Interactive Perception for Deformable Object Manipulation

0

Sign in to get full access
Overview
- This paper explores the challenge of manipulating deformable objects, such as cloth or dough, using interactive perception techniques.
- It proposes a framework that combines sensing, reasoning, and action planning to enable robots to effectively interact with and manipulate deformable objects.
- The research builds on prior work in areas like soft contact simulation, simultaneous perception and interaction, and cross-modal perception.
Plain English Explanation
Manipulating deformable objects like cloth or dough is a challenging task for robots. These objects can change shape in complex ways, making it difficult for a robot to understand and predict how they will respond to its actions.
This research proposes a framework that aims to help robots overcome these challenges. The key idea is to combine different sensing modalities, like vision and touch, to build a more comprehensive understanding of the object and how it will behave. The robot can then use this information to plan its actions more effectively.
For example, a robot might use cameras to visually observe the cloth, while also using tactile sensors in its gripper to feel the cloth's texture and softness. By integrating this information, the robot can better predict how the cloth will deform and fold as it tries to pick it up or manipulate it. This allows the robot to plan its movements more precisely and successfully complete the task.
The researchers build on previous work in areas like soft contact simulation, which helps robots model the physics of deformable objects, and cross-modal perception, which explores how robots can combine different sensory inputs to gain a more holistic understanding of their environment.
Technical Explanation
The paper presents a framework for interactive perception and manipulation of deformable objects. The key components of the framework are:
-
Sensing: The system uses a combination of vision (e.g., RGB-D cameras) and touch (e.g., tactile sensors in the robot's gripper) to build a comprehensive understanding of the object and its state.
-
Reasoning: The system integrates the sensory inputs and uses physics-based models, as well as machine learning techniques like simultaneous perception and interaction, to reason about the object's properties and predict how it will deform and respond to the robot's actions.
-
Action Planning: Based on its understanding of the object and the task, the system plans a sequence of actions the robot should take to manipulate the object in the desired way. This planning process leverages techniques like learning-based manipulation and dynamic robot-assisted hand-object interaction.
The researchers evaluate their framework through a series of experiments, demonstrating the robot's ability to successfully manipulate deformable objects like cloth and dough in various tasks.
Critical Analysis
The paper presents a comprehensive approach to interactive perception and manipulation of deformable objects, which is an important and challenging problem in robotics. The researchers have built upon previous work in related areas and demonstrated the effectiveness of their framework through experiments.
One potential limitation of the approach is the reliance on physics-based models and machine learning techniques, which may not always be able to capture the full complexity of real-world deformable objects. There may be cases where the system's predictions are inaccurate, leading to failed manipulation attempts.
Additionally, the paper does not explore the scalability of the framework to more complex or dynamic deformable objects, or to scenarios with multiple objects or obstacles. Further research would be needed to understand the limitations and potential areas for improvement.
Overall, the paper makes a valuable contribution to the field of deformable object manipulation, and the proposed framework could serve as a foundation for future work in this area.
Conclusion
This research proposes a novel framework for interactive perception and manipulation of deformable objects, such as cloth and dough. By combining sensing, reasoning, and action planning, the system enables robots to effectively interact with and manipulate these types of objects, which have traditionally been challenging for robotic systems.
The key innovation is the integration of multiple sensory modalities, including vision and touch, to build a more comprehensive understanding of the object and its behavior. This, in turn, allows the robot to plan its actions more precisely and successfully complete manipulation tasks.
The successful demonstration of the framework's capabilities through experiments suggests that it could have significant implications for a wide range of applications, from household robotics to industrial manufacturing. Further research may explore ways to enhance the framework's scalability and robustness to address more complex deformable object scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Interactive Perception for Deformable Object Manipulation
Zehang Weng, Peng Zhou, Hang Yin, Alexander Kravberg, Anastasiia Varava, David Navarro-Alarcon, Danica Kragic
Interactive perception enables robots to manipulate the environment and objects to bring them into states that benefit the perception process. Deformable objects pose challenges to this due to significant manipulation difficulty and occlusion in vision-based perception. In this work, we address such a problem with a setup involving both an active camera and an object manipulator. Our approach is based on a sequential decision-making framework and explicitly considers the motion regularity and structure in coupling the camera and manipulator. We contribute a method for constructing and computing a subspace, called Dynamic Active Vision Space (DAVS), for effectively utilizing the regularity in motion exploration. The effectiveness of the framework and approach are validated in both a simulation and a real dual-arm robot setup. Our results confirm the necessity of an active camera and coordinative motion in interactive perception for deformable objects.
Read more6/12/2024

0
Towards Interpretable Visuo-Tactile Predictive Models for Soft Robot Interactions
Enrico Donato, Thomas George Thuruthel, Egidio Falotico
Autonomous systems face the intricate challenge of navigating unpredictable environments and interacting with external objects. The successful integration of robotic agents into real-world situations hinges on their perception capabilities, which involve amalgamating world models and predictive skills. Effective perception models build upon the fusion of various sensory modalities to probe the surroundings. Deep learning applied to raw sensory modalities offers a viable option. However, learning-based perceptive representations become difficult to interpret. This challenge is particularly pronounced in soft robots, where the compliance of structures and materials makes prediction even harder. Our work addresses this complexity by harnessing a generative model to construct a multi-modal perception model for soft robots and to leverage proprioceptive and visual information to anticipate and interpret contact interactions with external objects. A suite of tools to interpret the perception model is furnished, shedding light on the fusion and prediction processes across multiple sensory inputs after the learning phase. We will delve into the outlooks of the perception model and its implications for control purposes.
Read more7/26/2024
0
Soft Contact Simulation and Manipulation Learning of Deformable Objects with Vision-based Tactile Sensor
Jianhua Shan, Yuhao Sun, Shixin Zhang, Fuchun Sun, Zixi Chen, Zirong Shen, Cesare Stefanini, Yiyong Yang, Shan Luo, Bin Fang
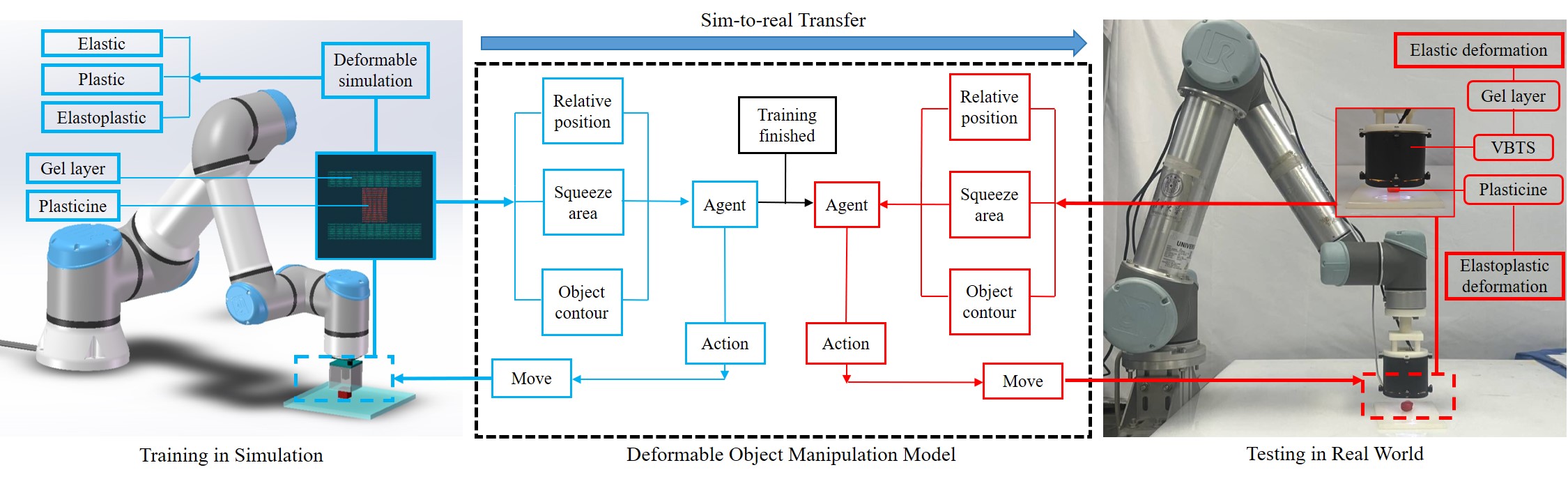
Deformable object manipulation is a classical and challenging research area in robotics. Compared with rigid object manipulation, this problem is more complex due to the deformation properties including elastic, plastic, and elastoplastic deformation. In this paper, we describe a new deformable object manipulation method including soft contact simulation, manipulation learning, and sim-to-real transfer. We propose a novel approach utilizing Vision-Based Tactile Sensors (VBTSs) as the end-effector in simulation to produce observations like relative position, squeezed area, and object contour, which are transferable to real robots. For a more realistic contact simulation, a new simulation environment including elastic, plastic, and elastoplastic deformations is created. We utilize RL strategies to train agents in the simulation, and expert demonstrations are applied for challenging tasks. Finally, we build a real experimental platform to complete the sim-to-real transfer and achieve a 90% success rate on difficult tasks such as cylinder and sphere. To test the robustness of our method, we use plasticine of different hardness and sizes to repeat the tasks including cylinder and sphere. The experimental results show superior performances of deformable object manipulation with the proposed method.
Read more5/14/2024
📶
0
SPIN: Simultaneous Perception, Interaction and Navigation
Shagun Uppal, Ananye Agarwal, Haoyu Xiong, Kenneth Shaw, Deepak Pathak
While there has been remarkable progress recently in the fields of manipulation and locomotion, mobile manipulation remains a long-standing challenge. Compared to locomotion or static manipulation, a mobile system must make a diverse range of long-horizon tasks feasible in unstructured and dynamic environments. While the applications are broad and interesting, there are a plethora of challenges in developing these systems such as coordination between the base and arm, reliance on onboard perception for perceiving and interacting with the environment, and most importantly, simultaneously integrating all these parts together. Prior works approach the problem using disentangled modular skills for mobility and manipulation that are trivially tied together. This causes several limitations such as compounding errors, delays in decision-making, and no whole-body coordination. In this work, we present a reactive mobile manipulation framework that uses an active visual system to consciously perceive and react to its environment. Similar to how humans leverage whole-body and hand-eye coordination, we develop a mobile manipulator that exploits its ability to move and see, more specifically -- to move in order to see and to see in order to move. This allows it to not only move around and interact with its environment but also, choose when to perceive what using an active visual system. We observe that such an agent learns to navigate around complex cluttered scenarios while displaying agile whole-body coordination using only ego-vision without needing to create environment maps. Results visualizations and videos at https://spin-robot.github.io/
Read more5/14/2024