to anticipate what the other vehicles around them might do next. This helps the autonomous car make safe and effective driving decisions.
The researchers' model works in two main steps. First, it tries to understand the "intentions" of the other vehicles - that is, what the driver of each car is likely trying to do, like turning, changing lanes, or continuing straight. By recognizing these intentions, the model can make more accurate predictions about the vehicle's future trajectory.
Second, the model also considers the "risks" associated with each predicted trajectory. It evaluates how dangerous or risky a particular path might be, based on factors like the proximity to other cars, pedestrians, or obstacles. This risk-awareness allows the autonomous vehicle to select the safest and most appropriate driving actions.
By combining these intention-based predictions and risk-aware evaluations, the researchers' model aims to enable autonomous cars to navigate complex traffic scenarios more safely and efficiently than previous approaches.
Technical Explanation
The paper proposes an intention-based and risk-aware trajectory prediction model for autonomous driving. The model consists of two main components:
-
Hierarchical Intention-Aware Prediction Module: This module first identifies the high-level intentions of surrounding vehicles, such as lane changing, turning, or lane following. It then uses this intention information to predict the vehicles' future trajectories more accurately.
-
Risk-Aware Optimization Module: This module evaluates the predicted trajectories and selects the one that minimizes the associated risks, such as collision probability and comfort levels. It uses a risk-aware optimization process to generate the final trajectory for the autonomous vehicle.
The researchers evaluate their model on real-world autonomous driving datasets and show that it outperforms previous state-of-the-art techniques in terms of prediction accuracy and safety-critical metrics.
Critical Analysis
The paper provides a thorough evaluation of the proposed model and discusses several limitations and future research directions:
- The model's performance may be sensitive to errors in the intention recognition module, which could lead to cascading issues in the trajectory prediction.
- The risk evaluation considers a limited set of factors, and incorporating a more comprehensive risk assessment (e.g., including pedestrian and cyclist interactions) could further improve the model's safety.
- The model is evaluated in simulation environments, and testing its performance in real-world autonomous driving scenarios would be an important next step.
- Extending the model to handle more complex traffic situations, such as multi-agent interactions and temporary obstacles, could enhance its applicability in diverse driving conditions.
Overall, the paper presents a promising approach to trajectory prediction that balances intention-awareness and risk-awareness, but there are opportunities to further refine and expand the model's capabilities.
Conclusion
This paper introduces an intention-based and risk-aware trajectory prediction model for autonomous driving in complex traffic scenarios. By combining intention recognition and risk-aware optimization, the model aims to generate safe and efficient driving decisions that account for the diverse behaviors and potential dangers in the surrounding environment. While the evaluation shows promising results, the researchers also identify areas for future improvement, such as enhancing the risk assessment and expanding the model's capabilities to handle more complex traffic situations. This work contributes to the ongoing efforts to develop robust and reliable autonomous driving systems that can navigate safely in dynamic and unpredictable environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Intention-based and Risk-Aware Trajectory Prediction for Autonomous Driving in Complex Traffic Scenarios
Wen Wei, Jiankun Wang
Accurately predicting the trajectory of surrounding vehicles is a critical challenge for autonomous vehicles. In complex traffic scenarios, there are two significant issues with the current autonomous driving system: the cognitive uncertainty of prediction and the lack of risk awareness, which limit the further development of autonomous driving. To address this challenge, we introduce a novel trajectory prediction model that incorporates insights and principles from driving behavior, ethical decision-making, and risk assessment. Based on joint prediction, our model consists of interaction, intention, and risk assessment modules. The dynamic variation of interaction between vehicles can be comprehensively captured at each timestamp in the interaction module. Based on interaction information, our model considers primary intentions for vehicles to enhance the diversity of trajectory generation. The optimization of predicted trajectories follows the advanced risk-aware decision-making principles. Experimental results are evaluated on the DeepAccident dataset; our approach shows its remarkable prediction performance on normal and accident scenarios and outperforms the state-of-the-art algorithms by at least 28.9% and 26.5%, respectively. The proposed model improves the proficiency and adaptability of trajectory prediction in complex traffic scenarios. The code for the proposed model is available at https://sites.google.com/view/ir-prediction.
Read more9/25/2024
🔮
0
Risk-Aware Vehicle Trajectory Prediction Under Safety-Critical Scenarios
Qingfan Wang, Dongyang Xu, Gaoyuan Kuang, Chen Lv, Shengbo Eben Li, Bingbing Nie
Trajectory prediction is significant for intelligent vehicles to achieve high-level autonomous driving, and a lot of relevant research achievements have been made recently. Despite the rapid development, most existing studies solely focused on normal safe scenarios while largely neglecting safety-critical scenarios, particularly those involving imminent collisions. This oversight may result in autonomous vehicles lacking the essential predictive ability in such situations, posing a significant threat to safety. To tackle these, this paper proposes a risk-aware trajectory prediction framework tailored to safety-critical scenarios. Leveraging distinctive hazardous features, we develop three core risk-aware components. First, we introduce a risk-incorporated scene encoder, which augments conventional encoders with quantitative risk information to achieve risk-aware encoding of hazardous scene contexts. Next, we incorporate endpoint-risk-combined intention queries as prediction priors in the decoder to ensure that the predicted multimodal trajectories cover both various spatial intentions and risk levels. Lastly, an auxiliary risk prediction task is implemented for the ultimate risk-aware prediction. Furthermore, to support model training and performance evaluation, we introduce a safety-critical trajectory prediction dataset and tailored evaluation metrics. We conduct comprehensive evaluations and compare our model with several SOTA models. Results demonstrate the superior performance of our model, with a significant improvement in most metrics. This prediction advancement enables autonomous vehicles to execute correct collision avoidance maneuvers under safety-critical scenarios, eventually enhancing road traffic safety.
Read more7/19/2024
🔮
0
A Cognitive-Driven Trajectory Prediction Model for Autonomous Driving in Mixed Autonomy Environment
Haicheng Liao, Zhenning Li, Chengyue Wang, Bonan Wang, Hanlin Kong, Yanchen Guan, Guofa Li, Zhiyong Cui, Chengzhong Xu
As autonomous driving technology progresses, the need for precise trajectory prediction models becomes paramount. This paper introduces an innovative model that infuses cognitive insights into trajectory prediction, focusing on perceived safety and dynamic decision-making. Distinct from traditional approaches, our model excels in analyzing interactions and behavior patterns in mixed autonomy traffic scenarios. It represents a significant leap forward, achieving marked performance improvements on several key datasets. Specifically, it surpasses existing benchmarks with gains of 16.2% on the Next Generation Simulation (NGSIM), 27.4% on the Highway Drone (HighD), and 19.8% on the Macao Connected Autonomous Driving (MoCAD) dataset. Our proposed model shows exceptional proficiency in handling corner cases, essential for real-world applications. Moreover, its robustness is evident in scenarios with missing or limited data, outperforming most of the state-of-the-art baselines. This adaptability and resilience position our model as a viable tool for real-world autonomous driving systems, heralding a new standard in vehicle trajectory prediction for enhanced safety and efficiency.
Read more4/29/2024
🔮
0
Risk-aware Trajectory Prediction by Incorporating Spatio-temporal Traffic Interaction Analysis
Divya Thuremella, Lewis Ince, Lars Kunze
To operate in open-ended environments where humans interact in complex, diverse ways, autonomous robots must learn to predict their behaviour, especially when that behavior is potentially dangerous to other agents or to the robot. However, reducing the risk of accidents requires prior knowledge of where potential collisions may occur and how. Therefore, we propose to gain this information by analyzing locations and speeds that commonly correspond to high-risk interactions within the dataset, and use it within training to generate better predictions in high risk situations. Through these location-based and speed-based re-weighting techniques, we achieve improved overall performance, as measured by most-likely FDE and KDE, as well as improved performance on high-speed vehicles, and vehicles within high-risk locations. 2023 IEEE International Conference on Robotics and Automation (ICRA)
Read more7/16/2024