Koopman-based Deep Learning for Nonlinear System Estimation
2405.00627
0
0

Abstract
Nonlinear differential equations are encountered as models of fluid flow, spiking neurons, and many other systems of interest in the real world. Common features of these systems are that their behaviors are difficult to describe exactly and invariably unmodeled dynamics present challenges in making precise predictions. In many cases the models exhibit extremely complicated behavior due to bifurcations and chaotic regimes. In this paper, we present a novel data-driven linear estimator that uses Koopman operator theory to extract finite-dimensional representations of complex nonlinear systems. The extracted model is used together with a deep reinforcement learning network that learns the optimal stepwise actions to predict future states of the original nonlinear system. Our estimator is also adaptive to a diffeomorphic transformation of the nonlinear system which enables transfer learning to compute state estimates of the transformed system without relearning from scratch.
Create account to get full access
Overview
- This paper explores the use of Koopman-based deep learning for estimating nonlinear dynamical systems.
- It proposes a novel approach that combines the Koopman operator theory with deep neural networks to model the evolution of complex, nonlinear systems.
- The method aims to provide accurate predictions of system behavior without requiring detailed knowledge of the underlying dynamics.
Plain English Explanation
Imagine you have a system that behaves in a complex, unpredictable way, like the swaying of a bridge or the flow of water in a river. Traditionally, to understand and predict how these systems evolve over time, scientists would need to have a detailed mathematical model of the underlying physics. This can be incredibly challenging, especially for highly nonlinear and chaotic systems.
The researchers in this paper propose a new approach that sidesteps the need for a detailed model. Instead, they use a technique called the Koopman operator, which allows them to represent the dynamics of the system using a linear operator. By combining this Koopman operator with deep neural networks, they can capture the complex, nonlinear behavior of the system and make accurate predictions about its future behavior.
The key advantage of this Koopman-based deep learning approach is that it can work with systems that are difficult to model mathematically, without requiring a full understanding of the underlying physics. This could be particularly useful in fields like fluid dynamics, partial differential equations, and complex network dynamics, where traditional modeling approaches can be challenging.
Technical Explanation
The paper proposes a Koopman-based deep learning framework for nonlinear system estimation. The Koopman operator is a linear operator that can represent the dynamics of a nonlinear system, and the authors leverage this to develop a deep neural network architecture that can learn the Koopman operator from data.
Specifically, the authors use a closed-loop Koopman operator approximation to learn a model that can predict the future evolution of the system's state. The network takes in the current state of the system and outputs the next state, allowing for iterative predictions over time.
The authors evaluate their approach on several nonlinear dynamical systems, including the Lorenz system and the Kuramoto-Sivashinsky equation. They demonstrate that their Koopman-based deep learning model can outperform traditional system identification methods in terms of prediction accuracy and computational efficiency.
Critical Analysis
The paper presents a promising approach for modeling complex, nonlinear dynamical systems without requiring detailed knowledge of the underlying physics. The use of the Koopman operator theory, combined with the representational power of deep neural networks, allows the model to capture the intricate dynamics of the system.
However, the paper does not address the sample complexity of the proposed method, which could be a concern for practical applications. Additionally, the paper does not explore the potential limitations of the Koopman operator approximation, such as its ability to handle systems with discontinuities or highly chaotic behavior.
Further research could investigate the robustness of the Koopman-based deep learning approach to noise, model uncertainties, and other practical challenges. Additionally, exploring the interpretability of the learned Koopman operator could provide valuable insights into the underlying system dynamics.
Conclusion
This paper presents a novel Koopman-based deep learning approach for nonlinear system estimation, which has the potential to significantly simplify the modeling of complex dynamical systems. By combining the Koopman operator theory with the representational power of deep neural networks, the authors have developed a method that can accurately predict the future evolution of nonlinear systems without requiring a detailed understanding of the underlying physics.
While the paper demonstrates promising results, further research is needed to address the potential limitations and explore the broader implications of this approach. Nonetheless, the Koopman-based deep learning framework represents an exciting step forward in the field of system identification and control, with applications in areas such as fluid dynamics, partial differential equations, and complex network analysis.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Extraction of nonlinearity in neural networks with Koopman operator
Naoki Sugishita, Kayo Kinjo, Jun Ohkubo
0
0
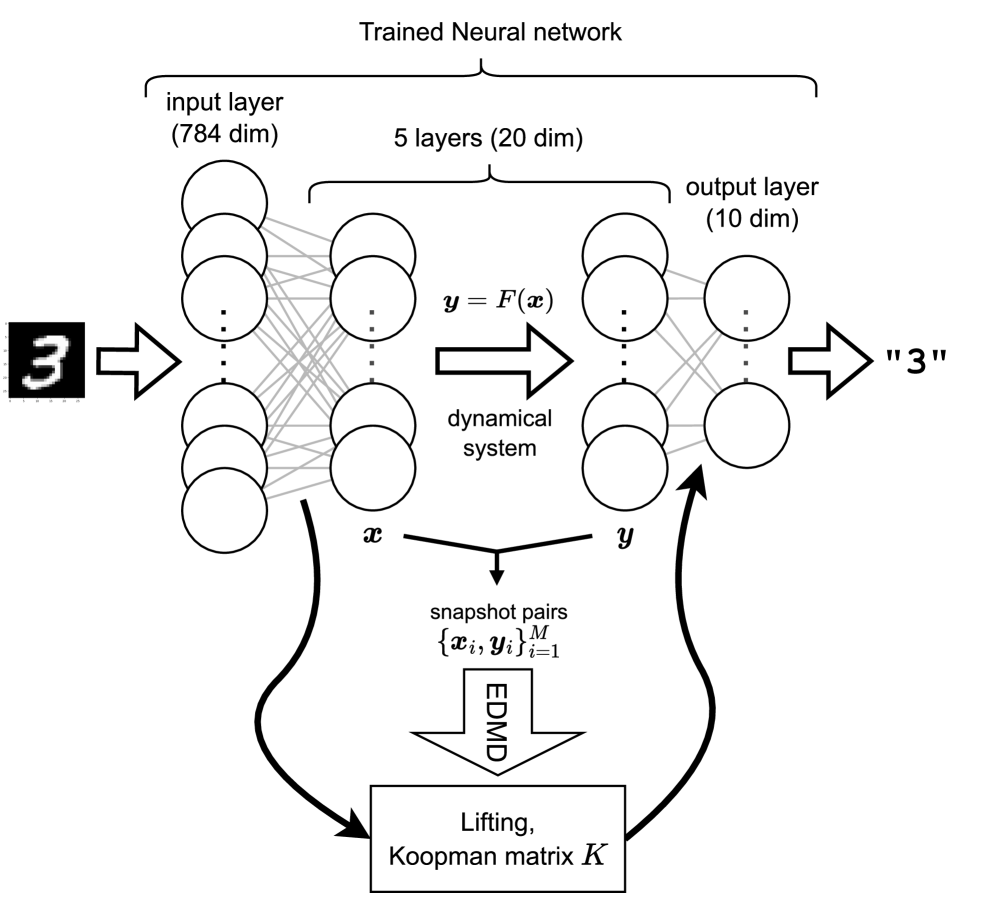
Nonlinearity plays a crucial role in deep neural networks. In this paper, we investigate the degree to which the nonlinearity of the neural network is essential. For this purpose, we employ the Koopman operator, extended dynamic mode decomposition, and the tensor-train format. The Koopman operator approach has been recently developed in physics and nonlinear sciences; the Koopman operator deals with the time evolution in the observable space instead of the state space. Since we can replace the nonlinearity in the state space with the linearity in the observable space, it is a hopeful candidate for understanding complex behavior in nonlinear systems. Here, we analyze learned neural networks for the classification problems. As a result, the replacement of the nonlinear middle layers with the Koopman matrix yields enough accuracy in numerical experiments. In addition, we confirm that the pruning of the Koopman matrix gives sufficient accuracy even at high compression ratios. These results indicate the possibility of extracting some features in the neural networks with the Koopman operator approach.
6/28/2024
🔮
Nonparametric Control-Koopman Operator Learning: Flexible and Scalable Models for Prediction and Control
Petar Bevanda, Bas Driessen, Lucian Cristian Iacob, Roland Toth, Stefan Sosnowski, Sandra Hirche
0
0
Linearity of Koopman operators and simplicity of their estimators coupled with model-reduction capabilities has lead to their great popularity in applications for learning dynamical systems. While nonparametric Koopman operator learning in infinite-dimensional reproducing kernel Hilbert spaces is well understood for autonomous systems, its control system analogues are largely unexplored. Addressing systems with control inputs in a principled manner is crucial for fully data-driven learning of controllers, especially since existing approaches commonly resort to representational heuristics or parametric models of limited expressiveness and scalability. We address the aforementioned challenge by proposing a universal framework via control-affine reproducing kernels that enables direct estimation of a single operator even for control systems. The proposed approach, called control-Koopman operator regression (cKOR), is thus completely analogous to Koopman operator regression of the autonomous case. First in the literature, we present a nonparametric framework for learning Koopman operator representations of nonlinear control-affine systems that does not suffer from the curse of control input dimensionality. This allows for reformulating the infinite-dimensional learning problem in a finite-dimensional space based solely on data without apriori loss of precision due to a restriction to a finite span of functions or inputs as in other approaches. For enabling applications to large-scale control systems, we also enhance the scalability of control-Koopman operator estimators by leveraging random projections (sketching). The efficacy of our novel cKOR approach is demonstrated on both forecasting and control tasks.
5/14/2024
❗
Closed-Loop Koopman Operator Approximation
Steven Dahdah, James Richard Forbes
0
0
This paper proposes a method to identify a Koopman model of a feedback-controlled system given a known controller. The Koopman operator allows a nonlinear system to be rewritten as an infinite-dimensional linear system by viewing it in terms of an infinite set of lifting functions. A finite-dimensional approximation of the Koopman operator can be identified from data by choosing a finite subset of lifting functions and solving a regression problem in the lifted space. Existing methods are designed to identify open-loop systems. However, it is impractical or impossible to run experiments on some systems, such as unstable systems, in an open-loop fashion. The proposed method leverages the linearity of the Koopman operator, along with knowledge of the controller and the structure of the closed-loop system, to simultaneously identify the closed-loop and plant systems. The advantages of the proposed closed-loop Koopman operator approximation method are demonstrated in simulation using a Duffing oscillator and experimentally using a rotary inverted pendulum system. An open-source software implementation of the proposed method is publicly available, along with the experimental dataset generated for this paper.
5/2/2024
🌿
Estimation Sample Complexity of a Class of Nonlinear Continuous-time Systems
Simon Kuang, Xinfan Lin
0
0
We present a method of parameter estimation for large class of nonlinear systems, namely those in which the state consists of output derivatives and the flow is linear in the parameter. The method, which solves for the unknown parameter by directly inverting the dynamics using regularized linear regression, is based on new design and analysis ideas for differentiation filtering and regularized least squares. Combined in series, they yield a novel finite-sample bound on mean absolute error of estimation.
4/24/2024