Gaussian process learning of nonlinear dynamics
2312.12193
0
0
Abstract
One of the pivotal tasks in scientific machine learning is to represent underlying dynamical systems from time series data. Many methods for such dynamics learning explicitly require the derivatives of state data, which are not directly available and can be approximated conventionally by finite differences. However, the discrete approximations of time derivatives may result in poor estimations when state data are scarce and/or corrupted by noise, thus compromising the predictiveness of the learned dynamical models. To overcome this technical hurdle, we propose a new method that learns nonlinear dynamics through a Bayesian inference of characterizing model parameters. This method leverages a Gaussian process representation of states, and constructs a likelihood function using the correlation between state data and their derivatives, yet prevents explicit evaluations of time derivatives. Through a Bayesian scheme, a probabilistic estimate of the model parameters is given by the posterior distribution, and thus a quantification is facilitated for uncertainties from noisy state data and the learning process. Specifically, we will discuss the applicability of the proposed method to several typical scenarios for dynamical systems: identification and estimation with an affine parametrization, nonlinear parametric approximation without prior knowledge, and general parameter estimation for a given dynamical system.
Create account to get full access
Overview
- This paper presents a method for learning the dynamics of nonlinear systems using Gaussian processes.
- The approach models the system's state transition function as a Gaussian process, allowing for flexible and data-driven modeling of complex dynamics.
- The paper demonstrates the effectiveness of this Gaussian process learning approach on several nonlinear dynamical systems.
Plain English Explanation
In many real-world applications, we need to understand and predict the behavior of complex, nonlinear systems. This could include anything from the motion of a robot arm to the dynamics of the stock market. However, accurately modeling these nonlinear dynamics can be very challenging, as they often exhibit complicated and unpredictable behavior.
The researchers in this paper propose using a powerful machine learning technique called Gaussian processes to learn the dynamics of nonlinear systems directly from data. Gaussian processes are a flexible class of models that can capture complex patterns in data. Instead of relying on a pre-determined mathematical model, the Gaussian process approach learns the dynamics in a data-driven way, allowing it to adapt to the complexities of the system being studied.
The key idea is to model the system's state transition function - which describes how the system's state changes over time - as a Gaussian process. This provides a probabilistic representation of the dynamics, allowing the model to capture uncertainties and make predictions accordingly. The paper demonstrates how this Gaussian process learning approach can be effectively applied to a variety of nonlinear dynamical systems, outperforming traditional modeling techniques.
Technical Explanation
The paper starts by defining the likelihood of the system's state transitions using a Gaussian process model. This allows the dynamics to be represented in a flexible, nonparametric way, without relying on a pre-specified mathematical form. The Gaussian process framework also naturally handles uncertainty in the dynamics, which is important for accurately modeling complex, nonlinear systems.
The authors then derive the necessary equations for learning the Gaussian process model from data, including the posterior distribution over the dynamics and the corresponding predictive distribution. This learning procedure is crucial for adapting the model to the specific nonlinear system being studied.
To demonstrate the effectiveness of their approach, the researchers apply the Gaussian process learning method to several nonlinear dynamical systems, including the classic double pendulum and a more complex model of robot arm motion. They compare the performance of their approach to other techniques, such as linear models and neural network-based methods, showing that the Gaussian process model can better capture the systems' nonlinear dynamics.
Critical Analysis
The paper presents a compelling approach for learning nonlinear dynamics using Gaussian processes, which offers several advantages over traditional modeling techniques. The probabilistic nature of the Gaussian process framework allows it to naturally handle uncertainty in the dynamics, which is crucial for accurately modeling complex, real-world systems.
However, the authors do note that the computational complexity of the Gaussian process model can be a limitation, especially for large-scale systems or real-time applications. This is an area that could benefit from further research, potentially exploring more efficient Gaussian process approximations or alternative probabilistic modeling techniques.
Additionally, the paper focuses primarily on demonstrating the effectiveness of the Gaussian process learning approach on a few specific nonlinear dynamical systems. It would be valuable to see the method applied to a wider range of real-world applications to further validate its practical usefulness and generalizability.
Conclusion
This paper introduces a novel approach for learning the dynamics of nonlinear systems using Gaussian processes. By modeling the state transition function as a Gaussian process, the method can capture complex, data-driven patterns in the system's behavior, outperforming traditional modeling techniques.
The Gaussian process learning framework offers several benefits, including the ability to handle uncertainty and adapt to the specific characteristics of the system being studied. While the computational complexity may be a limitation in some cases, the paper demonstrates the potential of this approach to advance our understanding and modeling of nonlinear dynamical systems across a variety of scientific and engineering domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Iterated INLA for State and Parameter Estimation in Nonlinear Dynamical Systems
Rafael Anderka, Marc Peter Deisenroth, So Takao
0
0
Data assimilation (DA) methods use priors arising from differential equations to robustly interpolate and extrapolate data. Popular techniques such as ensemble methods that handle high-dimensional, nonlinear PDE priors focus mostly on state estimation, however can have difficulty learning the parameters accurately. On the other hand, machine learning based approaches can naturally learn the state and parameters, but their applicability can be limited, or produce uncertainties that are hard to interpret. Inspired by the Integrated Nested Laplace Approximation (INLA) method in spatial statistics, we propose an alternative approach to DA based on iteratively linearising the dynamical model. This produces a Gaussian Markov random field at each iteration, enabling one to use INLA to infer the state and parameters. Our approach can be used for arbitrary nonlinear systems, while retaining interpretability, and is furthermore demonstrated to outperform existing methods on the DA task. By providing a more nuanced approach to handling nonlinear PDE priors, our methodology offers improved accuracy and robustness in predictions, especially where data sparsity is prevalent.
6/5/2024

DynGMA: a robust approach for learning stochastic differential equations from data
Aiqing Zhu, Qianxiao Li
0
0
Learning unknown stochastic differential equations (SDEs) from observed data is a significant and challenging task with applications in various fields. Current approaches often use neural networks to represent drift and diffusion functions, and construct likelihood-based loss by approximating the transition density to train these networks. However, these methods often rely on one-step stochastic numerical schemes, necessitating data with sufficiently high time resolution. In this paper, we introduce novel approximations to the transition density of the parameterized SDE: a Gaussian density approximation inspired by the random perturbation theory of dynamical systems, and its extension, the dynamical Gaussian mixture approximation (DynGMA). Benefiting from the robust density approximation, our method exhibits superior accuracy compared to baseline methods in learning the fully unknown drift and diffusion functions and computing the invariant distribution from trajectory data. And it is capable of handling trajectory data with low time resolution and variable, even uncontrollable, time step sizes, such as data generated from Gillespie's stochastic simulations. We then conduct several experiments across various scenarios to verify the advantages and robustness of the proposed method.
6/21/2024
🧠
Linearization Turns Neural Operators into Function-Valued Gaussian Processes
Emilia Magnani, Marvin Pfortner, Tobias Weber, Philipp Hennig
0
0
Modeling dynamical systems, e.g. in climate and engineering sciences, often necessitates solving partial differential equations. Neural operators are deep neural networks designed to learn nontrivial solution operators of such differential equations from data. As for all statistical models, the predictions of these models are imperfect and exhibit errors. Such errors are particularly difficult to spot in the complex nonlinear behaviour of dynamical systems. We introduce a new framework for approximate Bayesian uncertainty quantification in neural operators using function-valued Gaussian processes. Our approach can be interpreted as a probabilistic analogue of the concept of currying from functional programming and provides a practical yet theoretically sound way to apply the linearized Laplace approximation to neural operators. In a case study on Fourier neural operators, we show that, even for a discretized input, our method yields a Gaussian closure--a structured Gaussian process posterior capturing the uncertainty in the output function of the neural operator, which can be evaluated at an arbitrary set of points. The method adds minimal prediction overhead, can be applied post-hoc without retraining the neural operator, and scales to large models and datasets. We showcase the efficacy of our approach through applications to different types of partial differential equations.
6/10/2024
Identifying latent state transition in non-linear dynamical systems
c{C}au{g}lar H{i}zl{i}, c{C}au{g}atay Y{i}ld{i}z, Matthias Bethge, ST John, Pekka Marttinen
0
0
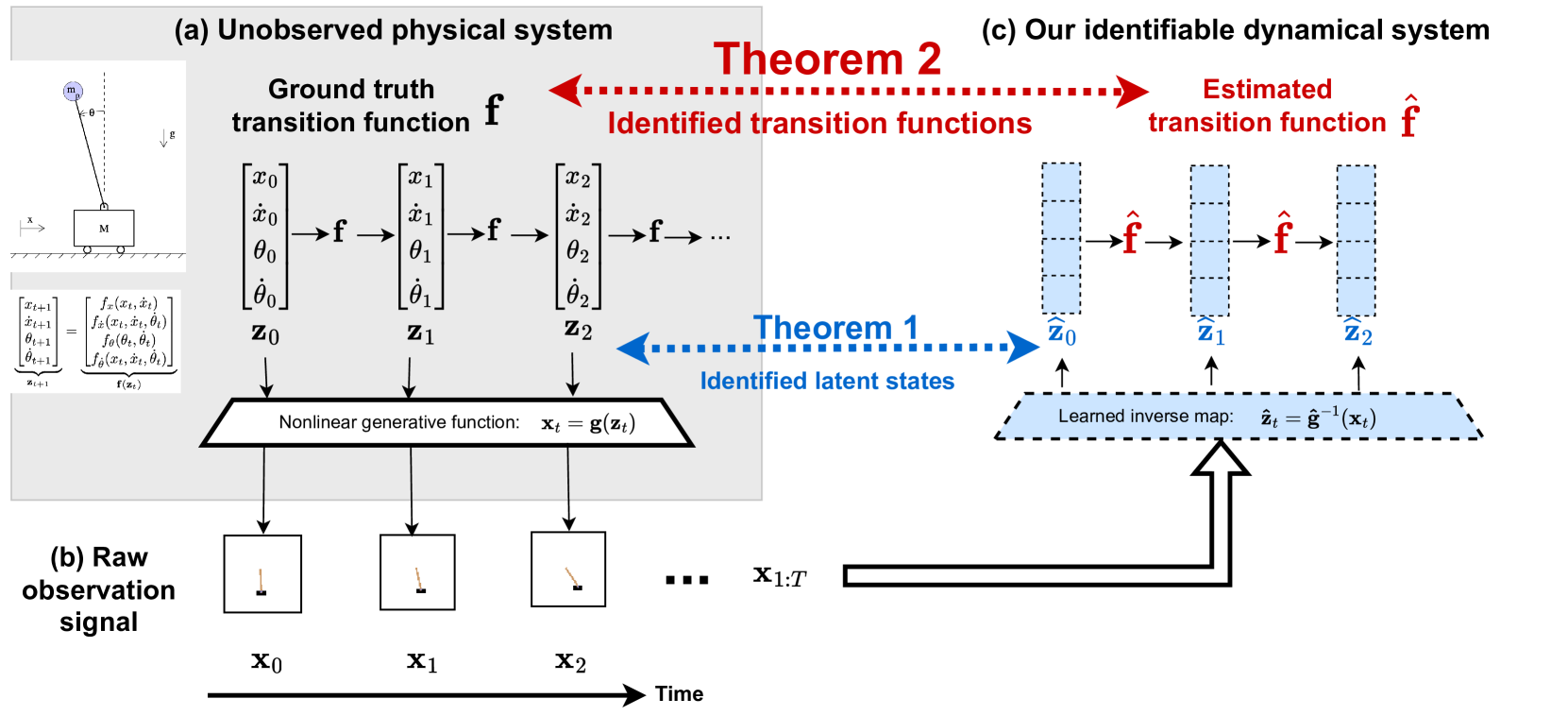
This work aims to improve generalization and interpretability of dynamical systems by recovering the underlying lower-dimensional latent states and their time evolutions. Previous work on disentangled representation learning within the realm of dynamical systems focused on the latent states, possibly with linear transition approximations. As such, they cannot identify nonlinear transition dynamics, and hence fail to reliably predict complex future behavior. Inspired by the advances in nonlinear ICA, we propose a state-space modeling framework in which we can identify not just the latent states but also the unknown transition function that maps the past states to the present. We introduce a practical algorithm based on variational auto-encoders and empirically demonstrate in realistic synthetic settings that we can (i) recover latent state dynamics with high accuracy, (ii) correspondingly achieve high future prediction accuracy, and (iii) adapt fast to new environments.
6/7/2024