Into the Fog: Evaluating Multiple Object Tracking Robustness

0
💬
Sign in to get full access
Overview
- This document provides guidelines for authors on how to properly format their responses when submitting a paper to a conference or journal.
- It covers key aspects such as the recommended length of the response, formatting instructions, and guidance on the content and structure.
- The guidelines aim to ensure a consistent and professional presentation of author responses across submissions.
Plain English Explanation
The provided paper outlines the formatting guidelines that authors should follow when writing their response to feedback on a research paper they have submitted for publication. This is an important step in the academic publishing process, as it allows authors to address any questions or concerns raised by reviewers in a clear and organized manner.
The guidelines cover the recommended length of the response, which is typically limited to a few paragraphs. This ensures that the response remains concise and focused, addressing the key points raised by the reviewers without becoming overly verbose.
The paper also provides instructions on the formatting of the response, such as the use of appropriate section headings, font styles, and spacing. These formatting guidelines help to create a consistent and professional-looking document that is easy for reviewers to read and navigate.
In terms of the content, the guidelines suggest that authors should focus on addressing the specific feedback received, providing clarification or additional information as needed. The response should be written in a clear and accessible language, avoiding overly technical jargon or complex terminology. By doing so, the authors can ensure that their response is understood by a wide audience, including non-experts in the field.
Overall, the guidelines outlined in this paper are designed to help authors effectively communicate their responses to reviewers, ultimately improving the quality and impact of their published research.
Technical Explanation
The paper provides a set of guidelines for authors to follow when preparing their response to reviewers' comments on a submitted paper. The guidelines cover several key aspects:
-
Response Length: The recommended length for the author response is typically limited to a few paragraphs, with the goal of being concise and focused.
-
Formatting: The guidelines specify the formatting requirements for the author response, including the use of appropriate section headings, font styles, and spacing. This ensures a consistent and professional presentation of the response across different submissions.
-
Content and Structure: The guidelines suggest that authors should focus their response on addressing the specific feedback received from the reviewers. This may involve providing clarification, additional information, or addressing any concerns or questions raised. The response should be written in a clear and accessible language, avoiding overly technical jargon.
-
Incorporation of Reviewer Feedback: The guidelines encourage authors to thoughtfully consider and incorporate the feedback provided by the reviewers, as this can help to improve the quality and impact of the published research.
By following these guidelines, authors can ensure that their responses to reviewers are well-organized, easy to understand, and effectively address the concerns raised, ultimately increasing the likelihood of their paper being accepted for publication.
Critical Analysis
The guidelines provided in the paper are generally well-structured and comprehensive, addressing the key elements that authors should consider when preparing their response to reviewers' comments.
One potential limitation is that the guidelines may not be flexible enough to accommodate the diverse range of feedback that authors may receive. Some reviewers may provide highly specific or complex feedback that may require a more detailed or nuanced response than the guidelines suggest.
Additionally, the guidelines do not explicitly address the tone or style of the response, which can also be an important factor in how the response is received by the reviewers. While the guidelines emphasize the importance of using clear and accessible language, they could potentially provide more guidance on maintaining a respectful and constructive tone throughout the response.
Another area for potential improvement is the inclusion of more examples or templates that authors could use as a reference when drafting their responses. This could help to illustrate the principles outlined in the guidelines and provide a starting point for authors who may be less experienced in this process.
Overall, the guidelines presented in the paper provide a solid foundation for authors to follow when preparing their responses to reviewers. However, there may be opportunities to further refine and expand the guidelines to better address the nuances and challenges that authors may face in this process.
Conclusion
The guidelines outlined in this paper provide a comprehensive set of instructions for authors to follow when preparing their response to reviewers' comments on a submitted research paper. The guidelines cover key aspects such as the recommended length of the response, formatting requirements, and the content and structure of the response.
By adhering to these guidelines, authors can ensure that their responses are well-organized, easy to understand, and effectively address the concerns raised by the reviewers. This, in turn, can increase the likelihood of the paper being accepted for publication, ultimately contributing to the advancement of knowledge in the field.
The guidelines presented in this paper are a valuable resource for authors at all stages of their academic careers, providing a consistent and professional framework for communicating with reviewers and improving the quality of their published research.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
0
Into the Fog: Evaluating Multiple Object Tracking Robustness
Nadezda Kirillova, M. Jehanzeb Mirza, Horst Possegger, Horst Bischof
State-of-the-art (SOTA) trackers have shown remarkable Multiple Object Tracking (MOT) performance when trained and evaluated on current benchmarks. However, these benchmarks primarily consist of clear scenarios, overlooking adverse atmospheric conditions such as fog, haze, smoke and dust. As a result, the robustness of SOTA trackers remains underexplored. To address these limitations, we propose a pipeline for physic-based volumetric fog simulation in arbitrary real-world MOT dataset utilizing frame-by-frame monocular depth estimation and a fog formation optical model. Moreover, we enhance our simulation by rendering of both homogeneous and heterogeneous fog effects. We propose to use the dark channel prior method to estimate fog (smoke) color, which shows promising results even in night and indoor scenes. We present the leading tracking benchmark MOTChallenge (MOT17 dataset) overlaid by fog (smoke for indoor scenes) of various intensity levels and conduct a comprehensive evaluation of SOTA MOT methods, revealing their limitations under fog and fog-similar challenges.
Read more4/17/2024

0
Effect of Fog Particle Size Distribution on 3D Object Detection Under Adverse Weather Conditions
Ajinkya Shinde, Gaurav Sharma, Manisha Pattanaik, Sri Niwas Singh
LiDAR-based sensors employing optical spectrum signals play a vital role in providing significant information about the target objects in autonomous driving vehicle systems. However, the presence of fog in the atmosphere severely degrades the overall system's performance. This manuscript analyzes the role of fog particle size distributions in 3D object detection under adverse weather conditions. We utilise Mie theory and meteorological optical range (MOR) to calculate the attenuation and backscattering coefficient values for point cloud generation and analyze the overall system's accuracy in Car, Cyclist, and Pedestrian case scenarios under easy, medium and hard detection difficulties. Gamma and Junge (Power-Law) distributions are employed to mathematically model the fog particle size distribution under strong and moderate advection fog environments. Subsequently, we modified the KITTI dataset based on the backscattering coefficient values and trained it on the PV-RCNN++ deep neural network model for Car, Cyclist, and Pedestrian cases under different detection difficulties. The result analysis shows a significant variation in the system's accuracy concerning the changes in target object dimensionality, the nature of the fog environment and increasing detection difficulties, with the Car exhibiting the highest accuracy of around 99% and the Pedestrian showing the lowest accuracy of around 73%.
Read more8/6/2024
0
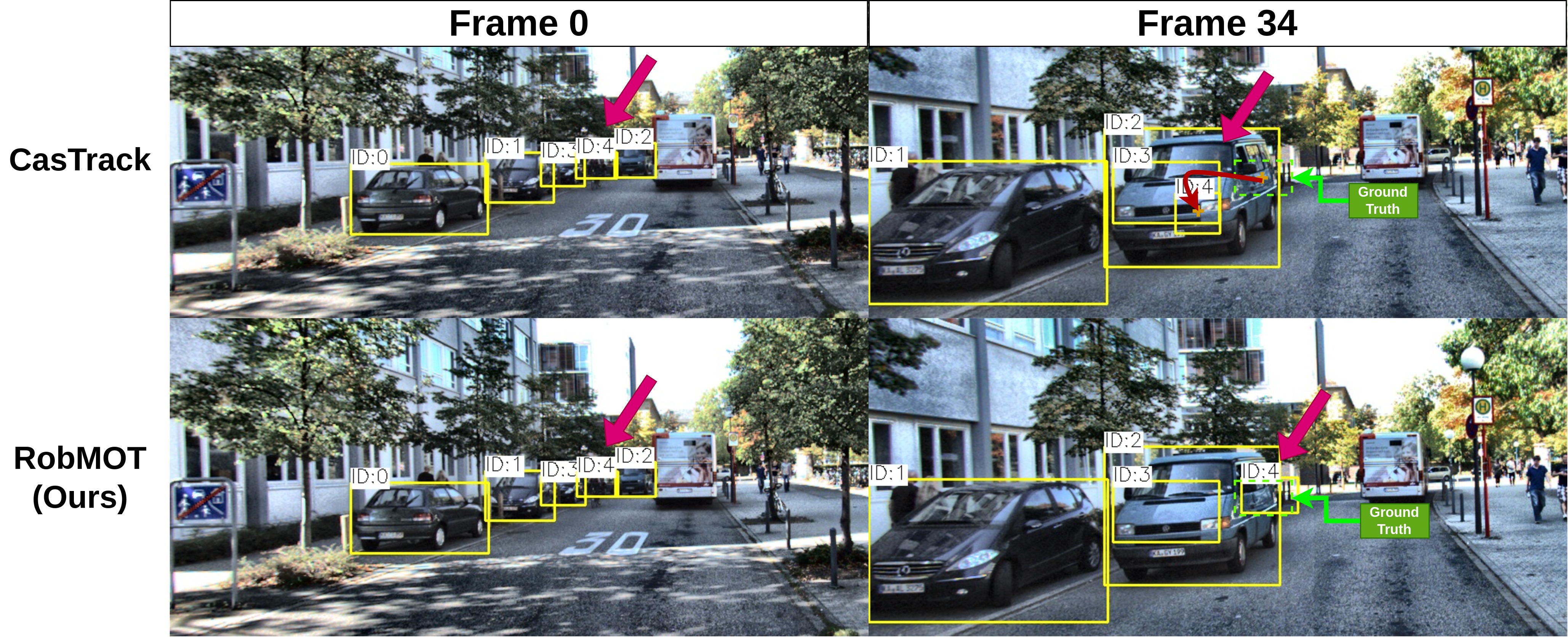
RobMOT: Robust 3D Multi-Object Tracking by Observational Noise and State Estimation Drift Mitigation on LiDAR PointCloud
Mohamed Nagy, Naoufel Werghi, Bilal Hassan, Jorge Dias, Majid Khonji
This work addresses limitations in recent 3D tracking-by-detection methods, focusing on identifying legitimate trajectories and addressing state estimation drift in Kalman filters. Current methods rely heavily on threshold-based filtering of false positive detections using detection scores to prevent ghost trajectories. However, this approach is inadequate for distant and partially occluded objects, where detection scores tend to drop, potentially leading to false positives exceeding the threshold. Additionally, the literature generally treats detections as precise localizations of objects. Our research reveals that noise in detections impacts localization information, causing trajectory drift for occluded objects and hindering recovery. To this end, we propose a novel online track validity mechanism that temporally distinguishes between legitimate and ghost tracks, along with a multi-stage observational gating process for incoming observations. This mechanism significantly improves tracking performance, with a $6.28%$ in HOTA and a $17.87%$ increase in MOTA. We also introduce a refinement to the Kalman filter that enhances noise mitigation in trajectory drift, leading to more robust state estimation for occluded objects. Our framework, RobMOT, outperforms state-of-the-art methods, including deep learning approaches, across various detectors, achieving up to a $4%$ margin in HOTA and $6%$ in MOTA. RobMOT excels under challenging conditions, such as prolonged occlusions and tracking distant objects, with up to a 59% improvement in processing latency.
Read more6/21/2024

0
Distributed Multi-Object Tracking Under Limited Field of View Heterogeneous Sensors with Density Clustering
Fei Chen, Hoa Van Nguyen, Alex S. Leong, Sabita Panicker, Robin Baker, Damith C. Ranasinghe
We consider the problem of tracking multiple, unknown, and time-varying numbers of objects using a distributed network of heterogeneous sensors. In an effort to derive a formulation for practical settings, we consider limited and unknown sensor field-of-views (FoVs), sensors with limited local computational resources and communication channel capacity. The resulting distributed multi-object tracking algorithm involves solving an NP-hard multidimensional assignment problem either optimally for small-size problems or sub-optimally for general practical problems. For general problems, we propose an efficient distributed multi-object tracking algorithm that performs track-to-track fusion using a clustering-based analysis of the state space transformed into a density space to mitigate the complexity of the assignment problem. The proposed algorithm can more efficiently group local track estimates for fusion than existing approaches. To ensure we achieve globally consistent identities for tracks across a network of nodes as objects move between FoVs, we develop a graph-based algorithm to achieve label consensus and minimise track segmentation. Numerical experiments with synthetic and real-world trajectory datasets demonstrate that our proposed method is significantly more computationally efficient than state-of-the-art solutions, achieving similar tracking accuracy and bandwidth requirements but with improved label consistency.
Read more9/12/2024