KITchen: A Real-World Benchmark and Dataset for 6D Object Pose Estimation in Kitchen Environments

0

Sign in to get full access
Overview
- KITchen is a new real-world benchmark and dataset for 6D object pose estimation in kitchen environments
- It provides a comprehensive evaluation of state-of-the-art 6D pose estimation methods in a complex, realistic setting
- The dataset includes over 50,000 images of 28 household objects captured in a real kitchen environment
Plain English Explanation
The KITchen dataset and benchmark aims to advance the field of 6D object pose estimation - the task of precisely determining an object's 3D position and orientation in a scene. This is an important capability for applications like robotic manipulation and augmented reality.
Previous datasets for this task have often been limited to simple, lab-like environments. KITchen instead captures real-world kitchen scenes, which are much more complex and cluttered. This provides a more realistic and challenging setting to evaluate the latest 6D pose estimation methods.
The dataset contains over 50,000 images of 28 common household objects, such as cups, plates, and utensils, captured in a real kitchen environment. Researchers can use this data to train and test their 6D pose estimation models, and the benchmark provides a way to compare the performance of different approaches.
By creating this realistic benchmark, the researchers hope to spur further advances in 6D pose estimation that can enable more capable robotic systems and augmented reality applications in real-world environments.
Technical Explanation
The KITchen dataset was captured using a motion capture system and high-resolution RGB-D cameras in a real kitchen environment. It includes over 50,000 images of 28 common household objects, along with their 6D ground truth poses.
The objects were placed in various configurations on kitchen surfaces, and the cameras captured images from different viewpoints. This resulted in a diverse dataset that reflects the complexity and clutter typical of real-world kitchen scenes.
The researchers also developed a comprehensive benchmark to evaluate the performance of 6D pose estimation algorithms on the KITchen dataset. This includes metrics for measuring the accuracy of the estimated object poses, as well as analysis of runtime and other practical considerations.
Several state-of-the-art 6D pose estimation methods were evaluated on the KITchen benchmark, revealing insights into their strengths and weaknesses in challenging real-world environments. The results highlight the need for further advancements in 6D pose estimation to achieve reliable performance in complex, cluttered scenes.
Critical Analysis
The KITchen dataset and benchmark represent an important step forward in the evaluation of 6D pose estimation algorithms. By providing a realistic, real-world setting, the researchers have created a more meaningful test of these methods' practical capabilities.
However, the dataset is limited to a single kitchen environment, which may not capture the full diversity of real-world kitchen scenes. Further expansion to include multiple kitchen setups, lighting conditions, and object variations could make the benchmark even more comprehensive.
Additionally, the 6D pose estimation task is just one component of many in robotic manipulation and augmented reality applications. Integrating the KITchen benchmark into larger end-to-end systems would provide a more holistic assessment of how these technologies perform in realistic use cases.
Overall, the KITchen dataset and benchmark are a valuable contribution to the field, and will likely inspire further research and development in 6D pose estimation for real-world applications.
Conclusion
The KITchen dataset and benchmark represent an important advancement in the evaluation of 6D object pose estimation algorithms. By providing a comprehensive, real-world dataset and benchmark, the researchers have created a more meaningful test of these methods' practical capabilities in complex, cluttered environments.
The insights gained from evaluating state-of-the-art 6D pose estimation techniques on the KITchen benchmark will help drive further progress in this critical area of computer vision and robotics. Continued advancements in 6D pose estimation can enable more capable robotic systems and augmented reality applications that can seamlessly interact with the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
KITchen: A Real-World Benchmark and Dataset for 6D Object Pose Estimation in Kitchen Environments
Abdelrahman Younes, Tamim Asfour
Despite the recent progress on 6D object pose estimation methods for robotic grasping, a substantial performance gap persists between the capabilities of these methods on existing datasets and their efficacy in real-world grasping and mobile manipulation tasks, particularly when robots rely solely on their monocular egocentric field of view (FOV). Existing real-world datasets primarily focus on table-top grasping scenarios, where a robot arm is placed in a fixed position and the objects are centralized within the FOV of fixed external camera(s). Assessing performance on such datasets may not accurately reflect the challenges encountered in everyday grasping and mobile manipulation tasks within kitchen environments such as retrieving objects from higher shelves, sinks, dishwashers, ovens, refrigerators, or microwaves. To address this gap, we present KITchen, a novel benchmark designed specifically for estimating the 6D poses of objects located in diverse positions within kitchen settings. For this purpose, we recorded a comprehensive dataset comprising around 205k real-world RGBD images for 111 kitchen objects captured in two distinct kitchens, utilizing a humanoid robot with its egocentric perspectives. Subsequently, we developed a semi-automated annotation pipeline, to streamline the labeling process of such datasets, resulting in the generation of 2D object labels, 2D object segmentation masks, and 6D object poses with minimal human effort. The benchmark, the dataset, and the annotation pipeline will be publicly available at https://kitchen-dataset.github.io/KITchen.
Read more7/30/2024
0
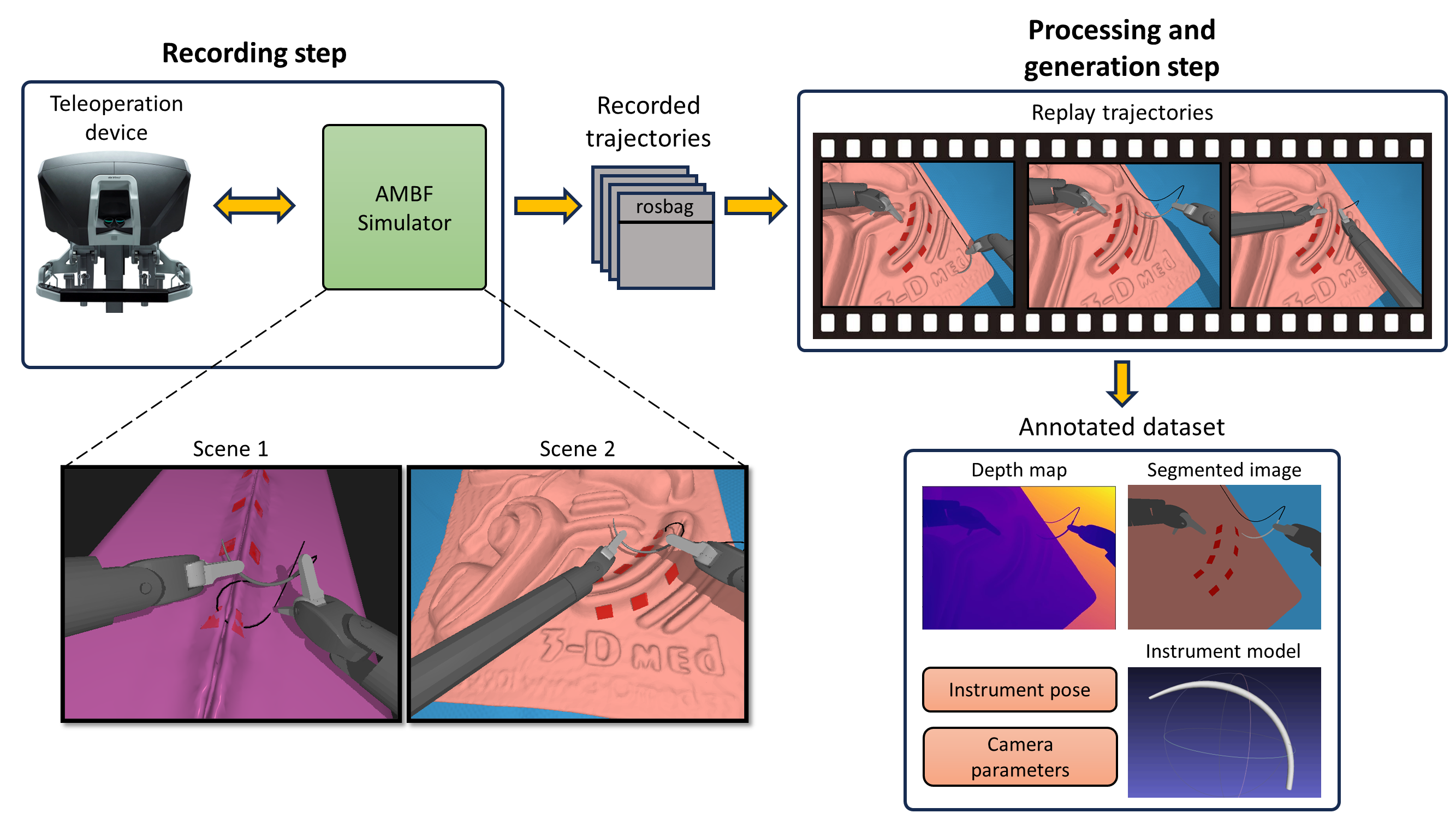
Realistic Data Generation for 6D Pose Estimation of Surgical Instruments
Juan Antonio Barragan, Jintan Zhang, Haoying Zhou, Adnan Munawar, Peter Kazanzides
Automation in surgical robotics has the potential to improve patient safety and surgical efficiency, but it is difficult to achieve due to the need for robust perception algorithms. In particular, 6D pose estimation of surgical instruments is critical to enable the automatic execution of surgical maneuvers based on visual feedback. In recent years, supervised deep learning algorithms have shown increasingly better performance at 6D pose estimation tasks; yet, their success depends on the availability of large amounts of annotated data. In household and industrial settings, synthetic data, generated with 3D computer graphics software, has been shown as an alternative to minimize annotation costs of 6D pose datasets. However, this strategy does not translate well to surgical domains as commercial graphics software have limited tools to generate images depicting realistic instrument-tissue interactions. To address these limitations, we propose an improved simulation environment for surgical robotics that enables the automatic generation of large and diverse datasets for 6D pose estimation of surgical instruments. Among the improvements, we developed an automated data generation pipeline and an improved surgical scene. To show the applicability of our system, we generated a dataset of 7.5k images with pose annotations of a surgical needle that was used to evaluate a state-of-the-art pose estimation network. The trained model obtained a mean translational error of 2.59mm on a challenging dataset that presented varying levels of occlusion. These results highlight our pipeline's success in training and evaluating novel vision algorithms for surgical robotics applications.
Read more6/12/2024

0
Omni6DPose: A Benchmark and Model for Universal 6D Object Pose Estimation and Tracking
Jiyao Zhang, Weiyao Huang, Bo Peng, Mingdong Wu, Fei Hu, Zijian Chen, Bo Zhao, Hao Dong
6D Object Pose Estimation is a crucial yet challenging task in computer vision, suffering from a significant lack of large-scale datasets. This scarcity impedes comprehensive evaluation of model performance, limiting research advancements. Furthermore, the restricted number of available instances or categories curtails its applications. To address these issues, this paper introduces Omni6DPose, a substantial dataset characterized by its diversity in object categories, large scale, and variety in object materials. Omni6DPose is divided into three main components: ROPE (Real 6D Object Pose Estimation Dataset), which includes 332K images annotated with over 1.5M annotations across 581 instances in 149 categories; SOPE(Simulated 6D Object Pose Estimation Dataset), consisting of 475K images created in a mixed reality setting with depth simulation, annotated with over 5M annotations across 4162 instances in the same 149 categories; and the manually aligned real scanned objects used in both ROPE and SOPE. Omni6DPose is inherently challenging due to the substantial variations and ambiguities. To address this challenge, we introduce GenPose++, an enhanced version of the SOTA category-level pose estimation framework, incorporating two pivotal improvements: Semantic-aware feature extraction and Clustering-based aggregation. Moreover, we provide a comprehensive benchmarking analysis to evaluate the performance of previous methods on this large-scale dataset in the realms of 6D object pose estimation and pose tracking.
Read more6/7/2024
🎯
0
A Benchmark Grocery Dataset of Realworld Point Clouds From Single View
Shivanand Venkanna Sheshappanavar, Tejas Anvekar, Shivanand Kundargi, Yufan Wang, Chandra Kambhamettu
Fine-grained grocery object recognition is an important computer vision problem with broad applications in automatic checkout, in-store robotic navigation, and assistive technologies for the visually impaired. Existing datasets on groceries are mainly 2D images. Models trained on these datasets are limited to learning features from the regular 2D grids. While portable 3D sensors such as Kinect were commonly available for mobile phones, sensors such as LiDAR and TrueDepth, have recently been integrated into mobile phones. Despite the availability of mobile 3D sensors, there are currently no dedicated real-world large-scale benchmark 3D datasets for grocery. In addition, existing 3D datasets lack fine-grained grocery categories and have limited training samples. Furthermore, collecting data by going around the object versus the traditional photo capture makes data collection cumbersome. Thus, we introduce a large-scale grocery dataset called 3DGrocery100. It constitutes 100 classes, with a total of 87,898 3D point clouds created from 10,755 RGB-D single-view images. We benchmark our dataset on six recent state-of-the-art 3D point cloud classification models. Additionally, we also benchmark the dataset on few-shot and continual learning point cloud classification tasks. Project Page: https://bigdatavision.org/3DGrocery100/.
Read more4/9/2024